 DrYerzinia
DrYerziniaThis time around I have some more CAD for the BB8. Testing of the new motors with the folding propellers. And the resolution of some 3D printing problems as well as a working cover hinge. Enjoy.

The setup for measuring the motor stats is fairly simple. I was going to measure RPM but the hall effect sensor kept getting blown off the motor. Two multimeters measure the voltage and current comming from the battery. The Fluke 87 is measuring the voltage across a 1.5 mOhm shunt resistor made on a PCB from a fixed width/length trace and measured using a known restive load at measured voltage. This gives a little over 1 mV per amp. The thrust is measured with a scale.

Below I have a comparison of the chart from the manufacturer and the measurements I made. I'm comparing against the 17 inch propeller cause that's what I got.
I maxed out my thrust at 4.3 kG or about the same as their 85% thrust test. I suspect this is because of the voltage sag of my battery down 3.5v from its unloaded value. If you divide there test Wattage measurements vs current you get a steady 24 volts which I did not have. Going up to a 7S battery or potentially a higher capacity / C rating battery is should allow me to reach their maximum figures.
My goal weights for BB8 are as follows. For just the flight system plus the frame and doors I want to end up at 20 lbs. That would put my needed thrust to weight ratio at about 1:2 running in the 55% to 60% throttle range. We have decent efficiency there of about 6.5 g/W.
However for the flight system plus the rolling drive system and the head I'm aiming for 30lb's. That puts me in a 1:1.5 thrust to weight ratio, 75% full throttle. We loose about 20% efficiency at 5.5 g/W in that area.
Hopefully with a decent battery we can get a 5-10 minute flight time. No way we get much above that.

Here is a shot of the latest OpenSCAD design file. You can see I designed in the hinging mechanism and motor mount. I've roughed in the servos but I don't want to design the mounts till I have them to measure. The door hinging mechanism has been added as well as braces along the edges and middle to help it close properly along with rounding of the back edge of the door.
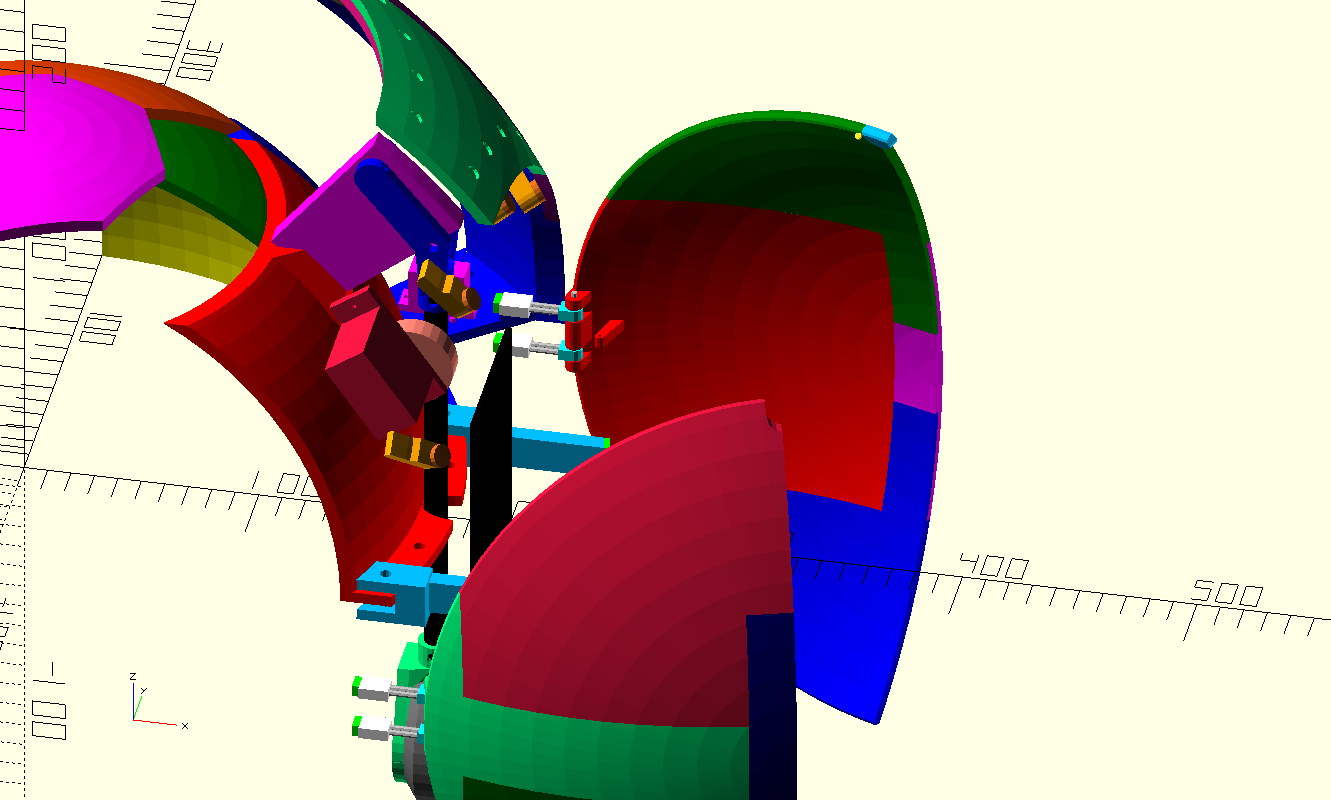
Here you can see the hinge mechanism. Its simply a slide combined with a hinge. A servo arm pushes it out past the edge where it can rotate out to 70 degrees open. Braces along the edge of the door and from the middle of the door will help it close flush. I also needed to round the back edge of the door so it doesn't get caught on the edge of the body closing.


To facilitate printing with the lower temperature I built a headed build chamber for my LulzBot Mini. This also had the added benefit of reducing cracking and helping bed adhesion as the whole part shrunk less overall during the print.
That's all for this week. I should have some fun updates in 2 weeks. Half of the frame should be printed by then and I will have the servos so I can build and test the door mechanism and the motor lifter. Also I should have done some design work on the custom ESC to properly fold the propellers.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.