 Les Hall
Les Hall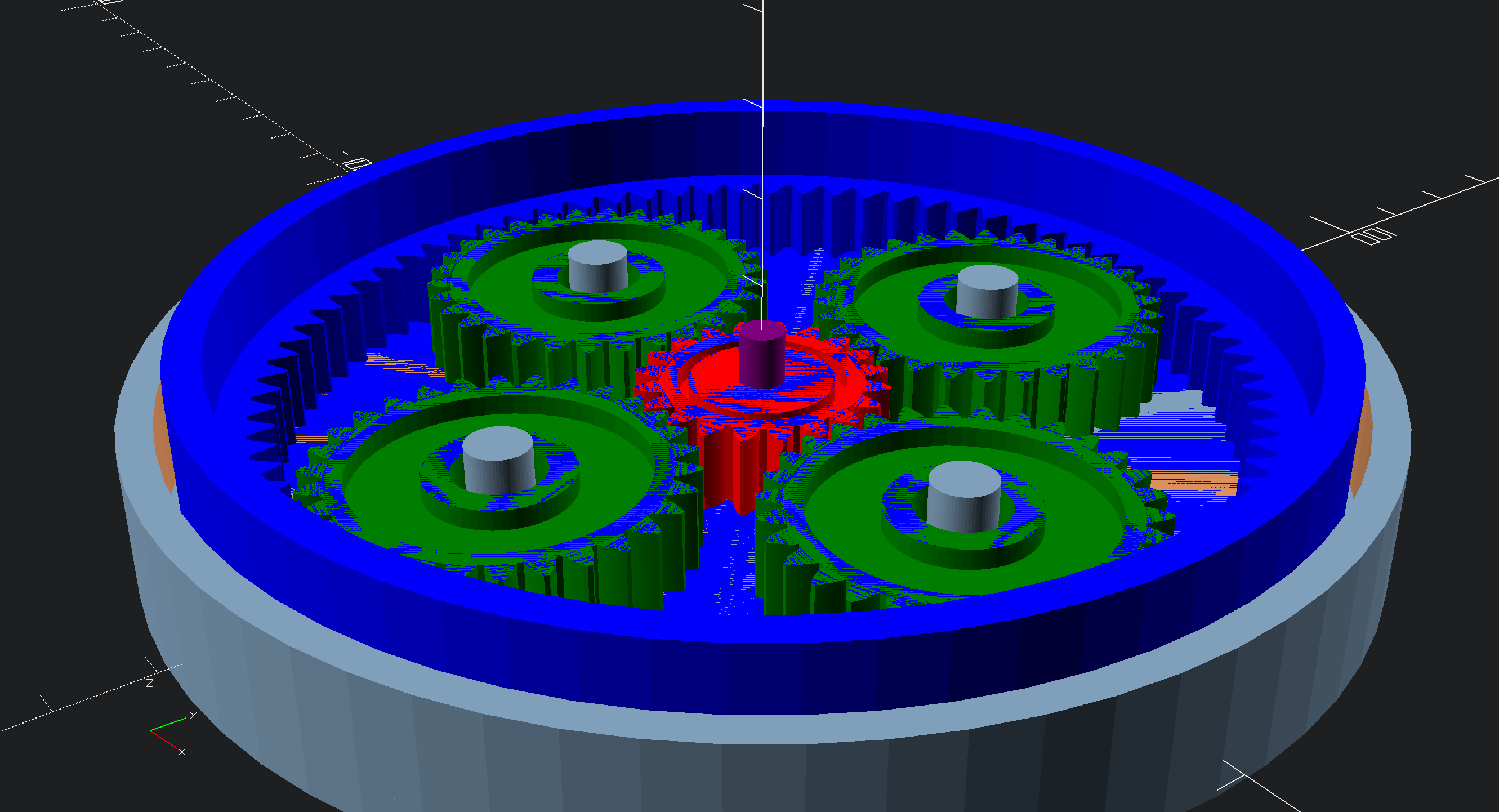
It was davedarko in the comments who suggested that we build a robotic arm and that's what we are doing. I tried to develop a rotary arm segment that could be repeated but when I showed it to someone with pretty good robotics knowledge he shot it down for a few good reasons.
So then I printed out a planetary gear system and mucked with it until it was 4:1 gear ratio. I thought about it and planned where to put the motor then added that to the OpenSCAD file. One thing led to another and next thing I knew I had a rotating base which I am printing out now.
I had to tweak the gear height and wall thickness to minimize the print time of course. I'm printing the base with the motor mount first, then the gears. I'll later CAD up a cover so the whole project has a PLA case and support rather than sit on on the motor for support, but that is another design!
Thanks to frankstripod for joining the project and davedarko for the original idea of what to build.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.