 Douglas Miller
Douglas MillerI got it all 3D printed and put together today. I really wanted to get a video of it running tonight, but no such luck. Got slowed down because I didn't leave any wiggle room on the motor mounts, and they needed it. Gear on the motor is shoved up way to tight against the first stage gear. When I get that mount off to modify it I'll show you what I mean. My bad, on that one.
I did plop it on the floor and give it some juice. Throttle is WAY too much. I go from a low hum to what seems like 40 miles an hour quicker than I can cut throttle. I had a feeling it would be that way, and was one of the reasons I wanted the arduino in the loop. Tonight it wasn't. I know I can adjust the transmitter, but I want it built into the walker so no matter what transmitter gets used, it will work right. It DID move, both sides, forward and reverse, it just did it in a rather, well, uncontrolled manner.
Anyway, here's what she looks like all put together. I just stuck a scrap piece of acrylic on top and zip tied it down, then stuck the electronics on it with double sided tape. Good enough for a first test.
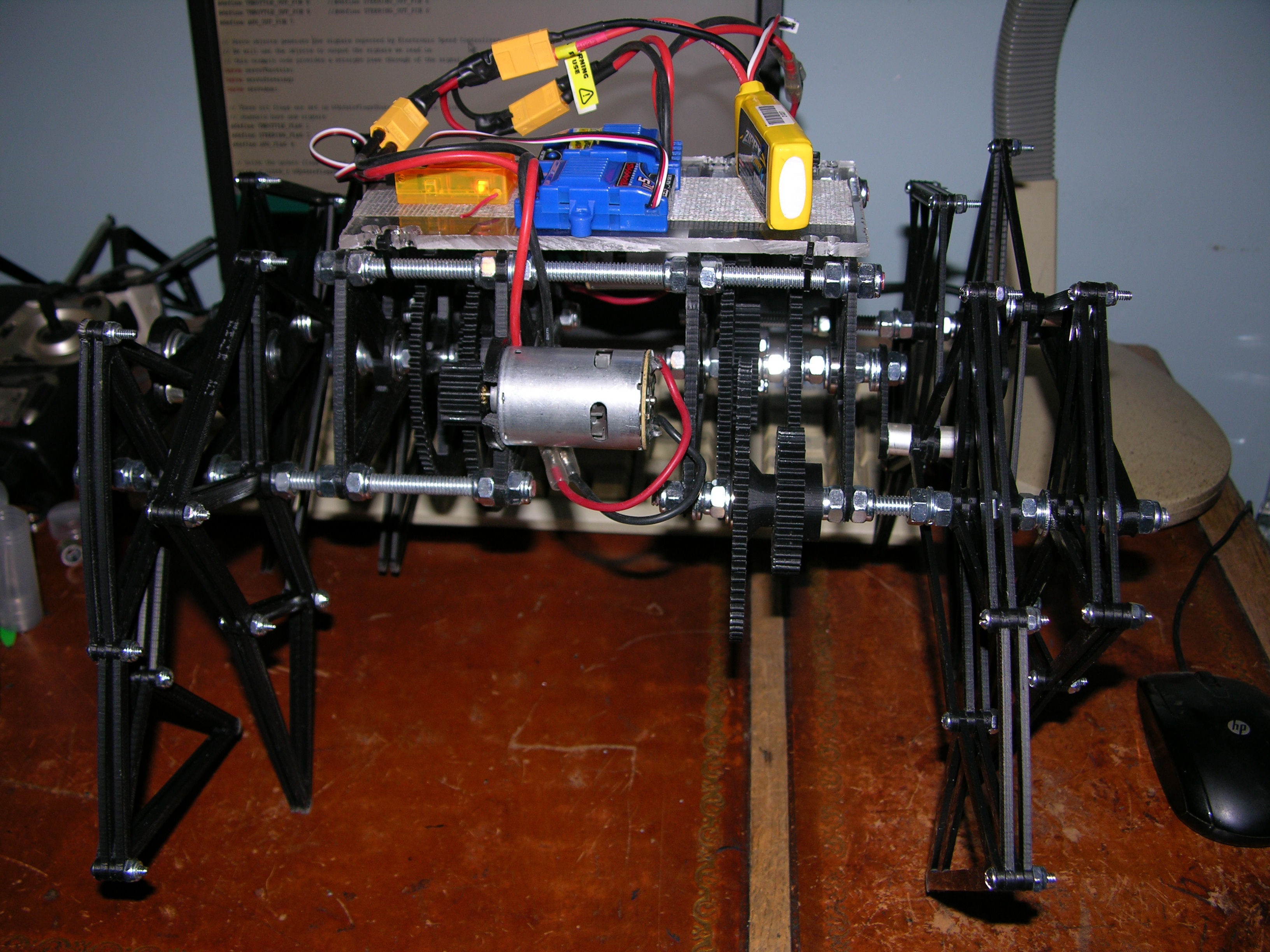
I think she'll work nicely for now, but a couple of things I think I'm going to change, just from the way she acted tonight. First, fix the motor mount. Then I think I'll print out some of the leg parts in carbon fiber. Getting too much flexing for my comfort. I also can see some design changes in the leg design to stiffen them up a bunch, and even work more efficient.
Stay tuned, hopefully video of her walking coming soon...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.