 Tim Wilkinson
Tim WilkinsonHere are the first cockpit photos:
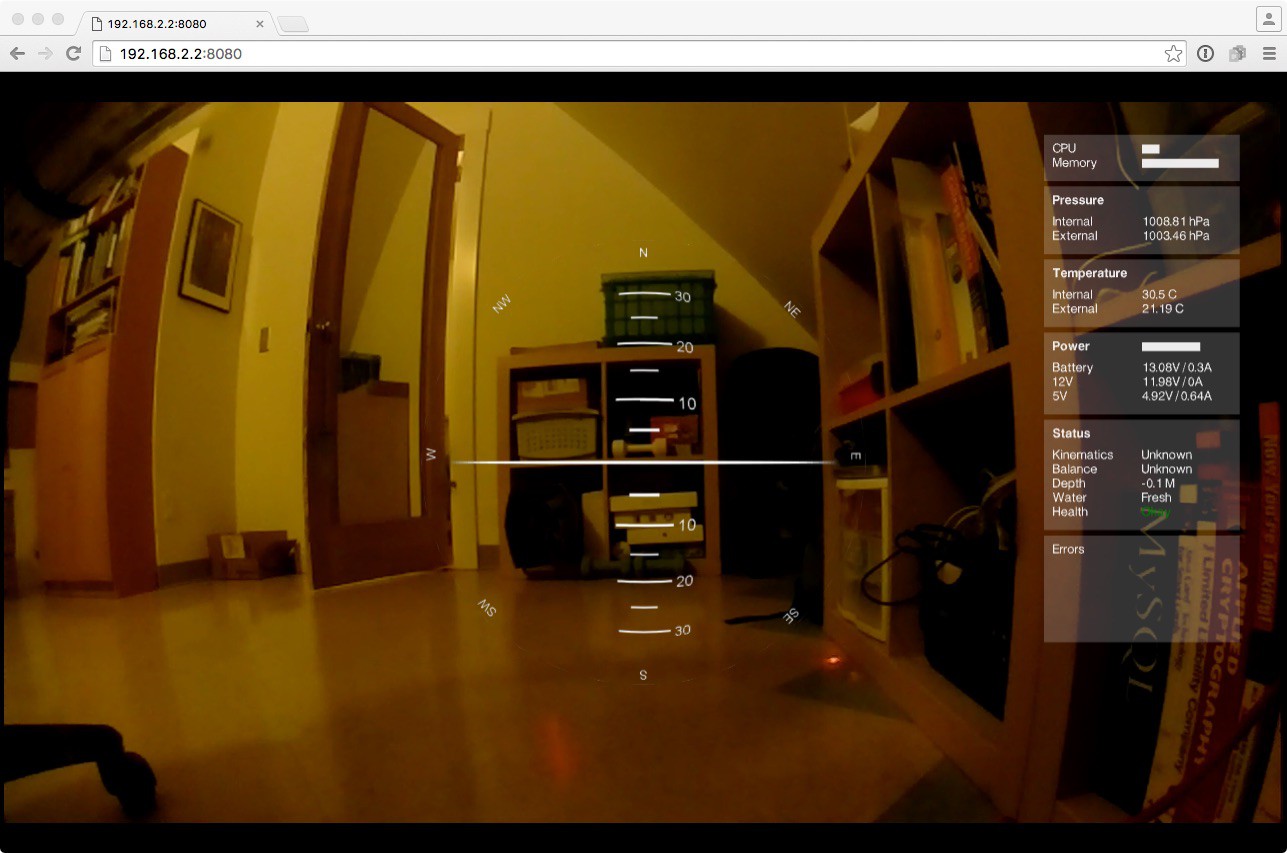
The cockpit is currently in 'mono' mode (i.e. not using the stereo camera system) ... which is kind of obvious since there's only one image. On the right you can see various pieces of information:
- Current CPU and memory utilization
- Internal (inside the air tight hull) and external (the water) pressures
- Internal (inside the hull) and external (the water) temperatures
- Power voltage levels and current current consumption of the 3 voltage sources
- Status of the craft
- Kinematics is the state of the IMU - calibrated when in use
- Balance on/off - the automated balancing system which keeps the craft level and steady
- Depth - the depth of the craft calculated based on the external pressure and the water density
- Water - fresh or salt water environment
- Health - general health of the craft
- Errors displays any error message logged on the craft
The center instrument is the artificial horizon and compass. The artificial horizon (the middle bit) shows the current pitch and roll of the craft. The compass (around the edge) show the direction the craft is facing.
All the instrumentation is built using "three.js", a Javascript based 3d modeling library which runs in the browser. I chose this approach because it allows me to easy switch the 3D mode. You can see that below (although this still needs some tuning because I've not actually plugged in my Rift to check everything):
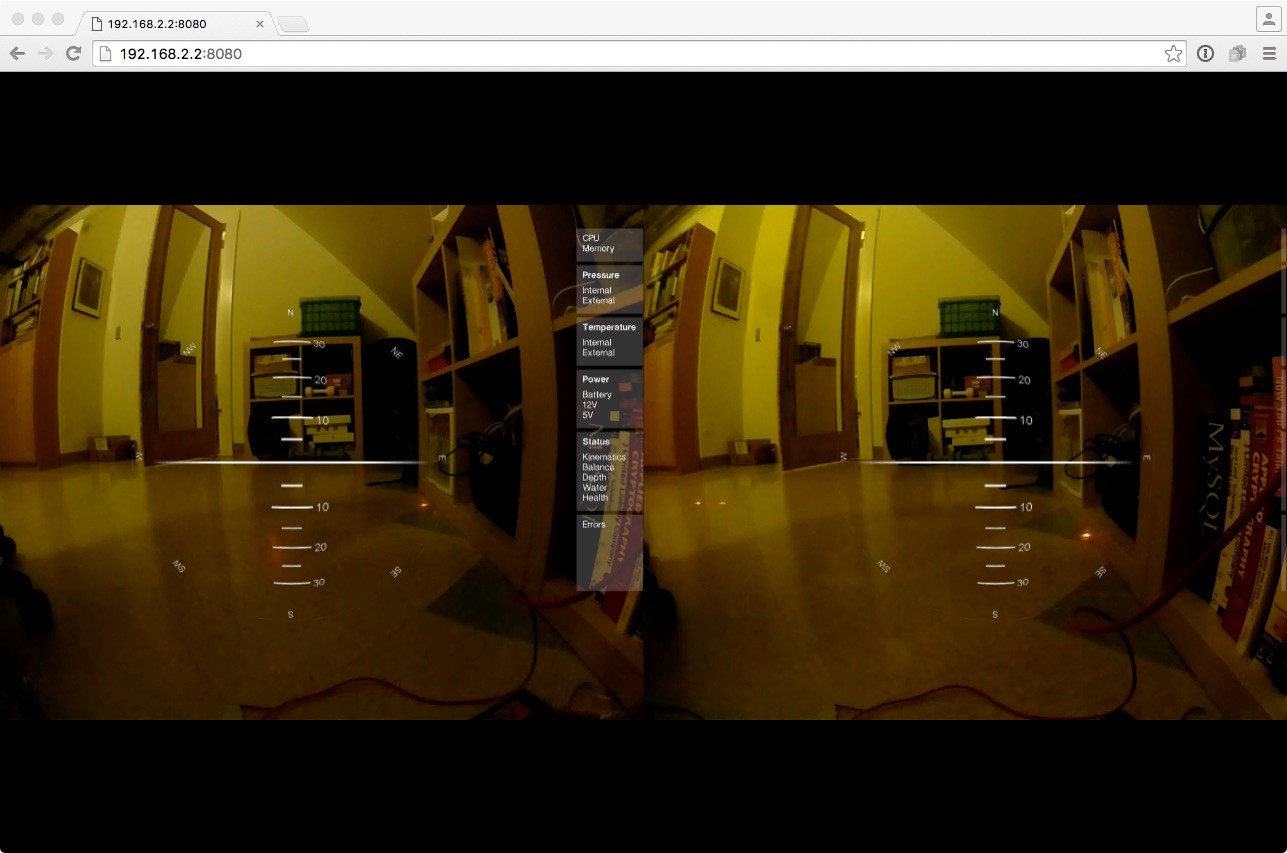
In this image two cameras are being used while three.js is duplicating the instruments based on their positions in 3d space.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.