 The Big One
The Big OneLast night we finished cutting the new tibias from 1/4" MDF, assembled everything, made the required modifications to the software, and finally Stubby version 2 took his first steps.
First, a bit of comparison between version 1 and version 2.
Version 1 was a very simple design, where the legs were directly connected to the servos. This made for simple construction and programming, but since we are using the cheapest servos known to man, it made the robot very sensitive to weight constraints.
Even at a total mass of 400g (including batteries, servos, frame, etc), you could hear the servos 'buzzing', indicating that it was right on the border of being able to work, during each step. Furthermore it was impossible to give him longer legs (since longer legs would require more torque), which in turn severely limited the maximum walking speed (but which earned him the appellation of 'Stubby').
A sane individual would simply buy stronger servos. Unfortunately for all involved parties, I am not completely sane.
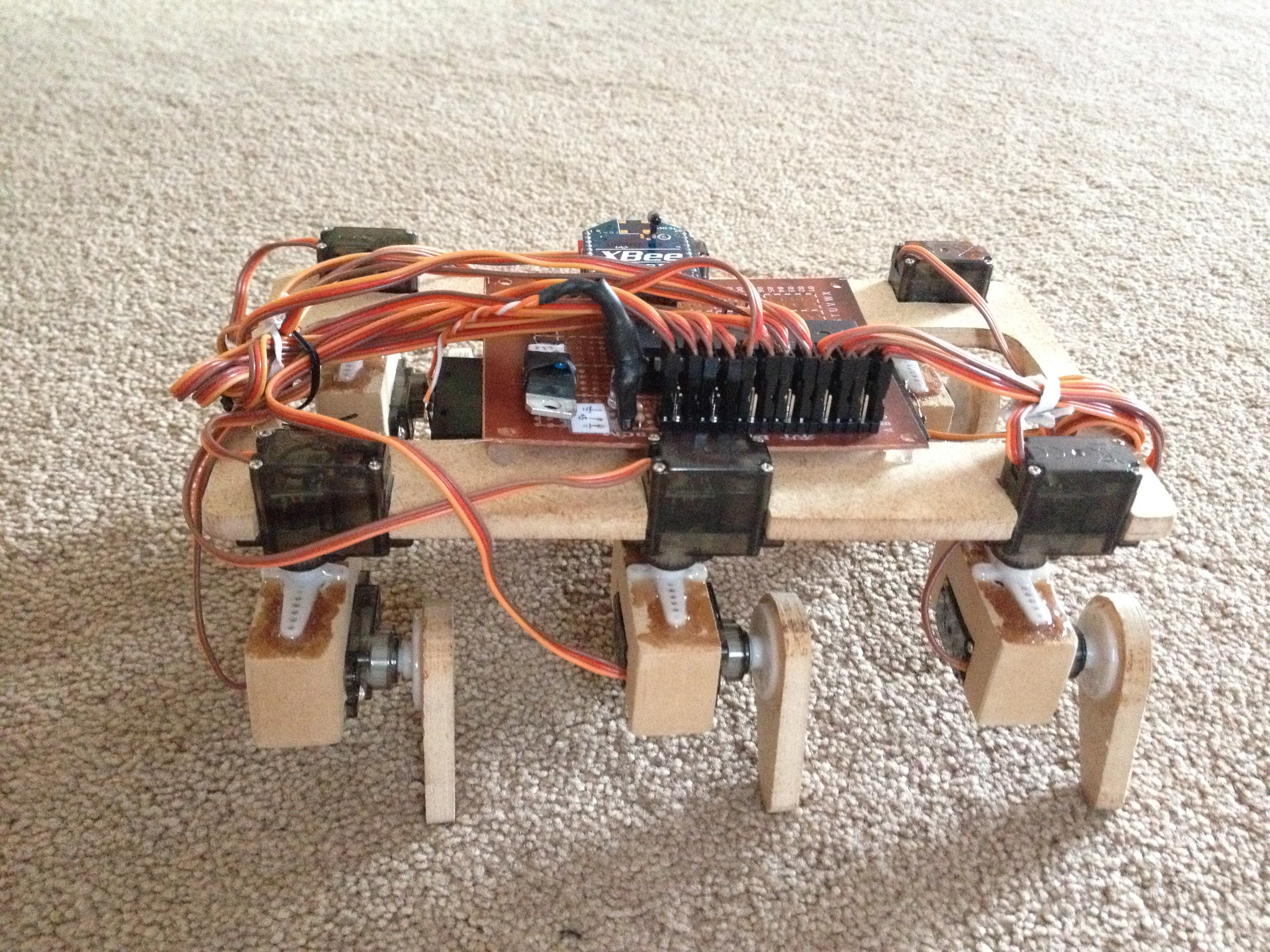
I decided to try to use what little I remember from Grade 7 science class to design a frame that uses mechanical advantage to allow for longer legs and more control that you can get from directly connected servos. I think that I have done fairly well in this respect. Below is Stubby in his newest incarnation:
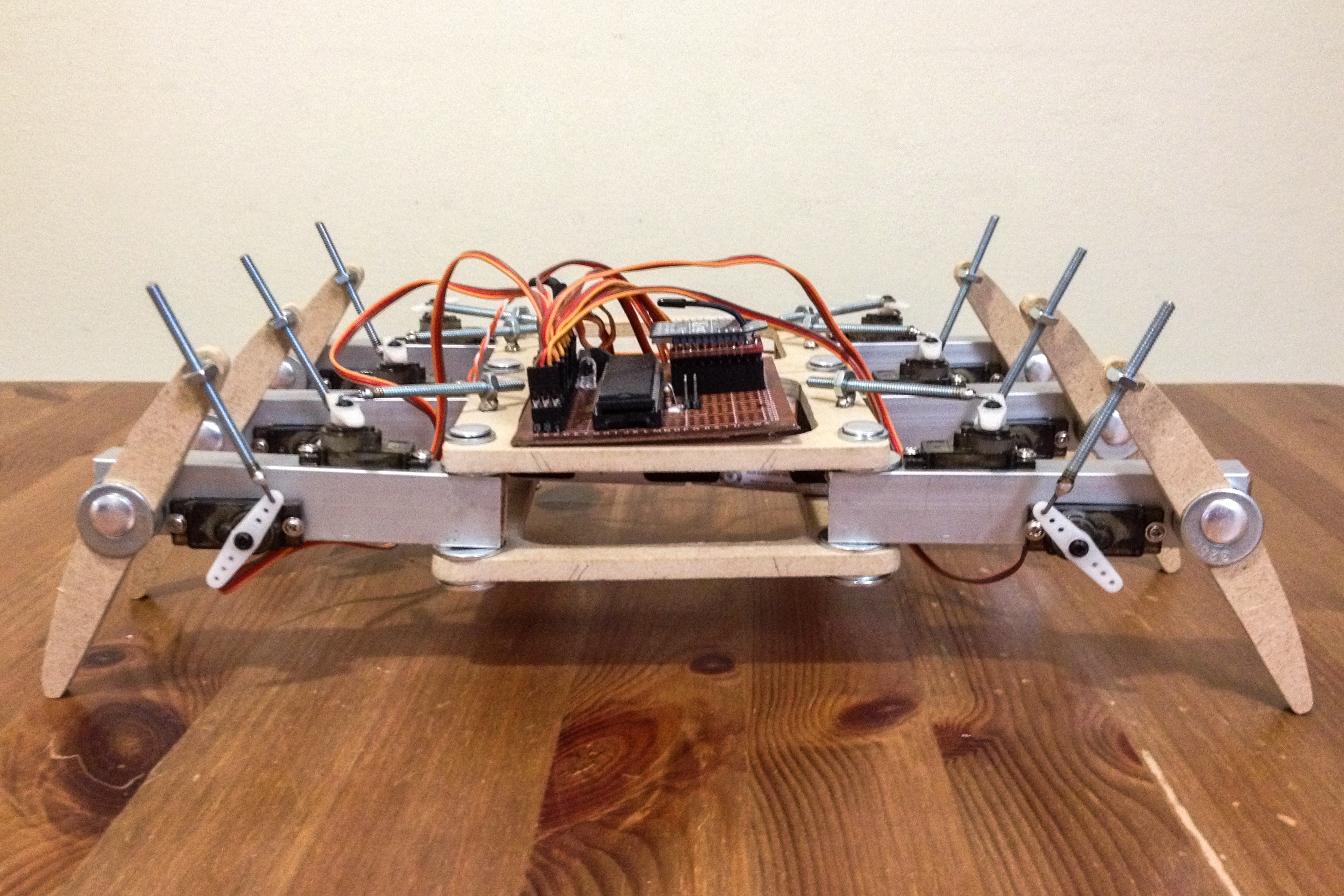
As you can see, each servo is connected to a push rod; these push rods are connected to the chassis / legs in such a way as to reduce the torque needed for movement, using basic principles of levers.
It actually works fairly well. There are a few things that need improvement:
1) I don't like how the Chicago bolts are working for the leg hinges: I think I will replace them with regular bolts, which can be tightened around the frame and leave the legs moving independently. Currently the top and bottom portions of the frame have a bit of 'wiggle' room, which makes the coxa joints sloppier than I would like. Likewise I could probably do the same thing to the tibia joints to make for a bit less slop than we are seeing now.
2) I think the tibias need to have more movement; given how long the top parts are, 180 degrees of movement on the servos provides about 25 or 30 degrees of lift, which is not quite sufficient for walking on carpet or soft surfaces. Perhaps I can design some sort of cam which will provide more torque / less speed when first lifting the tibias (where the legs would be touching the floor and may encounter resistance), but then switches to more speed once the leg has been lifted a bit? I don't really know about cam design, so if anyone has any ideas please let me know.
Despite the challenges, I think that this is a great start.
A video of Stubby walking can be seen here.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.