 Mihir Garimella
Mihir GarimellaAfter designing the mapping and navigation algorithms for Firefly, I wanted to create a flying robot so that I could test my work in real-world environments. At this point, I wasn't ready to build a flying robot from scratch, so I added sensing and processing hardware to a Parrot AR.Drone. There were a few important considerations when designing this hardware that I'm going to cover in this log.
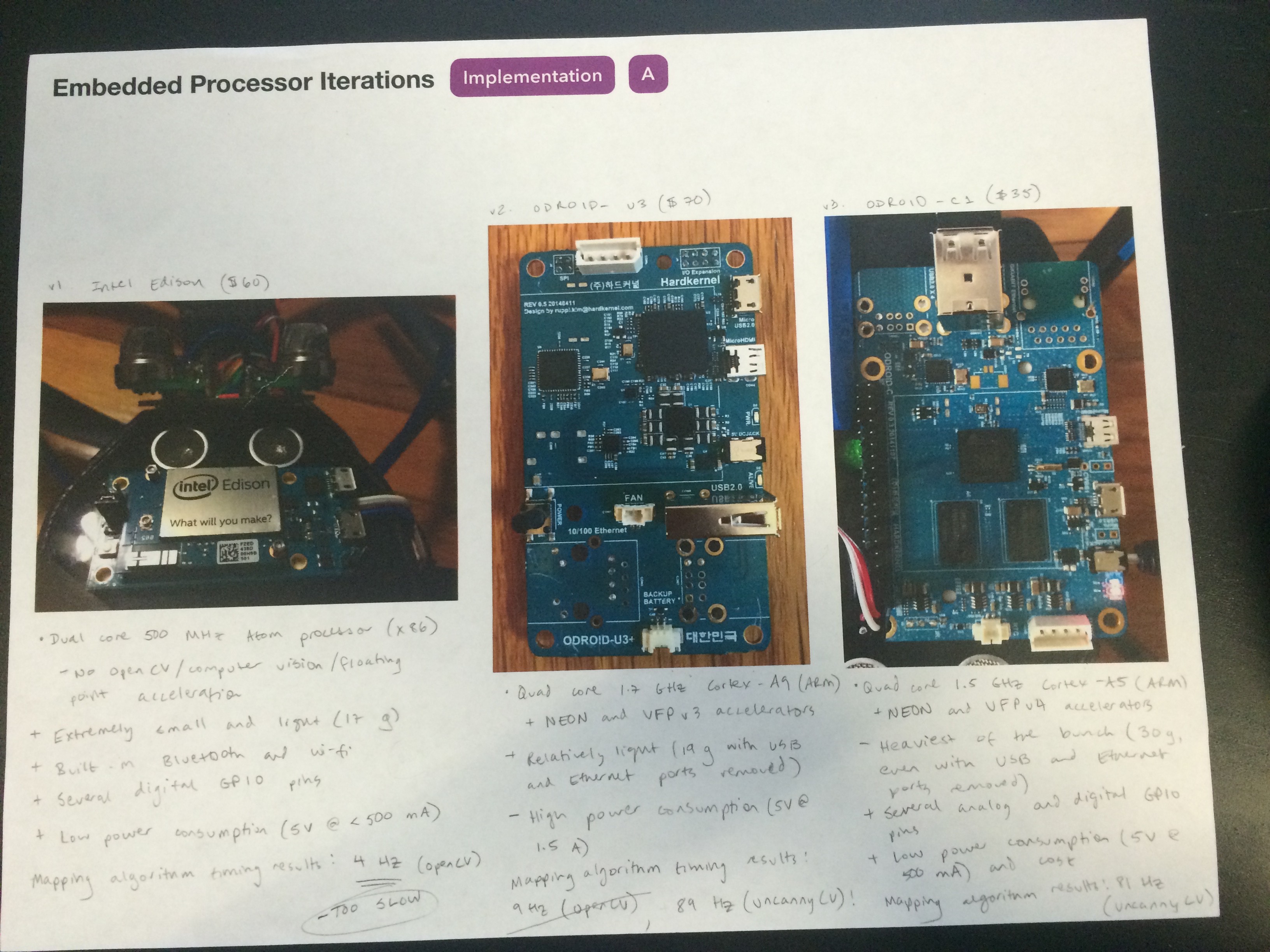
Selecting a single-board computer
My notes are below. Ultimately, I chose the ODROID-C1 because it was relatively fast but also inexpensive and energy-efficient. (The notes refer to UncannyCV, a computer vision library optimized for ARMv7-A processors.)
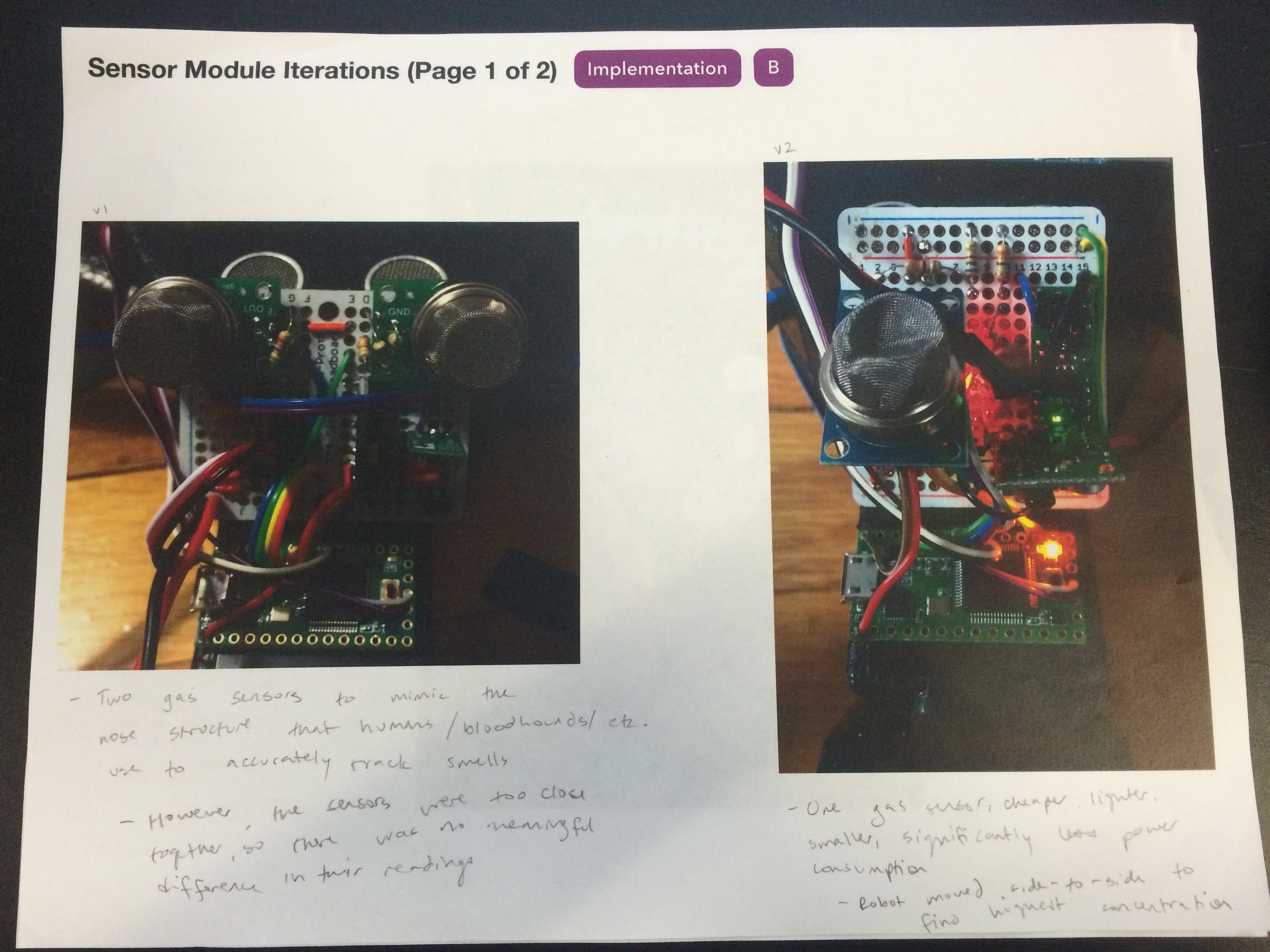
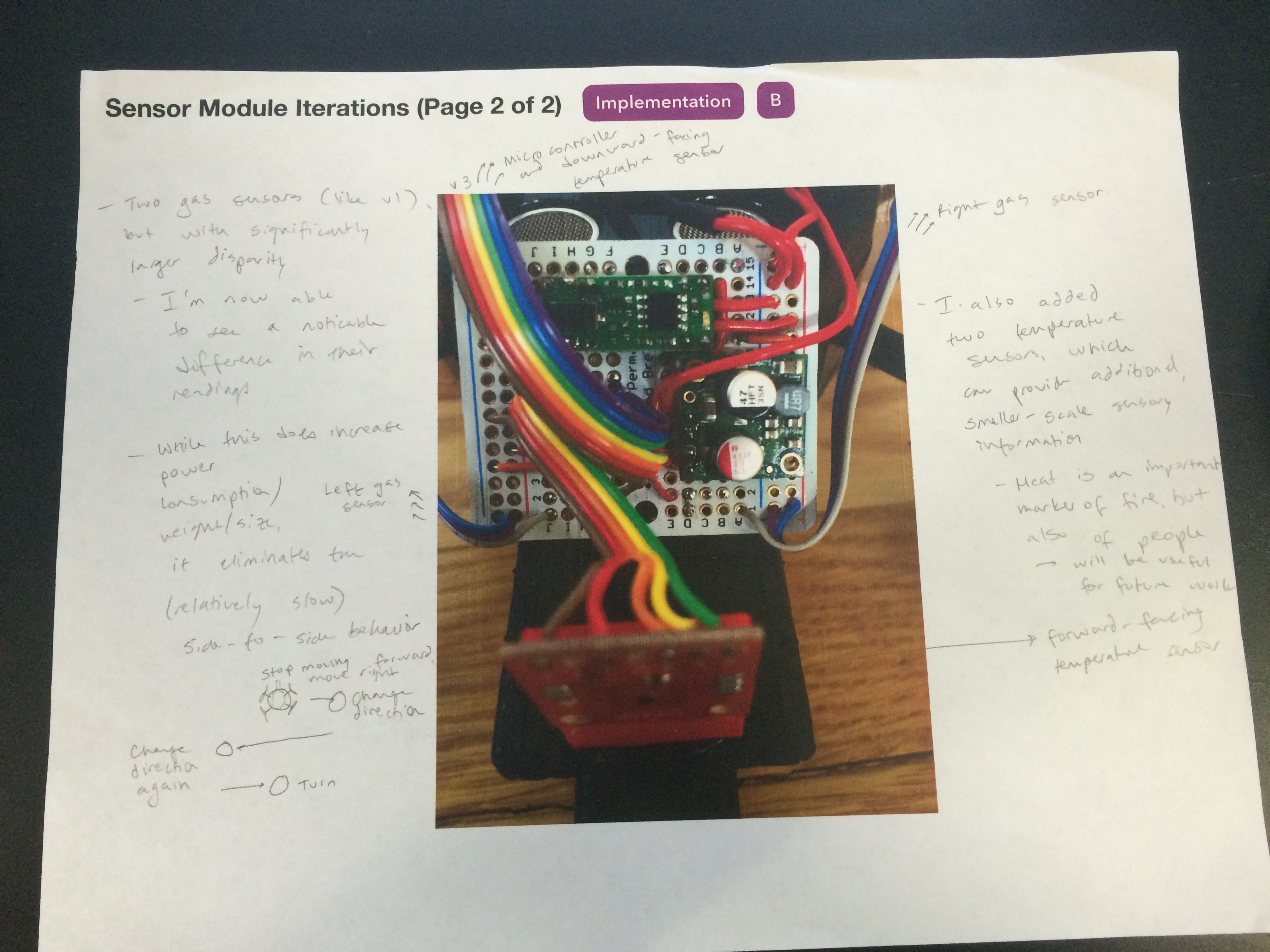
Designing a sensor module
I also needed to design a sensor module that could work with my navigation algorithm to locate fires. My notes are below:
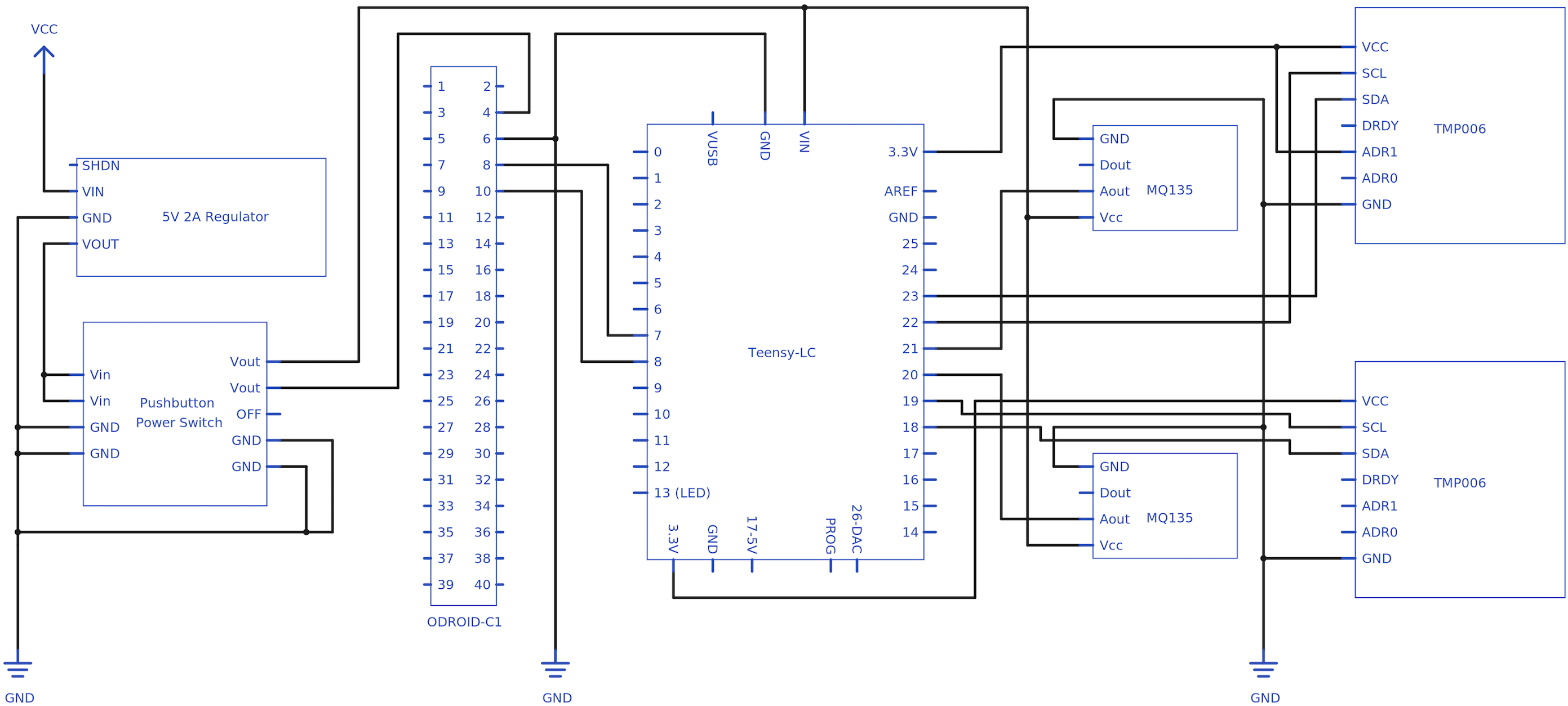
Also, here's a final schematic of my sensor module:
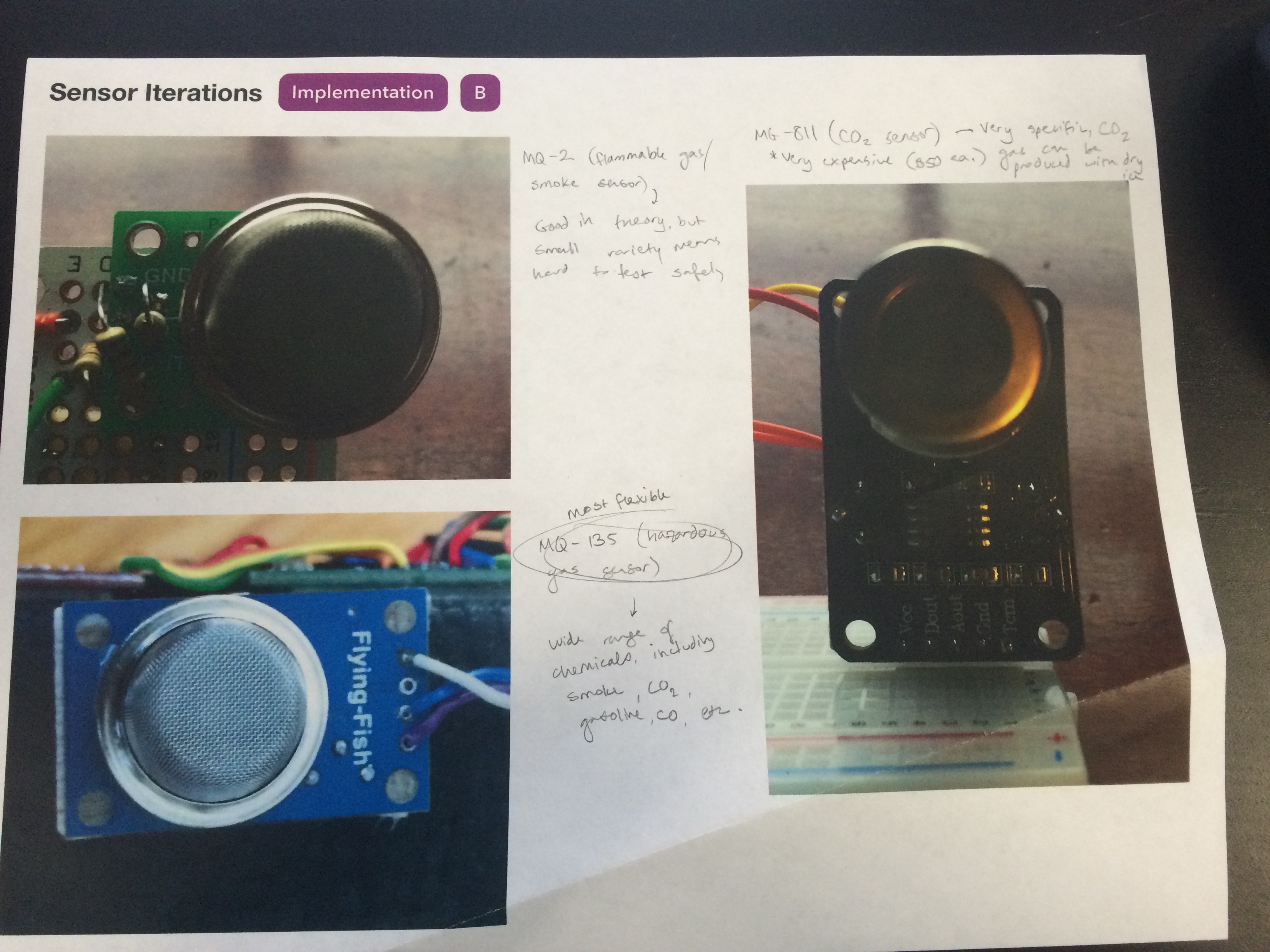
Selecting a specific gas sensor for fire detection
Here are my notes on this:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.