0%
0%
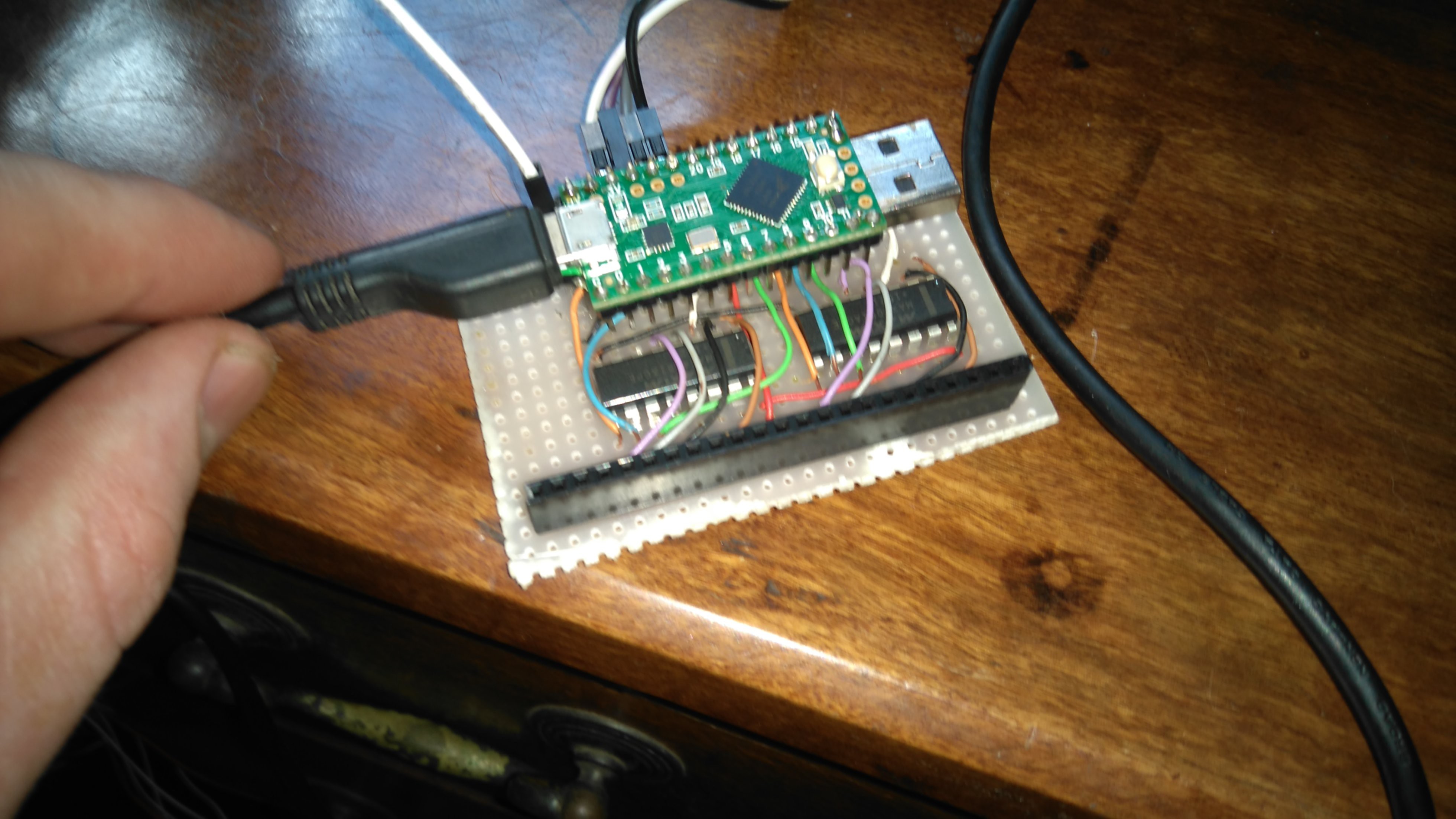
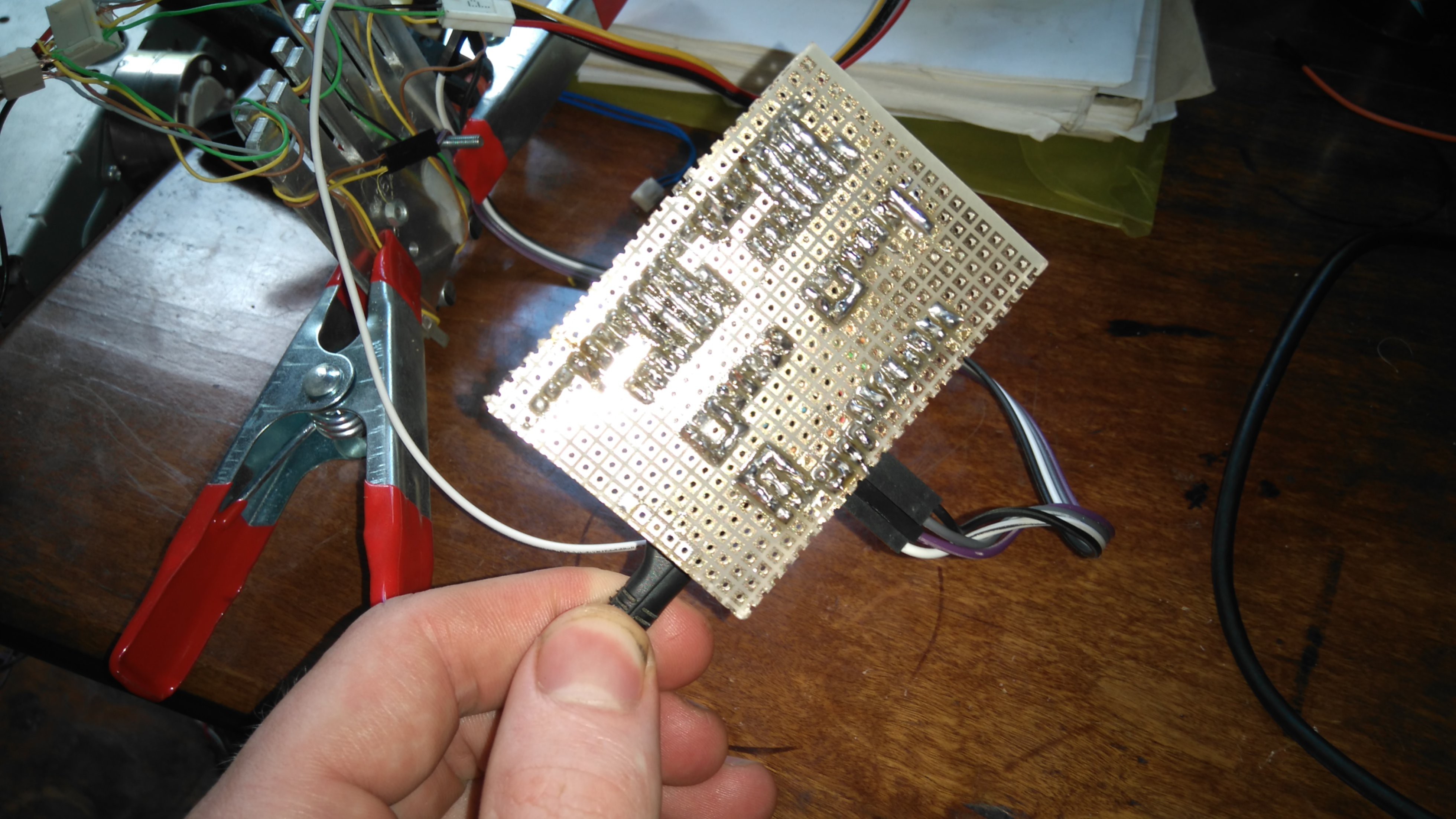
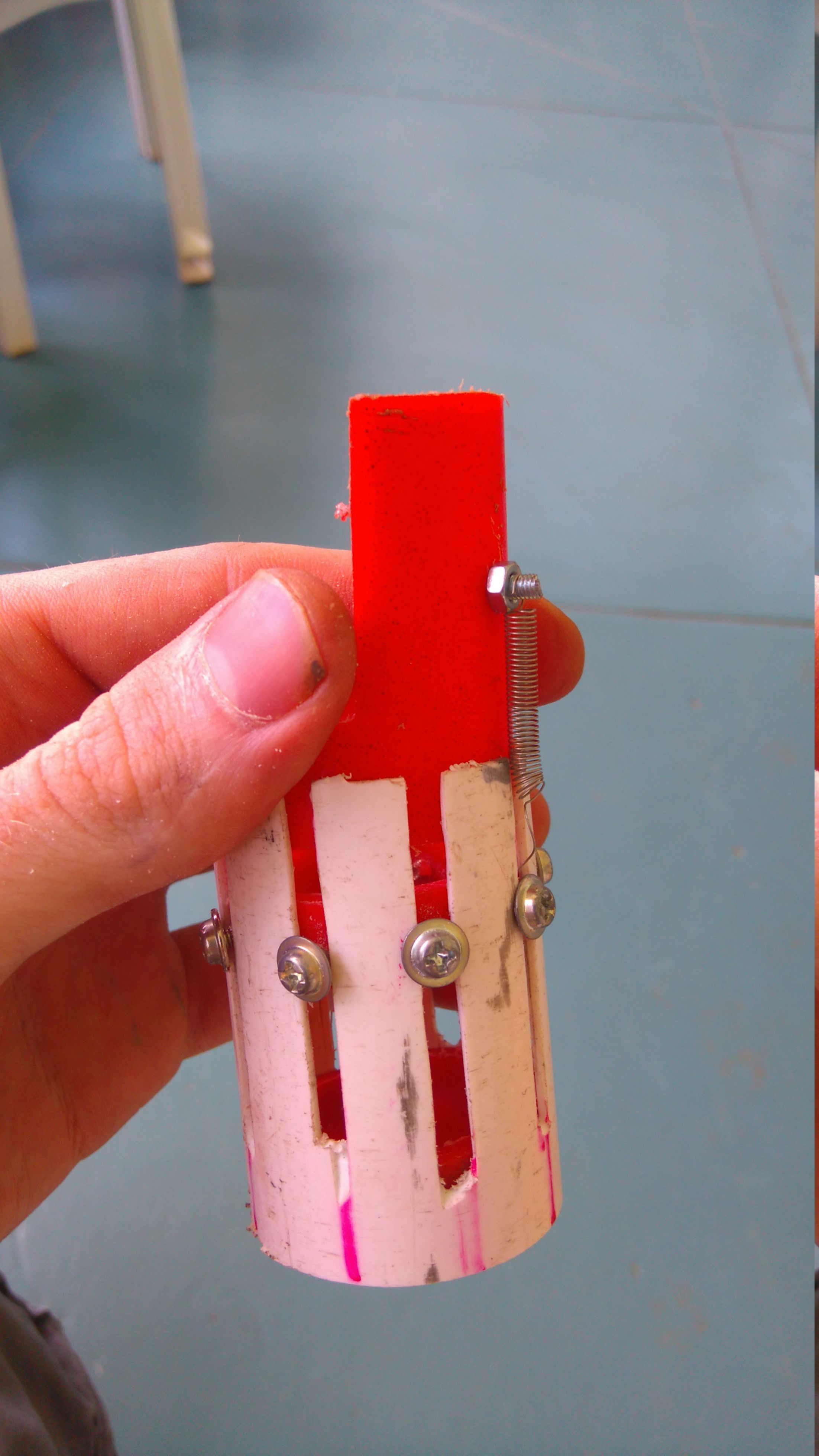
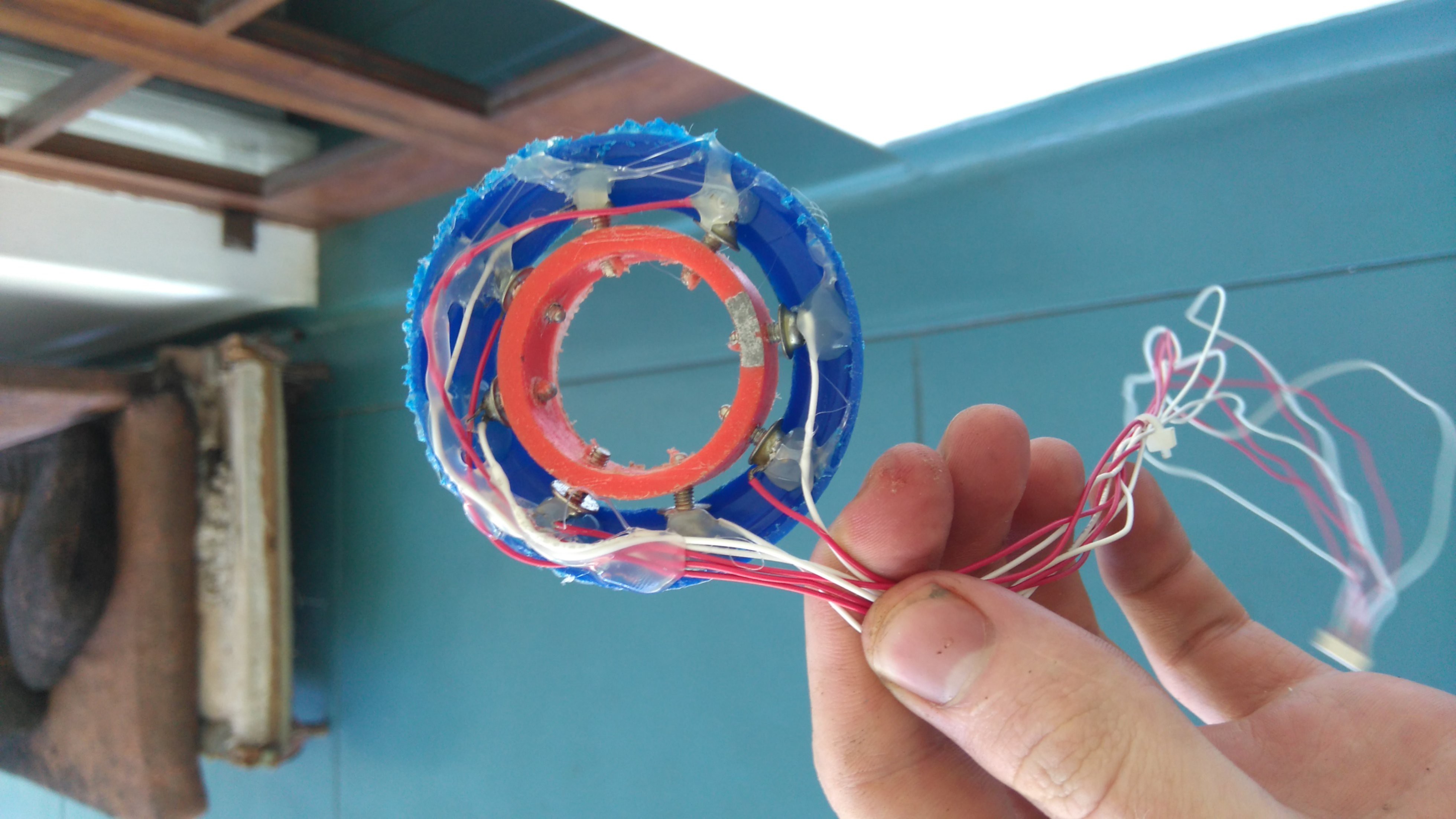
Scanning EIT Imaging System (SEITIS)
Using electrical impedance tomography to scan body parts in high resolution by scanning with a e-waste axis system. NOT A PRIZE ENTRY
 johnowhitaker
johnowhitakerBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Drew Pilcher
Drew Pilcher
 caver.adam
caver.adam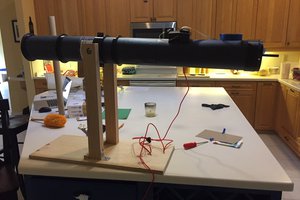
 Nathan Brown
Nathan Brown
 Joseph Marlin
Joseph Marlin
Color me VERY intrigued, I've got a bit of a soft spot for weird imaging systems