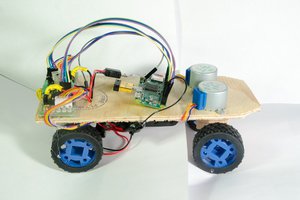
Parts:
- 50mm 18 ring omniwheels
- Maxon DCX22s motors with 16:1 gearbox and ENX16 Encoders
- Laser cut acrylic and 3D printed parts
- MPU-9250
- Teensy 3.x
- Miscellaneous components (switches, v-regs etc.)
- TI LMD18200 motor controllers
- HM-11 bluetooth? (currently not on robot)
- 1/2" shaft that goes through centre of robot -- for adjustment of centre of gravity (higher centre of gravity => better. Just imagine balancing a broom with the head at the top or bottom)
The PCB is designed in Cadsoft Eagle and manufactured by Elecrow.

 borazslo
borazslo
 Charles Galambos
Charles Galambos
 Danny FR
Danny FR
 Floz
Floz
I'm from Brazil. I made a ballbot as well.
Some videos about my ballbot:
https://drive.google.com/file/d/1nWU0XHk-8-4tK-WwWBTTzzUdiljSq0SM/view?usp=sharing
https://drive.google.com/file/d/1wf0ar_ykmmo4MJeqreep7MpMU-sA6eoK/view?usp=sharing
Your ballbot, do you set position = 0 then ballbot return to 0 position (x and y axis) ?
Dude I can not translation ballbot, please help me.
I made this:
error = position - setpoint ;
output1 = error * kp1;
errorAngle = output1 - Angle ;
diffError = errorAngle - errorAnglePrev / time ;
output2= errorAngle * kp2 + diffError * kd ;
It's just a axis, but i made it for roll and pitch, so i convert to 3 stepper motors (using convert ETH ballbot).