 deʃhipu
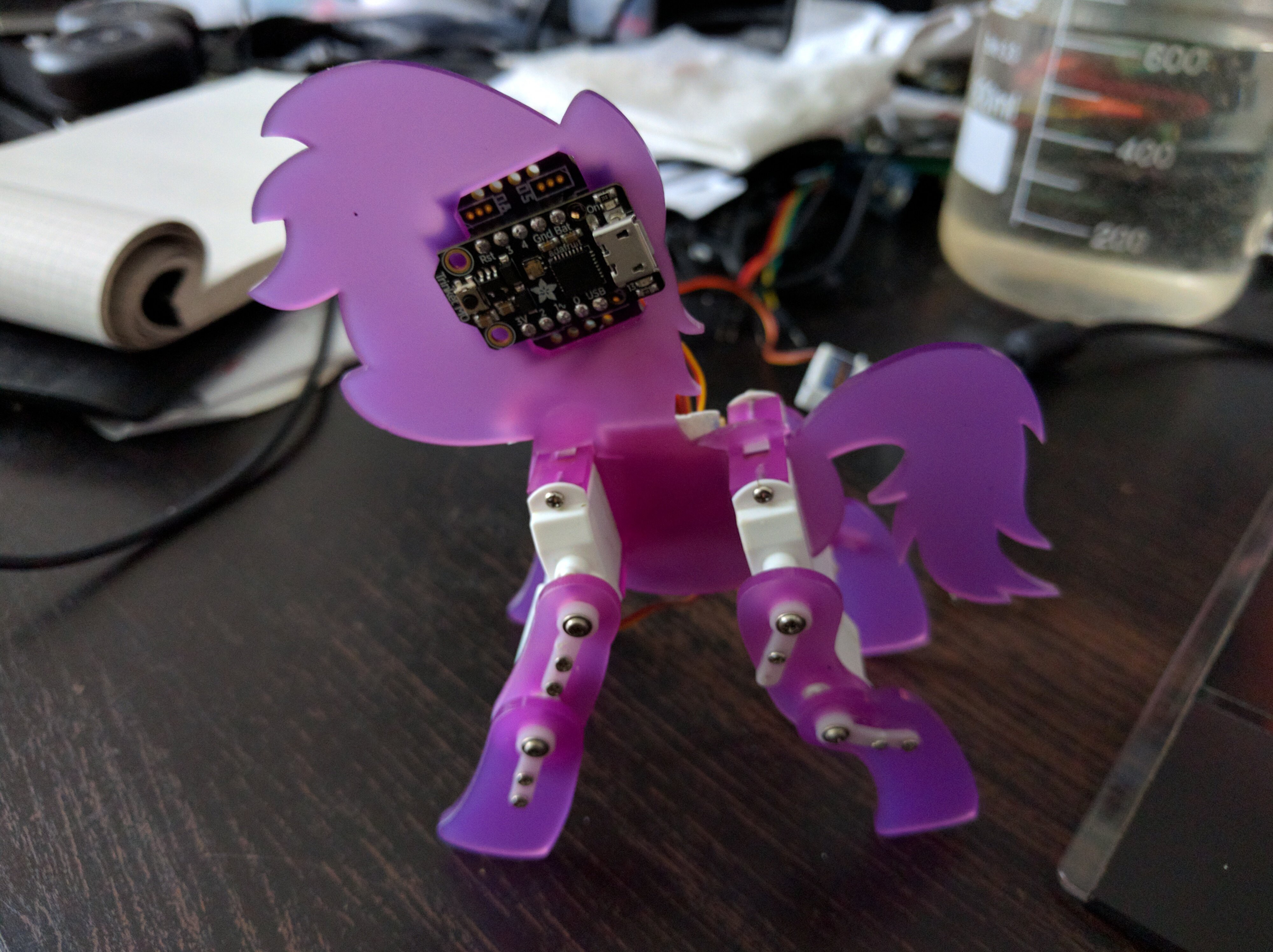
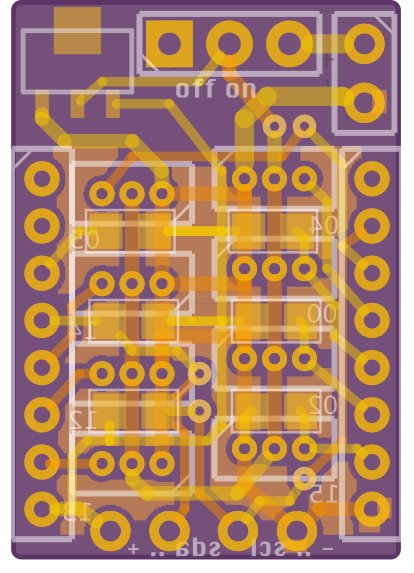
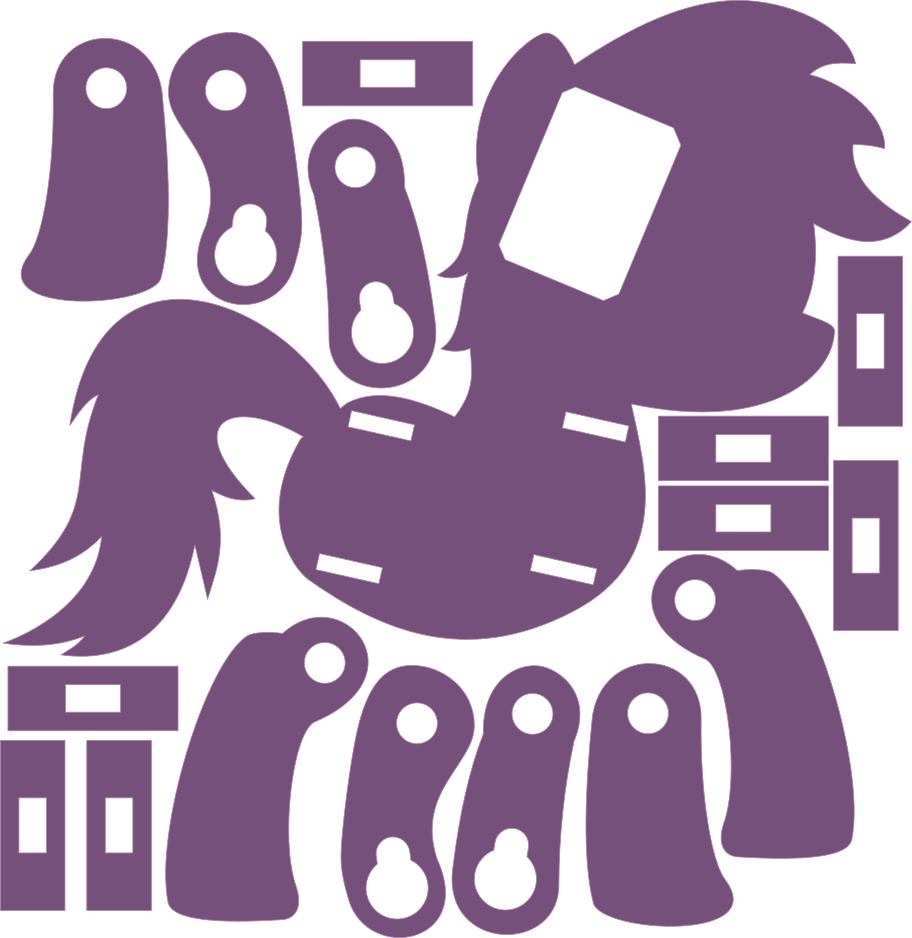
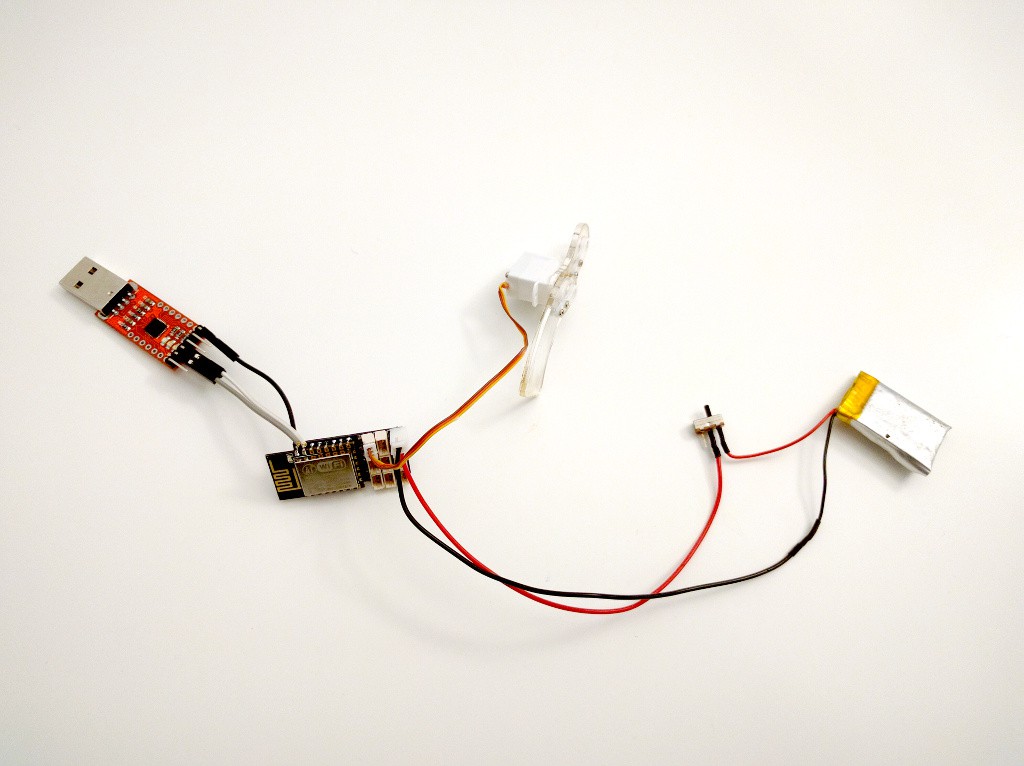
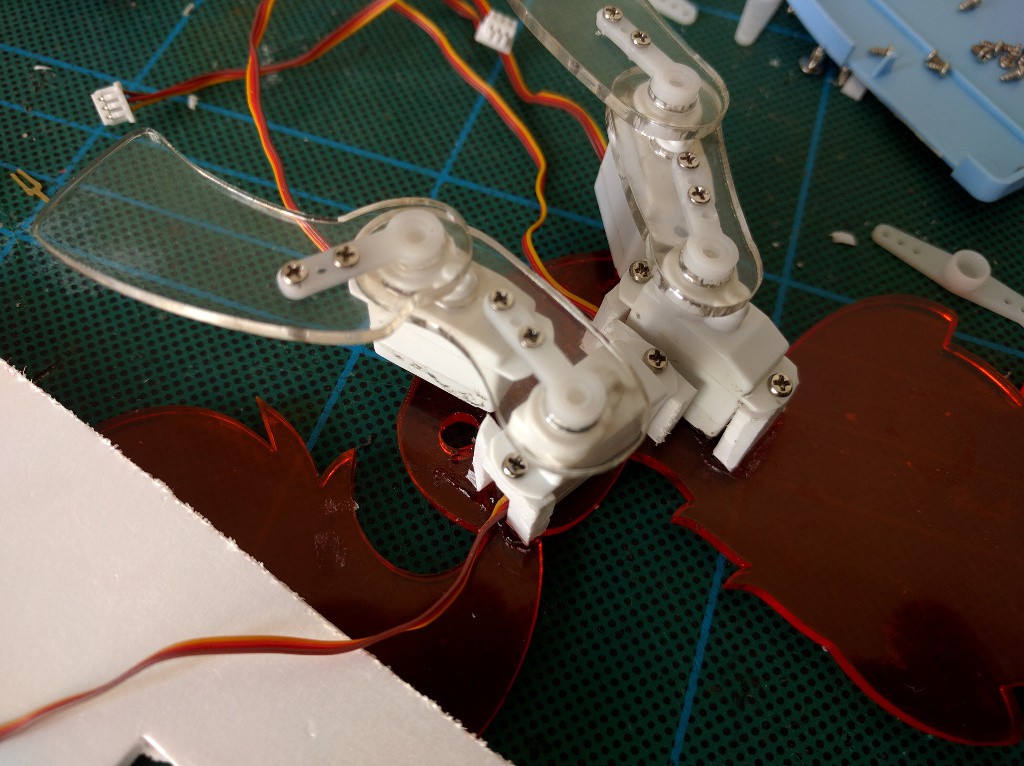
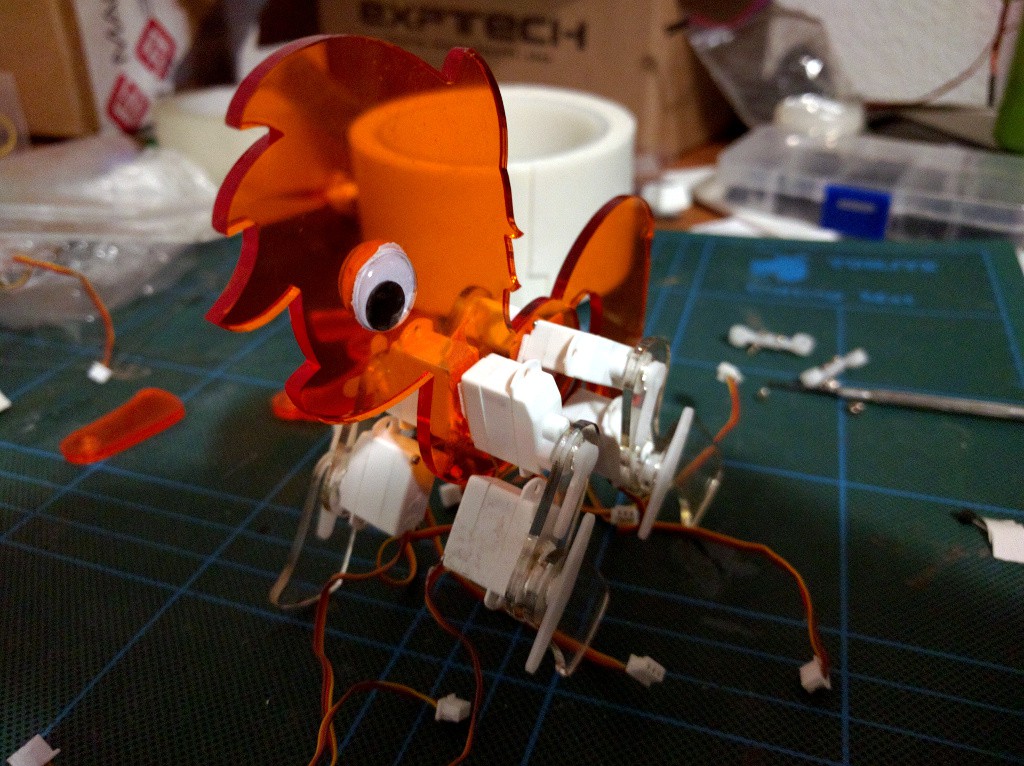
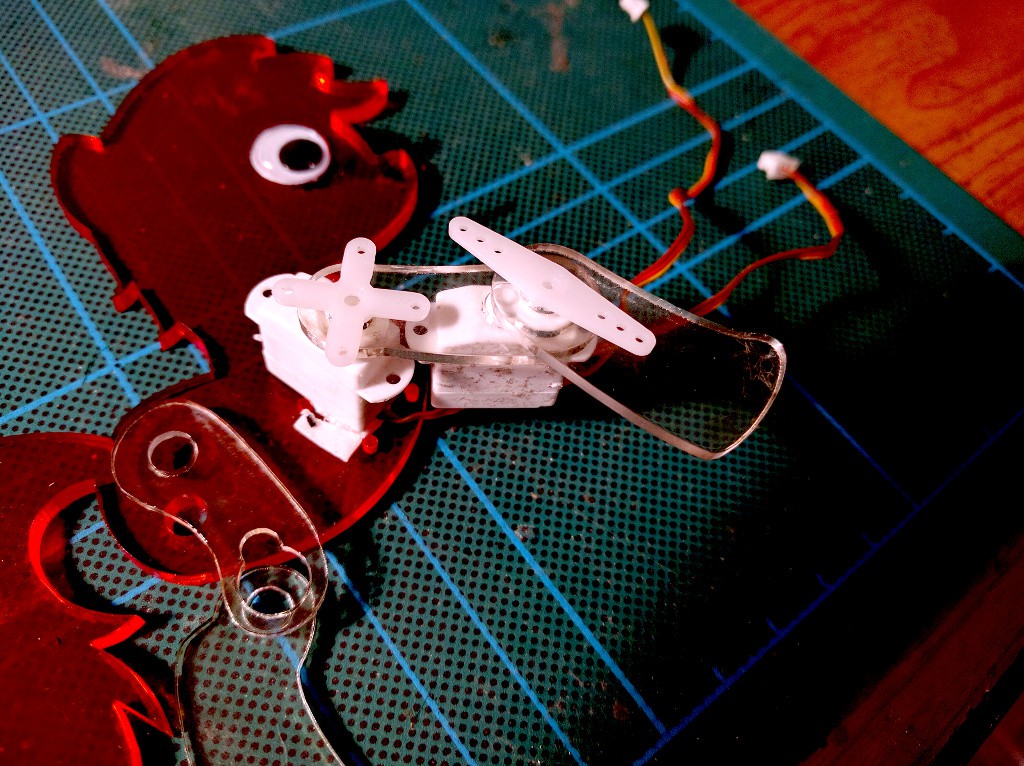
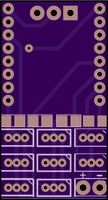
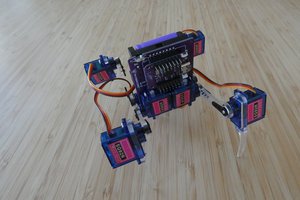
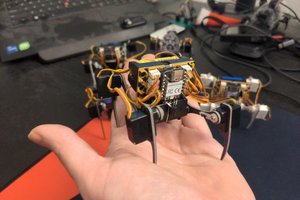
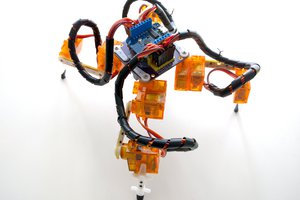
deʃhipuThis is yet another attempt at a 8-servo walking robot, similar to #Katka and #µKatka. Except this time I want it to be a cute robot pet, so I had to choose a cute shape for it. I will need to make yet another breakout board for the servos (the one I used on µKatka has some flaws) and this time I will need some sensors -- not sure what yet.
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






Awesome project! It reminds me of this pony robot: