 Tim Wilkinson
Tim WilkinsonI've been struggling for some time with the thrusters causing the ESCs to reset. I've previously diagnosed this issue to various things, including poor power supply to the thrusters, a floating earth, a need for more decoupling on the controller board, and restricting the absolute power consumption of all the thrusters. But, while all these things have seemed to help a bit, nothing has made the issue go away completely.
While testing the new thruster design on my bench the other day using a simple servo tester, I was surprised to see I could still make the ESC reset even though everything was being run from a bench supply. This got me wondered - could the motors themselves be the problem? I chose cheap-o motors when I started out, partly because I knew they'd fail over time and so didn't want to spend a lot of money on them, and partly to see what I could get away with. Maybe I was being too cheap? So I've decided to upgrade the motors to something a little better.

I chose the NTM 28-30S 800kV (available from Hobby King for $10 or from Amazon if you want to spend twice the money but don't want to wait); more expensive but hardly bank breaking. These are very similar in size to the old motors, but I still needed to tweak the thruster housings a little to make them fit. One big plus was the ability to bolt the props onto the motor rather than relying on a friction fit.
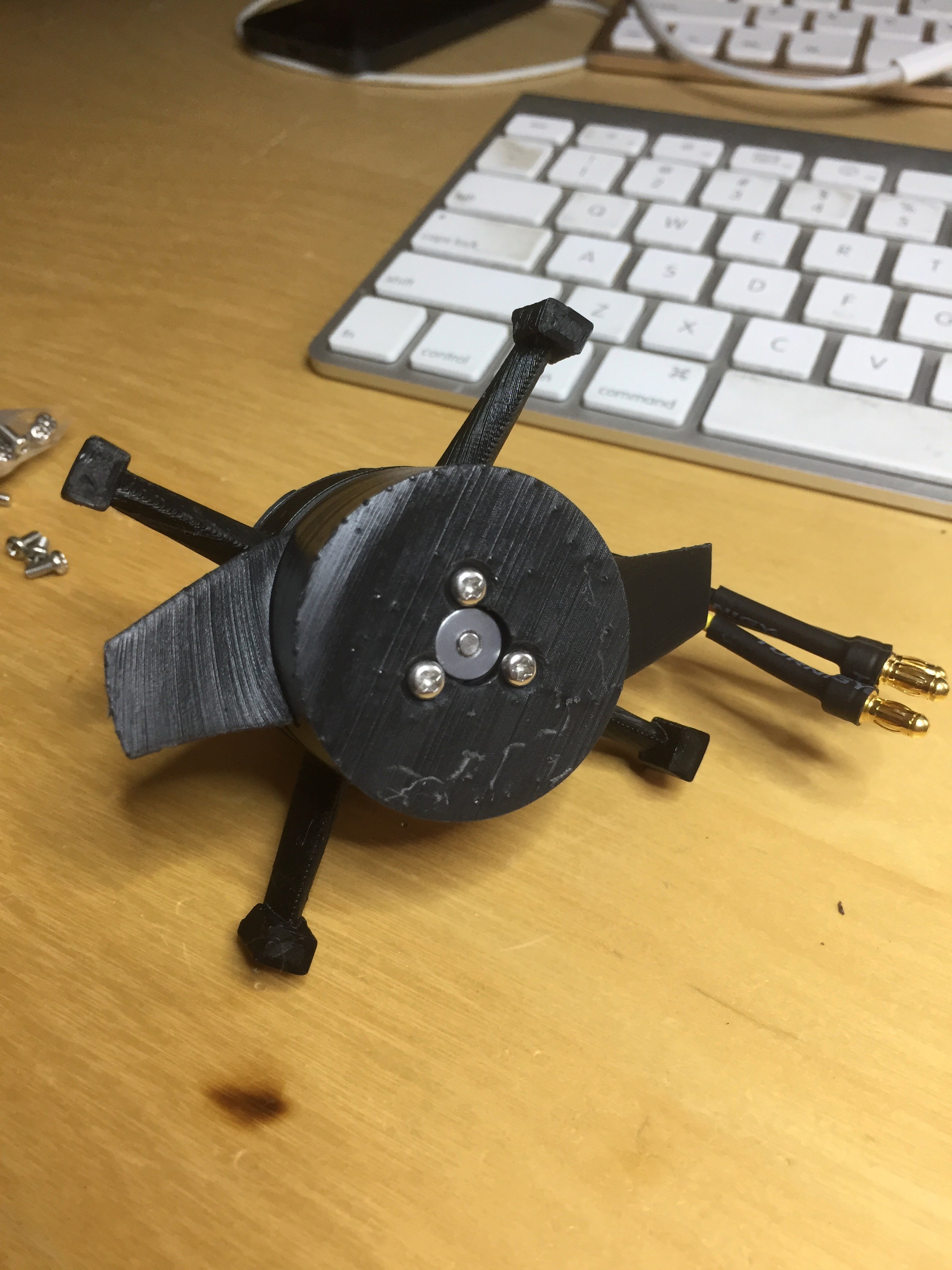
The final thrusters look identical (unsurprisingly).
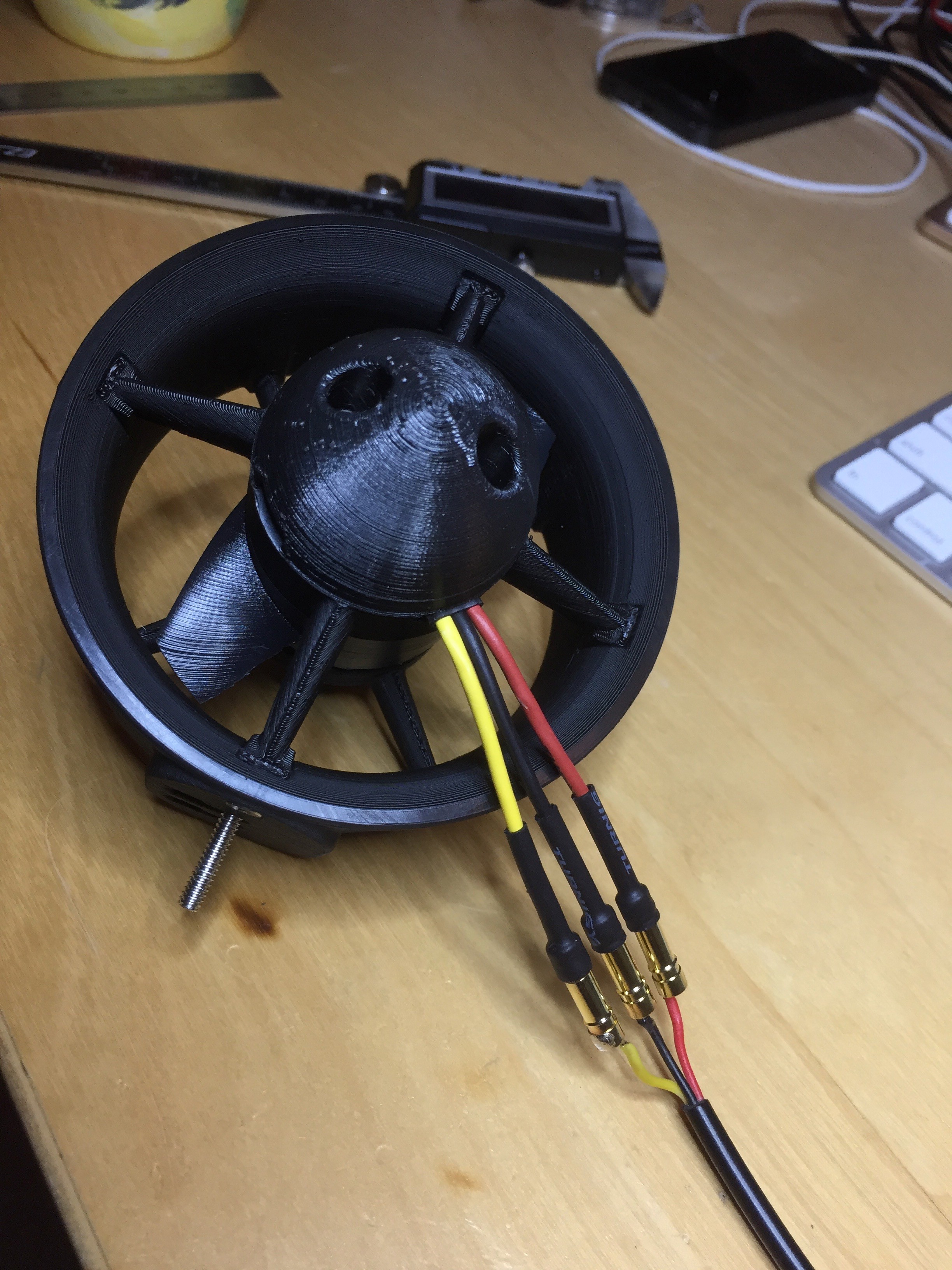
The bench tests looked promising so now I just need to buy a few more and test a set on the ROV.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hi Tim! Thank you for sharing your work! I'm planning a ROV build and I came across this project while looking for cost effective thrusters. Your project seems very promising, did you manage to test the upgraded thrusters?
Are you sure? yes | no