 bobricius
bobriciuson first protype I have 8 independent coils, now I connected opposite pairs in series
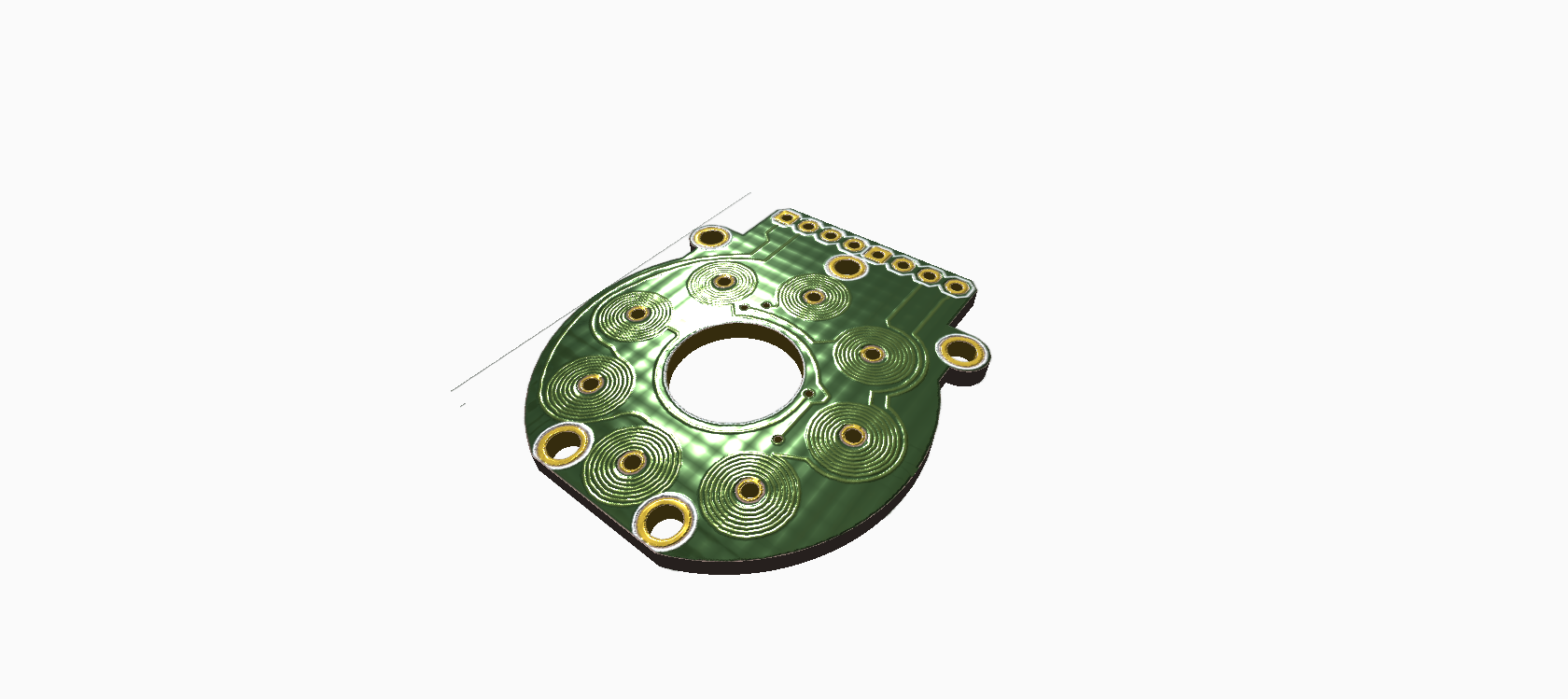
A project log for PCB stepper motor
... is designed for direct drive wheels for swarm robots
on first protype I have 8 independent coils, now I connected opposite pairs in series
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.