 Tim Wilkinson
Tim WilkinsonThe ROV will have 12 thrusters. Yes, I realize that's quite a lot and probably overkill, but one of the primary goals is 3D maneuverability. For that I need lots of different thrusters. I don't expect to use them all at once, but it seemed easier to have more thrusters than to provide some mechanism to change the direction of thrust.
When I started investigating options, I was rather surprised to discover that it was possible to run brushless motors in water! At the time I didn't understand what a brushless motor actually was, but after a little research I understand why it works. I'll leave the selection of motors for later and for now just concentrate on the ESC (Electronic Speed Controller). I investigated a few ESCs, including the Turnigy TrackStar 25A Car ESC, the HobbyKing Brushless Car ESC 30A w/ Reverse and the HobbyKing Brushess Car ESC 10A w/ Reverse. I selected the last of these because it (a) worked in my tests, (b) had enough power, and (c) was cheap.
Because I need 12 of these, I decided to make a dedicated PCB; partly to organize everything, and partly to simplify the power and control signals. The board also contains a PCA9685 I2C PWM controller which allows a single I2C to set the speed and direction of each ESC.
The bare and populate PCB is shown below:
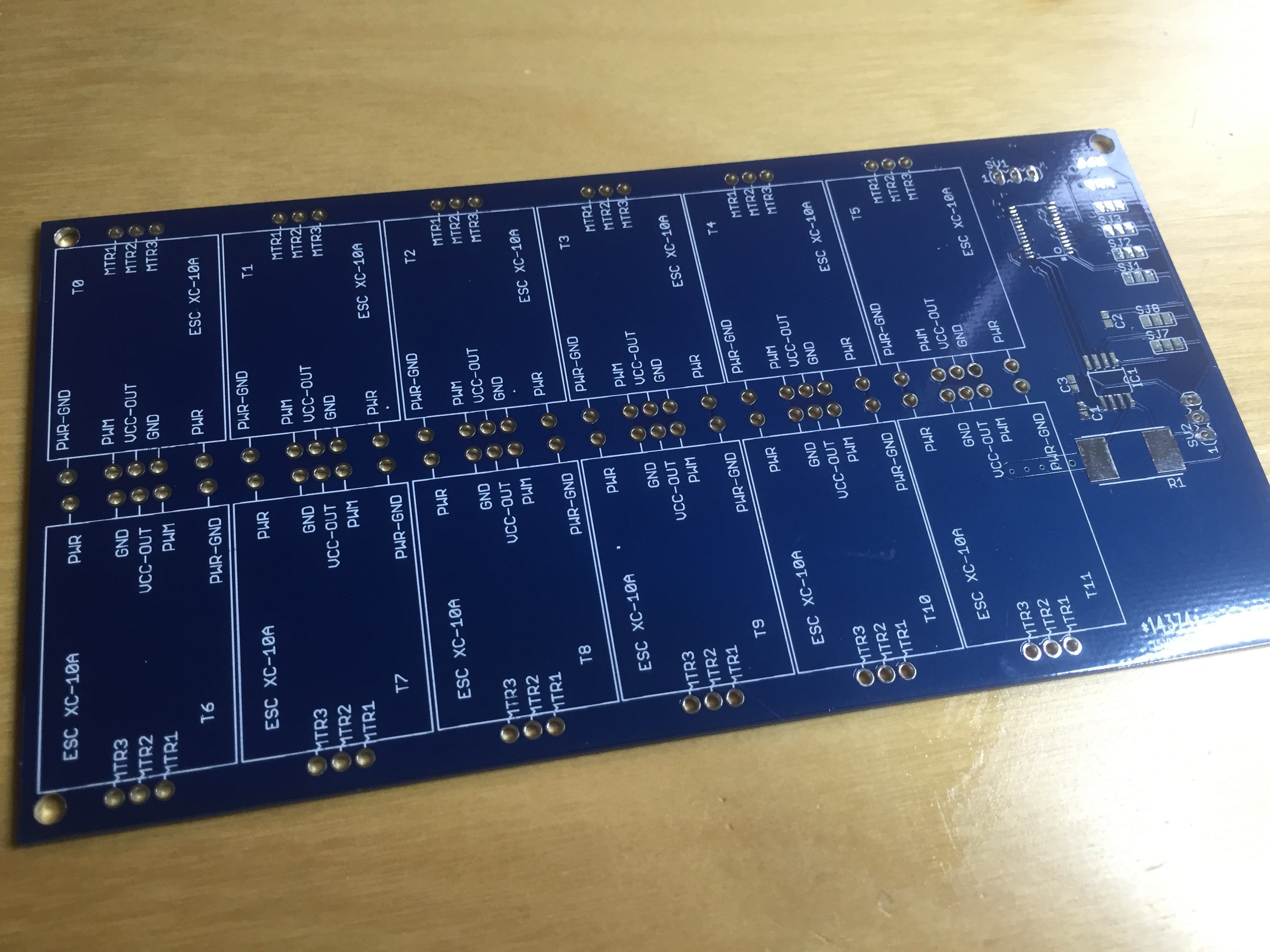

The missing chip on the middle-right was a current monitor, but I decided to move this functionality to the main board.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.