 Rob
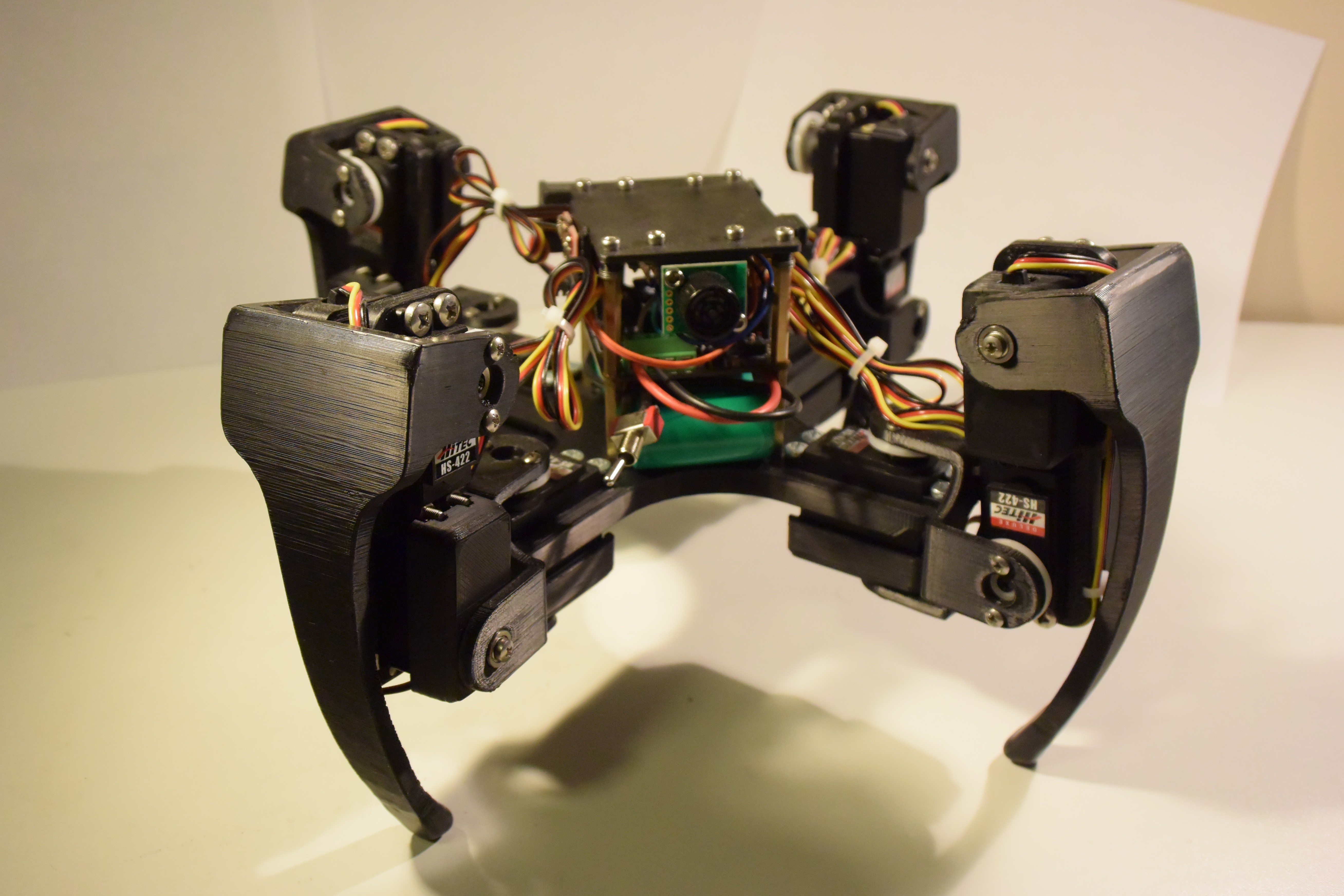
RobHey everyone, it's been some time since my last log! School's been crazy and I haven't had a great amount of time to record everything. Since my last log, I've made a some big changes to Quadrup3D to remove any tether to a computer and to make it completely autonomous. I managed to snag a Raspberry Pi Zero in January and I am now using a Pi onboard to control the robot instead of the serial Bluetooth module. The Pi Zero is a great choice for this project as it's small, low cost and low power. The Pi Zero is equipped with a USB WiFi adapter to broadcast it's own ad-hoc network, this works really well as I am able to SSH into Quadrup3D to upload code and I hope to be able to transmit telemetry data from the robot to my laptop in the future! I've also a small custom Pi hat with an Adafruit BNO055 9-DOF sensor to allow Quadrup3D to know it's orientation in 3D space. The hat will also be able to interface with the mounted ultrasonic sensor. Furthermore I've added a sparkfun LiPo charger with an 18650 LiPo cell for powering the Pi and the servo controller. Stay tuned, more updates are coming!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.