 deʃhipu
deʃhipuI recharged my batteries during the holiday break enough to actually work on this project a little bit more. One of the reasons I didn't touch it for over two years is that it's not really very convenient to program. I mean sure, it runs MicroPython, but to program it you either have to disconnect from the Internet and connect to its WiFi, or connect a USB to serial converter.
I realized that I can as well just make use of the progress I have made in the mean time, and use the #Servo Breakout for WeMos D1 Mini together with a D1 Mini clone:
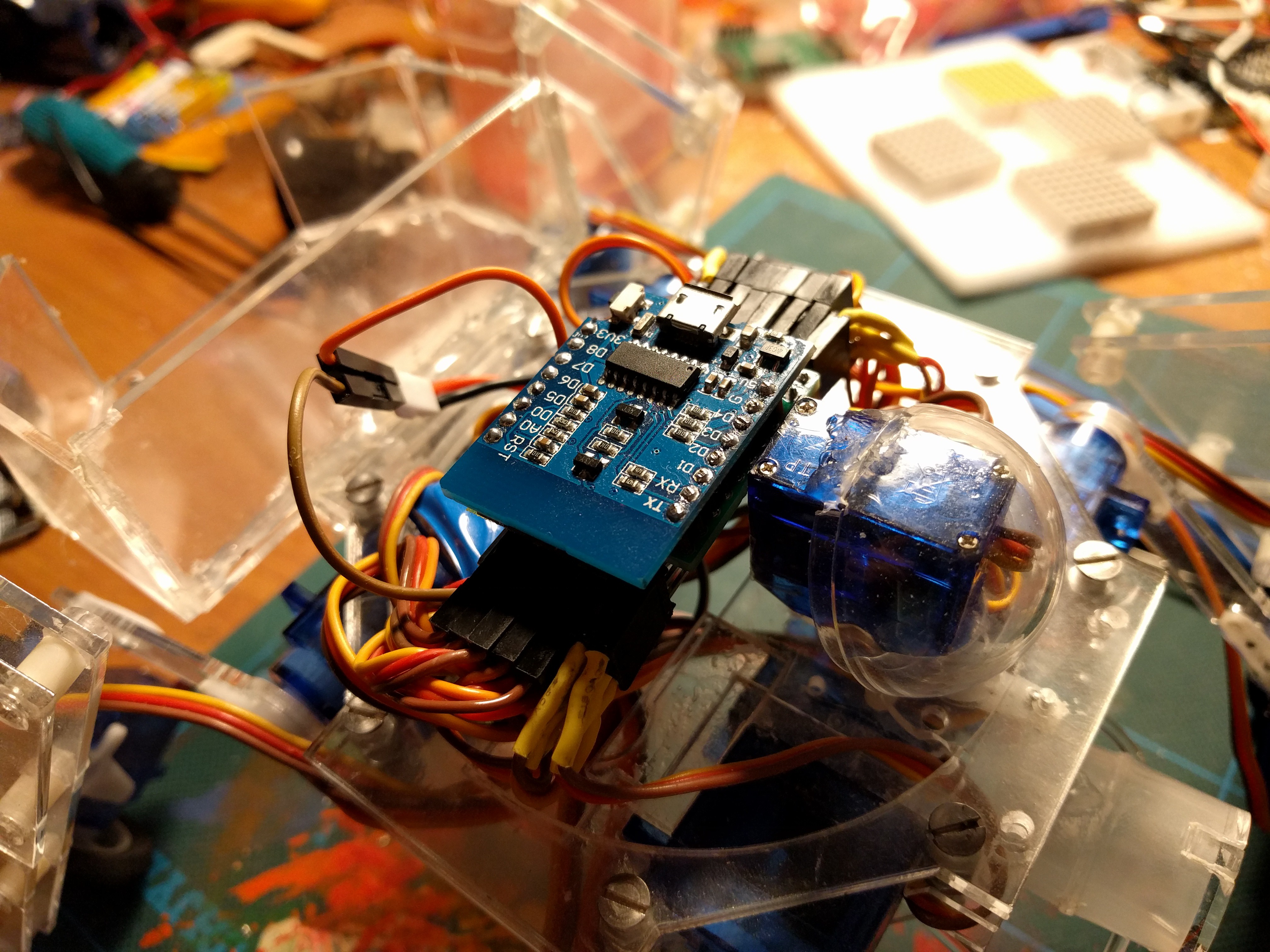
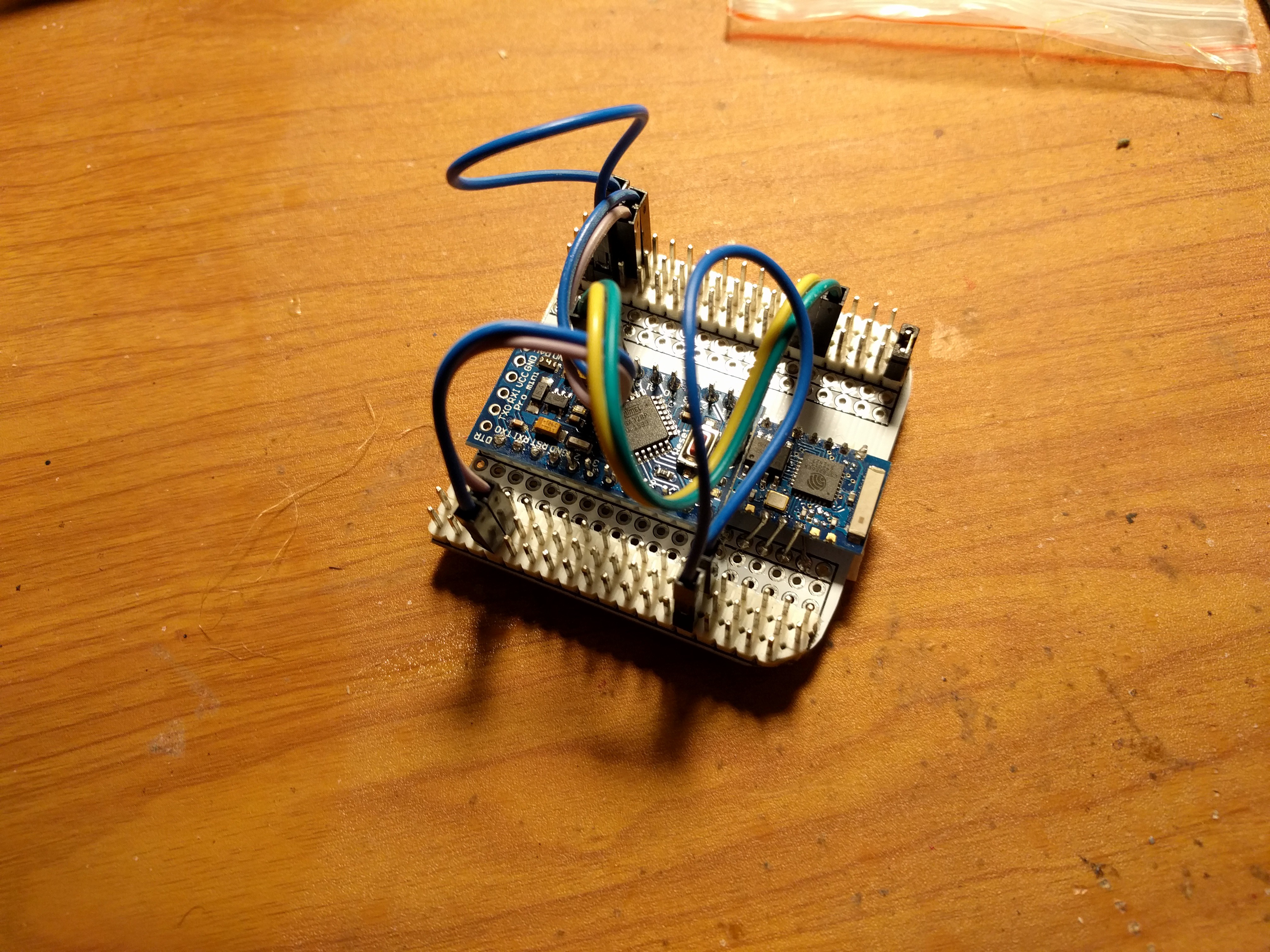
In place of the custom ESP-3 with a Pro Micro, that I had in there previously.
I will also need some kind of a controller for it, but that will probably be a separate project. In any case, the very next step now is to get it to actually walk and ride around.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.