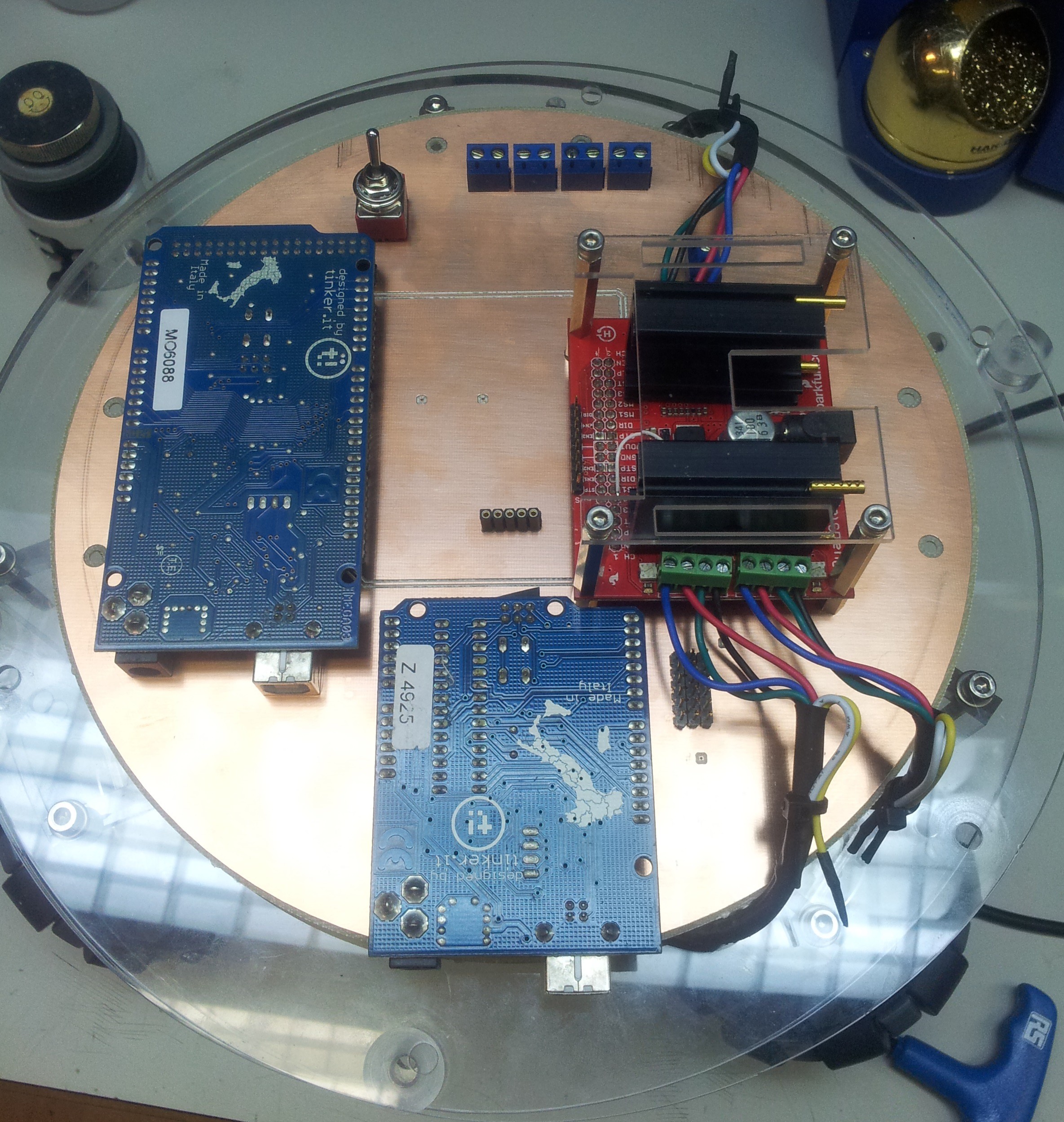
The controlling the stepper, we used the quadstepper board from Sparksfun. Heatsinks were placed on the controller chip to prevent overheating.

This is controlled solely by an Arduino Mega which generate the stepping pulses. An Arduino Mega was chosen because it has enough hardware timer for generating the stepping pulses. Another Arduino Uno serve to decode the PWM signal from an RC receiver. The decode signals are then sent to the Arduino Mega via I2C, so that the stepper motors can be remotely controller. An interface board is fabricated to tie all the components together. After alot of botching, the circuit finally works.


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.