Bill Weiler
Bill Weiler-
Stanford Bookstore
03/26/2018 at 03:55 • 0 commentsI bought some books to get a background on math for speech recognition for the robot.
![]()
![]()
-
Figured out problem
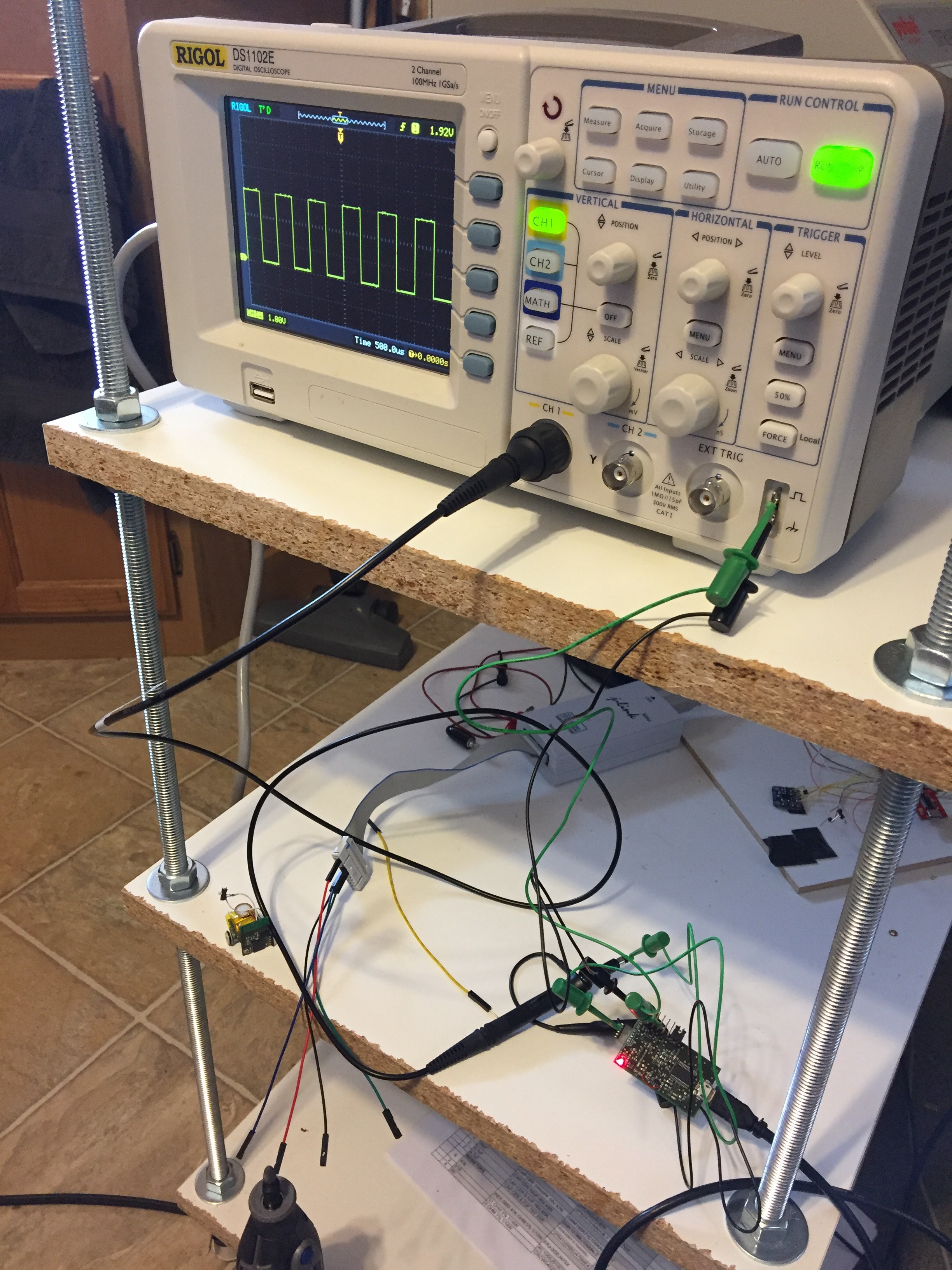
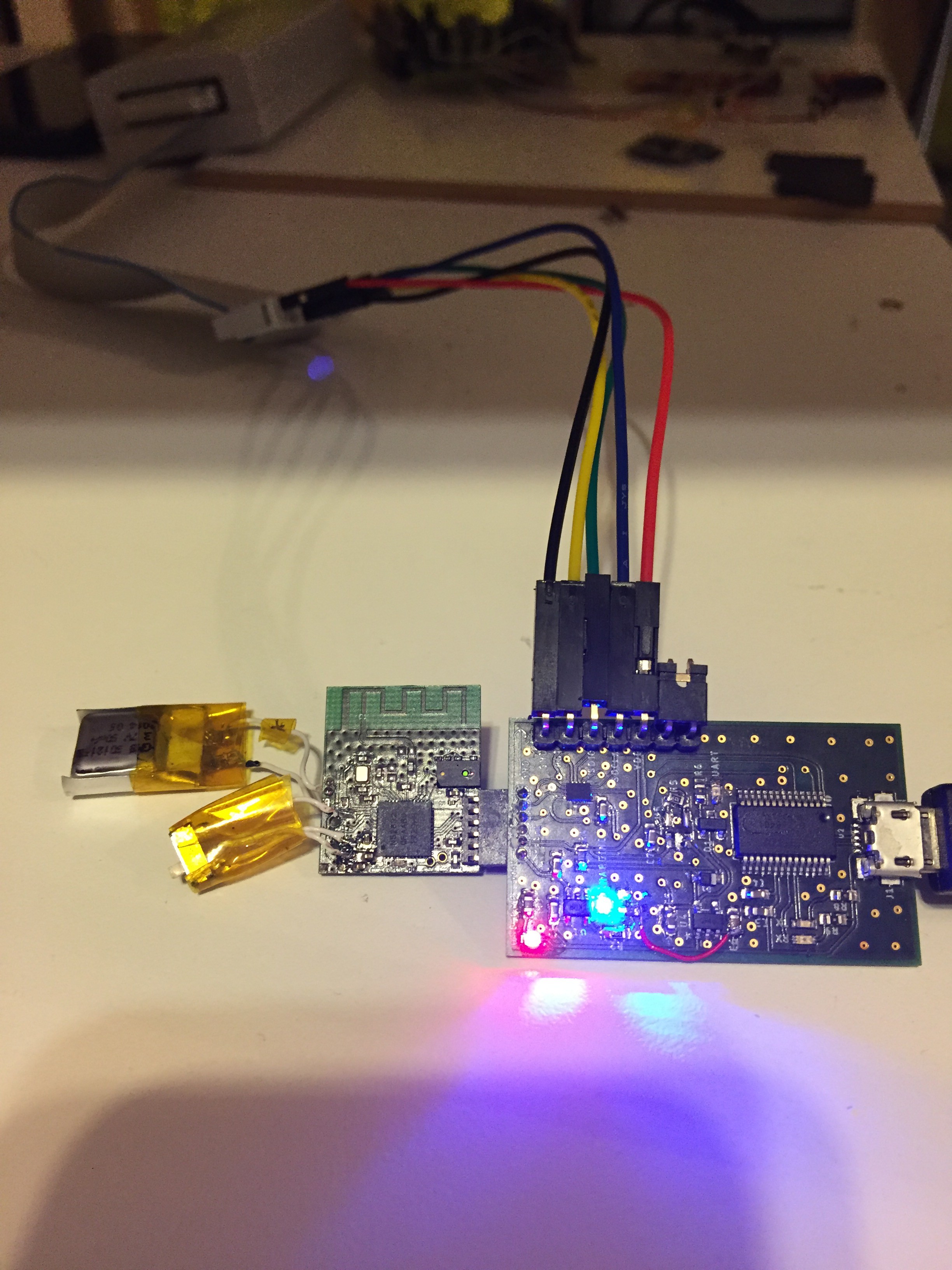
03/23/2018 at 23:46 • 0 commentsIt wasn't the robot board I just made, it was a signal on the companion board. I found by injecting a signal through the analog switch and seeing if it came out, and the programming clock (swclk) wasn't getting through. I used the calibration port on my scope as a signal generator. I then instrumented all 3 signals, swdio, reset and swclk. I fixed it by coating the analog switch with flux and touching it all around with the soldering iron (the switch is a QFN). The robot board is all hacked up from rework, so I think I'll just make a new one (tomorrow). For today I am in need of some fun after all that stress. Here is a photo of swclk finally working. It is kind of stressful. I have to spin the robot board, but I have to test everything on the old one to catch all the bugs, but it pushes the date out further and further the more time I spend debugging.
![]()
-
Worst day of my life
03/23/2018 at 06:56 • 0 commentsI made my new design and found some mistakes, nothing too bad, but I found I routed the switch wrong. I fixed it by running wires. Unfortunately, the microcontroller won't recognize through the j-link. I checked a bunch of things, but don't know why. I may have to build another one.
![]()
-
Went to a meetup - it was a panel on mitigating hardware risks
03/23/2018 at 06:49 • 0 commentsThis was a meetup in Mountain View. I thought it was great. Super informative.
![]()
-
Some updates (in case people want an update)
03/22/2018 at 05:16 • 0 commentsI printed out the Nordic Softdevice (BLE stack) spec at PostalAnnex. It is about 103 pages. I am about 20 pages in. Some gotchas in there for sure, like the softdevice steals timer0 and lots of other peripherals. There is some crazy stuff in there, like it takes over interrupts. The coolest thing is it can be multiprotocol. I can run more than one softdevice at a time. Wow, that would be nuts. I could talk BLE to central (cellphone) then switch to ANT to mesh with other robots.
Also, I printed out my BOMs and inventoried my parts. I went to a meetup which was a panel of 5 space startups. It definitely gives you a "it's going to happen" feeling.
I did lots of web research. Hackaday sent out a mass mail and mentioned my robot, but misstated it has pcbs on all sides. It has 2 pcbs.
Makershed offered to give me space at Makerfaire in May, they definitely they want to do retail in a big way. I don't know if I will be ready.
Bill
-
Parts from Digikey and PCB arrive tomorrow
03/21/2018 at 21:58 • 0 commentsIt can be hard containing excitement.
-
Nordic Example Code
03/21/2018 at 18:20 • 0 commentsThis is kind of disappointing, but the Nordic SDK example programs are too coupled. What I mean is I was looking for a quick and dirty way to get the BLE command interface to the cellphone done. I don't think that is possible now. I think I have to dig into their softdevice API documentation. The softdevice is their BLE stack, which only comes in binary form. This really slows things down. The good news, is when there is bugs, I can fix them much faster with insight into the softdevice. I hadn't counted on this time sink though.
-
Mainboard PCB's arrive, also motor mounts and PCB stencil frames
03/21/2018 at 08:50 • 0 commentsSome crazy stuff happened. My first microphone has a serial i2s (inter sound) interface, but the Nordic datasheet didn't have that peripheral, so in this spin, I use a PDM interface microphone. Well, I downloaded the Nordic datasheet from Nordic Site, and it is v1.4. The I had before was v1.1 and no i2s, and there is an i2s peripheral in v1.4. Awww, crap. It's all good though because I save a pin on the mainboard/daughterboard connector. i2s is 3 lines and PDM can be 2. Oh, well, life goes on.
Here is a photo of the 3D printed motor mounts, a 3D printed stencil frame (or PCB holder) and the e-clips I wanted to use to hold the wheel on, and a motor. The e-clips are 0.8 ID and I couldn't push them on the 1mm shaft, but my next motor can have 0.2mm groves for the e-clips. The bag of e-clips looks spookily like ants.
![]()
Also, I order pollywogs through the mail for my son. It is soo weird ordering live things in the mail, but I guess it's ok now. The pollywogs are kind of big. I hope they don't turn into giant frogs that cost a fortune to feed, or worse eat my aquarium fish.
![]()
-
What is wrong with comparator circuit
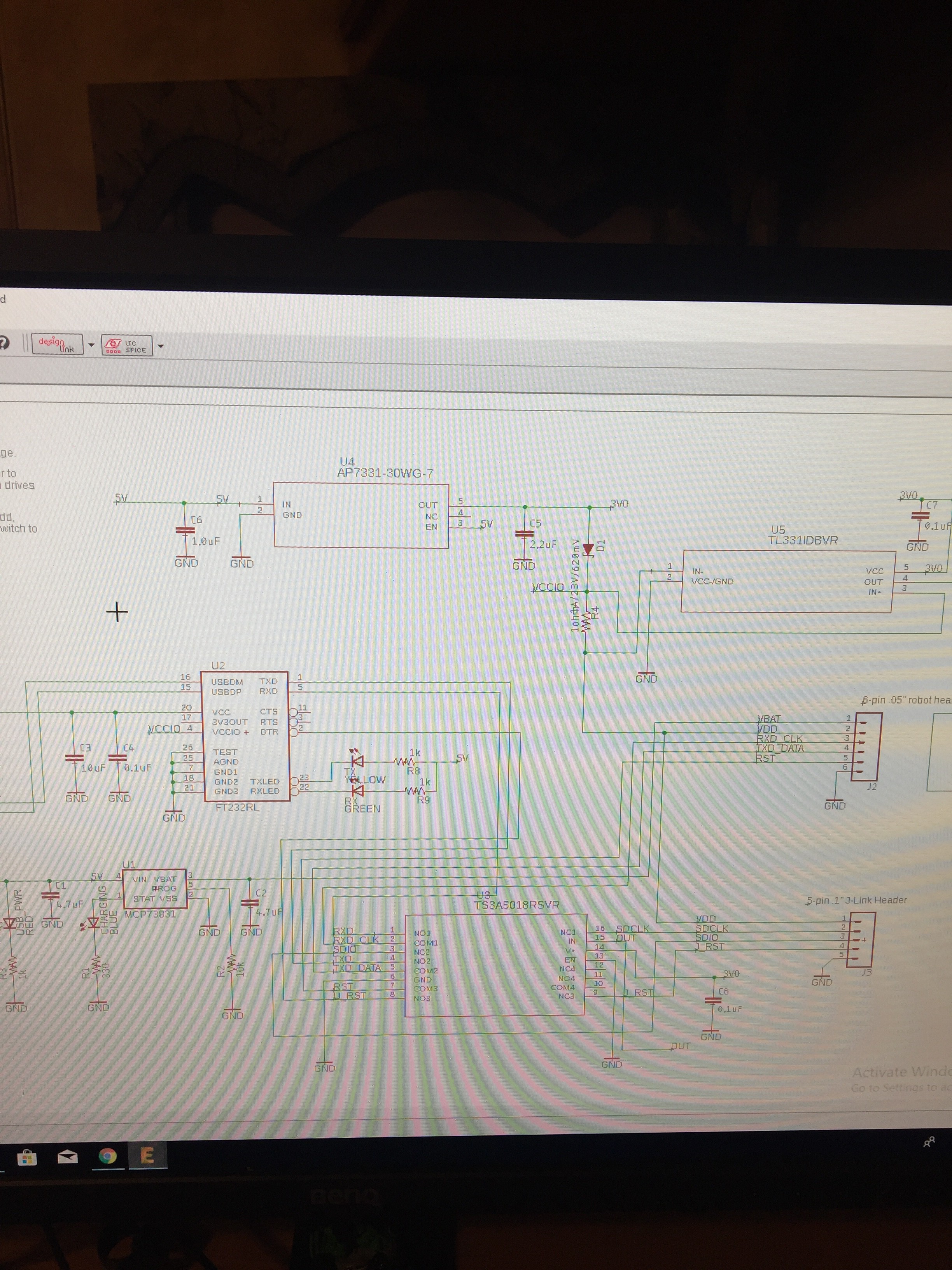
03/19/2018 at 06:14 • 0 commentsLooking closer at the TI TL331 datasheet, I see I was fooled into thinking the offset voltage was 2mV. Looking closer it is this funny formula of VDD-1.5V. I think what it means is IN- and IN+ to the comparator, have to differ by more than (my voltage is 3V) 3-1.5=1.5V. Wow, I will never get that across a 1ohm resistor, I would need amps of current, not milliamps.
Also, I think I have to deal with something, because I am self-taught PCB designer, my designs don't follow standards close enough. When I post to Stackexchange asking questions, I get dinged pretty hard for not following conventions in my schematics. Should be an easy thing to learn and fix, but it is building the habits that are hard. Also, I have to follow IPC standards. If I don't, I will confuse my suppliers, and spell doom.
Here is the schematic, the guy who answered said is was totally confusing because I didn't follow standards, and not using a preferred comparator symbol threw him.
Here is a link to Stackexchange question:
Here is the schematic:
![]()
Doom .... doom....dooooom!
-
Video of companion board showing features
03/19/2018 at 06:04 • 0 commentsHere is a short video of companion board for Project Johnson Tiny Robot Open Hardware Contest.