 Göran Nordahl
Göran NordahlBy stripping down LPS v1.1 to a minimum, adding more advanced sensors (accelerometer, gyro, magnetometer and altimeter instead of just an accelerometer) and a LiPo charger, LPS Mini was born! It is hard making a much smaller board without compromising antenna performance. A nice little feature is that the entire board fits in a board edge connector making it possible to access all the I/O present on LPS v1.1 and ordinary Arduino Nano!
Schematic, assembly drawing and BOM:
http://www.loligo.se/navigation/LPS_mini_v1.0_150423.pdf
PCB animation:
http://www.loligo.se/navigation/LPS_mini_v1.0.WMV
Step by step transformation from LPS to LPS Mini:
http://www.loligo.se/LPS_mini/
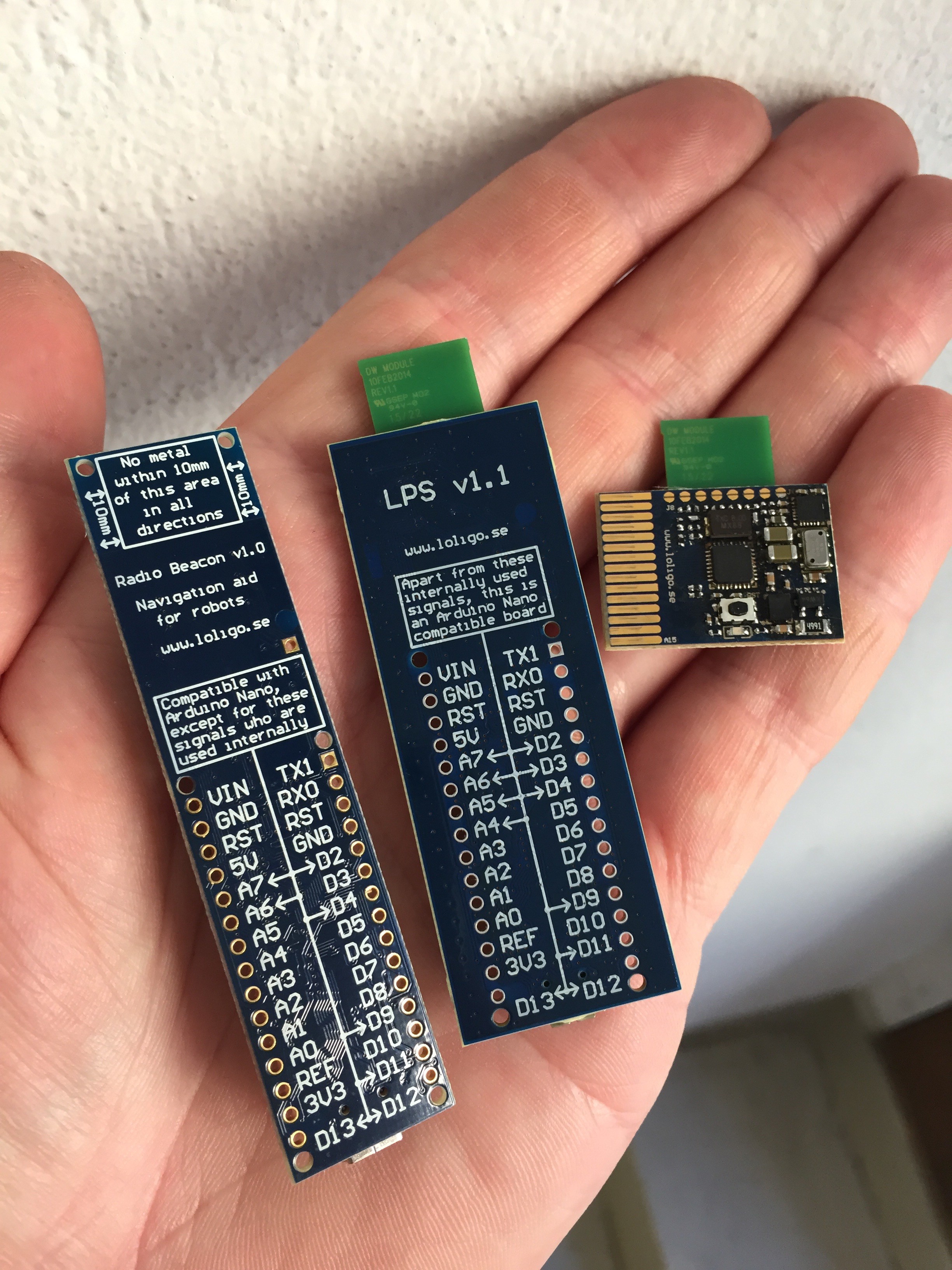
The two pictures below depict the development steps from RadioBeacon v1.0 via LPS v1.1 to LPS Mini v1.0:

LPS and LPS Mini are compatible. LPS boards can use LPS Mini as anchor/tag and the other way around. Except a different set of sensors the main difference is that LPS use 5V I/O level and runs at 16 MHz, while LPS Mini got 3.3V I/O and runs at 8 MHz.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.