 int-smart
int-smartI had explained Kalman filter in the last post. What happens when the motion model and observation model is not linear. In robotics, the linear case occurs rarely. So algorithms that can handle non-linear models can be used to localize. The Extended Kalman filter is one such algorithm.
The observation and motion model for non-linear case can be represented by:
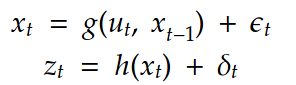 Here g and h represent the non-linear model. The other notations are the same as those in Kalman filter equations. After applying the non-linear models to the state x which in our case is a gaussian, we get a distribution that is not a gaussian. We try to approximate this distribution with a gaussian to get the final state. This is done by using Taylor expansion which linearizes the function at the mean.
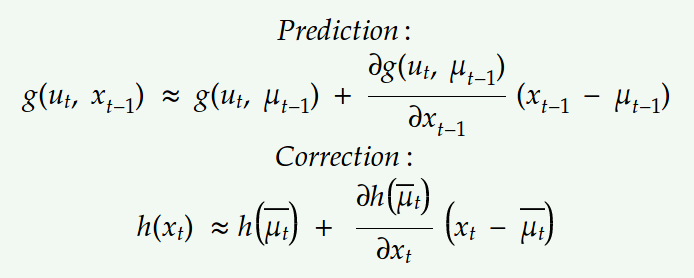
Here g and h represent the non-linear model. The other notations are the same as those in Kalman filter equations. After applying the non-linear models to the state x which in our case is a gaussian, we get a distribution that is not a gaussian. We try to approximate this distribution with a gaussian to get the final state. This is done by using Taylor expansion which linearizes the function at the mean. Using first-order Taylor expansion at the mean we can approximate the motion and observation model with the following linear model:
 Let the jacobians for motion and observation model be,
Let the jacobians for motion and observation model be,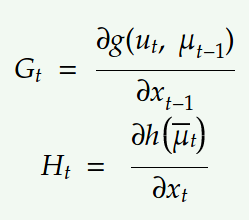 Substituting the above linear model into the Bayes filter equations we get,
Substituting the above linear model into the Bayes filter equations we get,
 Replacing the Kalman filter equations with the new linear model we get:
Replacing the Kalman filter equations with the new linear model we get: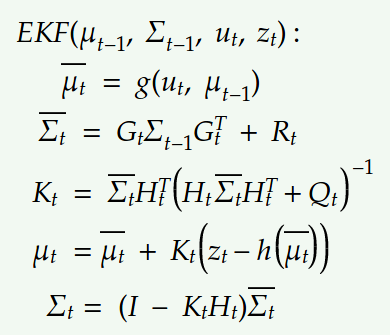 The above equations show the Extended Kalman filter where we just linearized the non-linear modelwith Taylor expansion. This method however performs linearization just at the mean due to which it is not representative of the actual non-linear model. It works well in cases where the non-linearities are moderate.
The above equations show the Extended Kalman filter where we just linearized the non-linear modelwith Taylor expansion. This method however performs linearization just at the mean due to which it is not representative of the actual non-linear model. It works well in cases where the non-linearities are moderate.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.