 Blake W. Ford
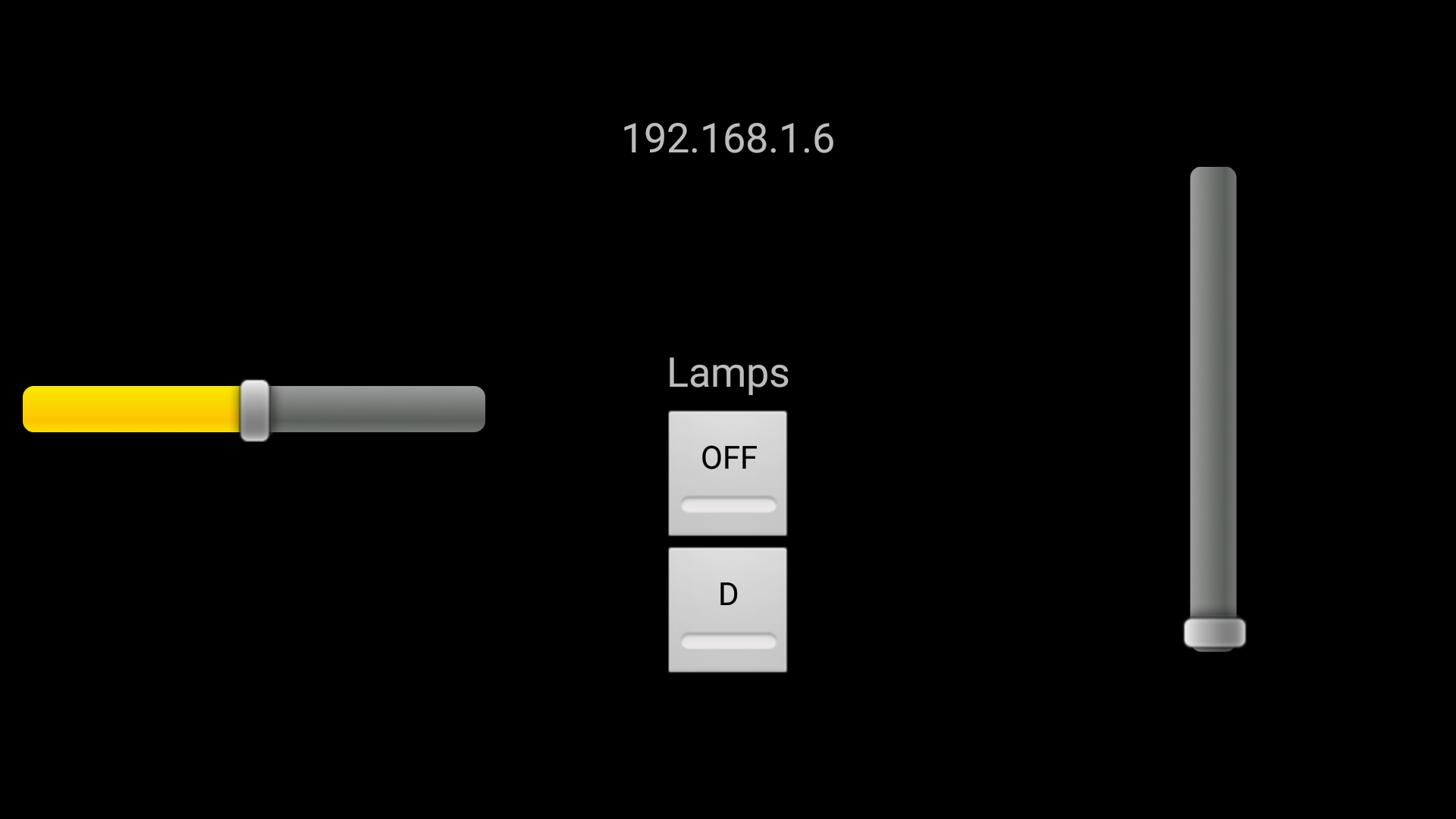
Blake W. FordBelow is a screenshot of the current state of the Android app.
As it can actually control the headlamps, it beats out the prototype Python server in things possible.
Control Layout
Left is steering control. In the center is the Phone(Server) IP, Lamp control and Transmission control. To the right the accelerator.
I doubt that I can or will update the Python server much farther as it is not my area of expertise and there is a fairly large hack in the code to allow the arrow buttons as input. Also I prefer Android. To quickly iterate on the the new controller, I made it possible to build the Edison firmware on Desktop. This build does everything the Edison can do aside from the libmraa pin toggling. It is awesome for testing the curl/webserver stuff.
Now that the lamps can be controlled remotely, I have accomplished the first basic goal of the project: exceed the original capability of the car using a data driven approach. I think for the first round of return data from the vehicle I'd like to attempt to display the charge left on the battery.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.