0%
0%
Detachable Electric Drive for Wheelchair
The aim of this project is to build an electric drive for my daughter's manual wheelchair.
 Mike Turvey
Mike TurveyBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Kenneth Zaborny
Kenneth Zaborny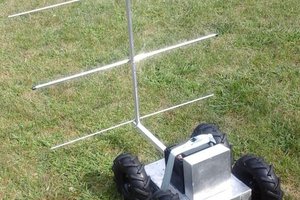
 Glenn Powers
Glenn Powers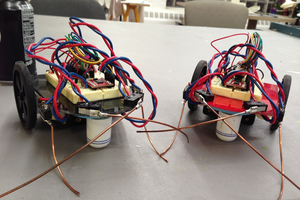

 Jim Heising
Jim Heising
I'm wondering about how this would work with a standard large wheel size chair? Different gear rations needed? Of course a much different mount. At least today battery packs are more readily available and affordable.