rlsutton1
rlsutton1-
Graph SLAM trials
04/30/2018 at 23:03 • 0 commentsI have wanted to use Graph SLAM for a long time now but got bogged down trying to detect features to supply to Graph SLAM.
I've tried Hough transforms to find lines, also wrote various versions if my own corner detection algorithms. I even used deep nets to detect corners and achieved 95% accuracy.
But all that still didn't amount to a viable set of features.
I then hit on the idea that a feature could actually be an entire map, which is what has lead to the current technique of the robot creating sub maps which it localizes in and moves between.
I also had problems getting my implementation of Graph SLAM working with an X Y THETA pose.
Ultimately I resorted to a watered down implementation of Graph SLAM implemented without using matrices. It doesn't attempt to model the position of the robot, but rather just the relationships between the features.
Hopefully in the next few weeks I'll be able to integrate my Graph SLAM into the build and finally see a map that improves as the robot traverses the map.
-
Map Building walk through
04/25/2018 at 01:13 • 0 commentsIn this video I explain the high level process of building a map as it runs around a section of my house building a map.
-
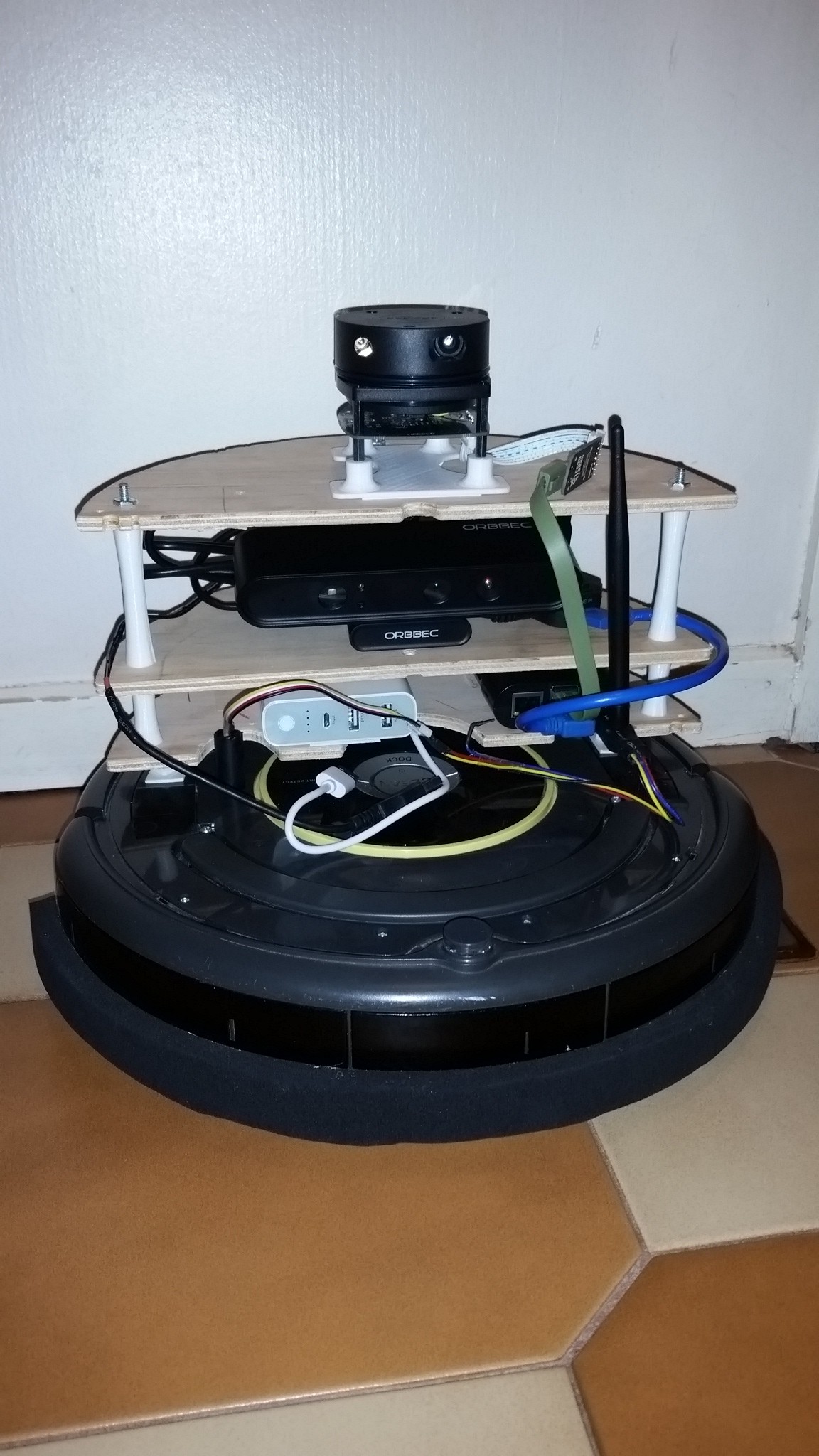
Adding an Astra Pro to the build
04/21/2018 at 11:58 • 0 commentsHere is a quick video of the build process adding an extra layer to house an Astra Pro depth camera.
-
Astra depth camera added
04/15/2018 at 22:46 • 0 commentsI've added an Astra depth camera to the build.
The total power draw of all the USB devices was to much for the pi, so a powered USB hub was also required.
I still have to write the code to use the data. In the short term it will serve as a video feed from the robot.
![]()
-
Build description and some hard learnt lessons
04/08/2018 at 22:35 • 0 commentsThis is the first vudeo log explaining the build of this robot.
I intend to cover the software in future video logs.
Autonomous SLAM with a Roomba
Autonomous robot performing SLAM using a Roomba, Raspberry pi, RPLidar and a laptop for the UI and heavy CPU work.