 Laetitia BEL
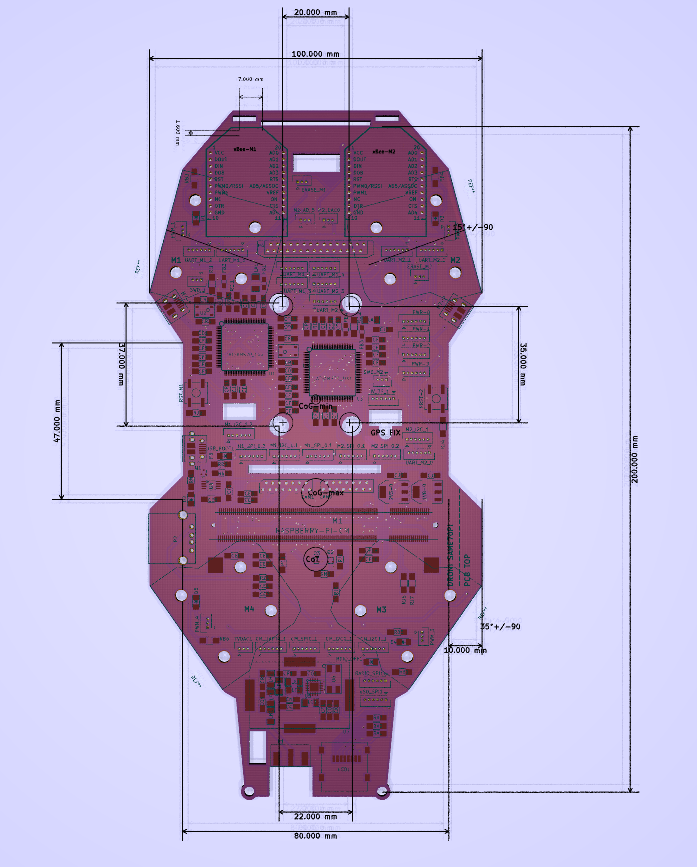
Laetitia BELI took into account the dimensions of all the sensors, sockets, arms,...
The initial view is slightly modified.
I moved a little fast on the PCB to have an initial version to make some iterations and verifications in parallel.
Il will give more details about the angles of the arms in another Log.
I just finished the first draw of the PCB TOP that handles the computation and the communication.
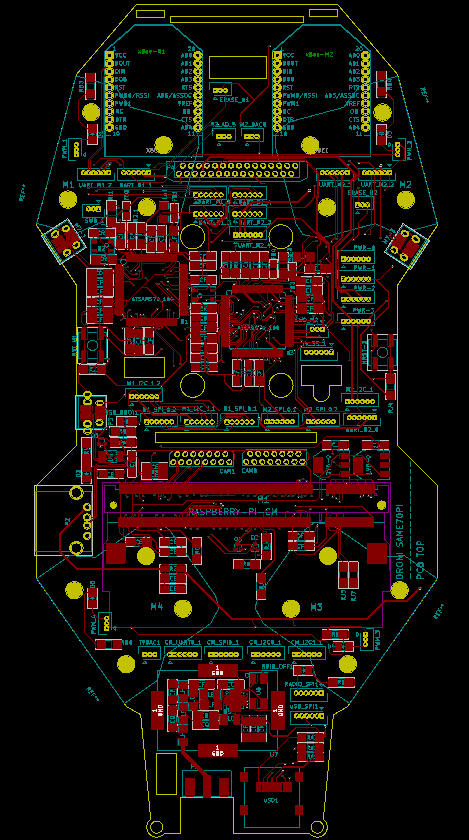
The final dimensions will be 100x200mm.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.