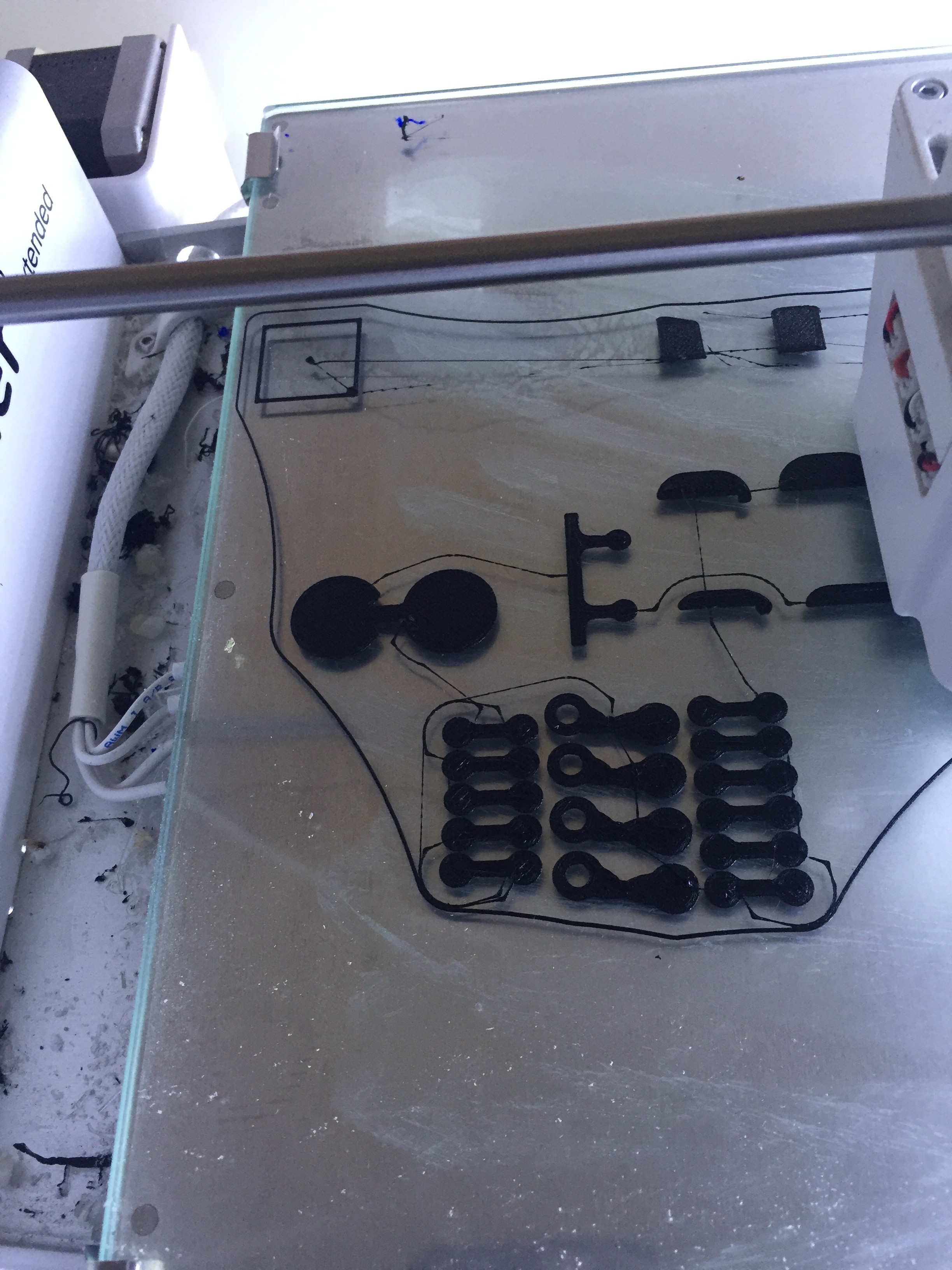
You will need to print 7 parts of the hand : - Bat Connection
- Finger Hinge Plate
- Flexy Hinge Plate
- Gauntlet (Long or Short however you choose)
- Finger Plate
- Hand Body
- Thermoform Palm
For the flexible and non-flexible parts we printed almost everything except the Flexy Hinge Plate in non-flexible material. But you can print it in whichever plastic you feel is best for each part.
2
Code for the sensor and servo motor
#include //Threshold for servo motor control with muscle sensor. //You can set a threshold according to the maximum and minimum values of the muscle sensor.#define THRESHOLD 130//Pin number where the sensor is connected. (Analog 0)#define EMG_PIN 0//Pin number where the servo motor is connected. (Digital PWM 3)#define SERVO_PIN 3//Define Servo motor
Servo SERVO_1;
/*-------------------------------- void setup ------------------------------------------------*/voidsetup(){
//Set servo motor to digital pin 3
SERVO_1.attach(SERVO_PIN);
}
/*-------------------------------- void loop ------------------------------------------------*/voidloop(){
//The "Value" variable reads the value from the analog pin to which the sensor is connected.intvalue = analogRead(EMG_PIN);
//If the sensor value is GREATER than the THRESHOLD, the servo motor will turn to 170 degrees.if(value > THRESHOLD){
SERVO_1.write(170);
}
//If the sensor is LESS than the THRESHOLD, the servo motor will turn to 10 degrees.else{
SERVO_1.write(10);
}
//You can use serial monitor to set THRESHOLD properly, comparing the values shown when you open and close your hand.
Serial.println(value);
}
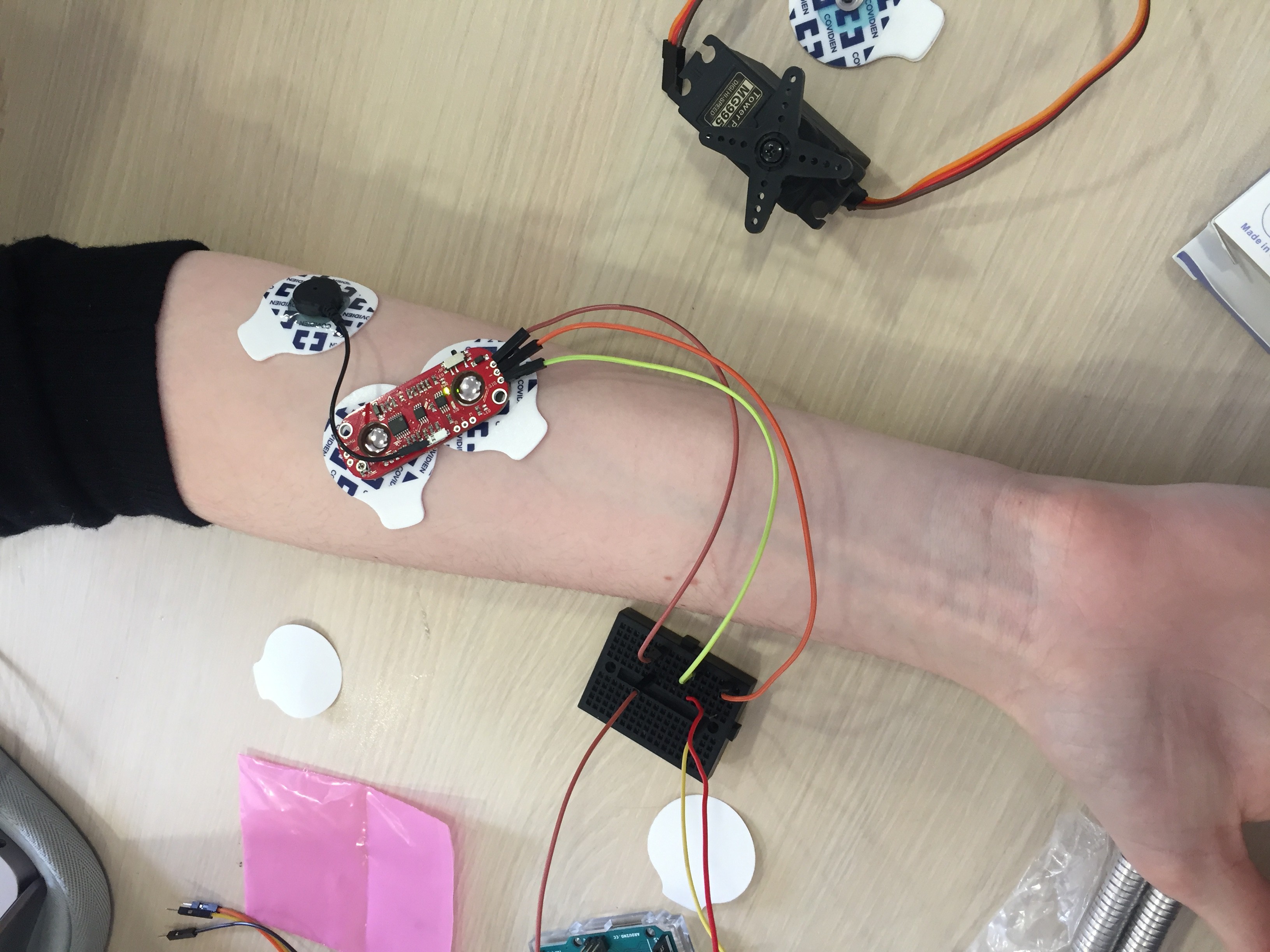
Don't forget to first visualize the signal received from the muscle sensor with the analog sensor code which you can find in arduino example codes to establish the threshold.
We, first, wanted to do our project with a muscle sensor but is quite difficult. However, here, you can see what it would have looked like.
3
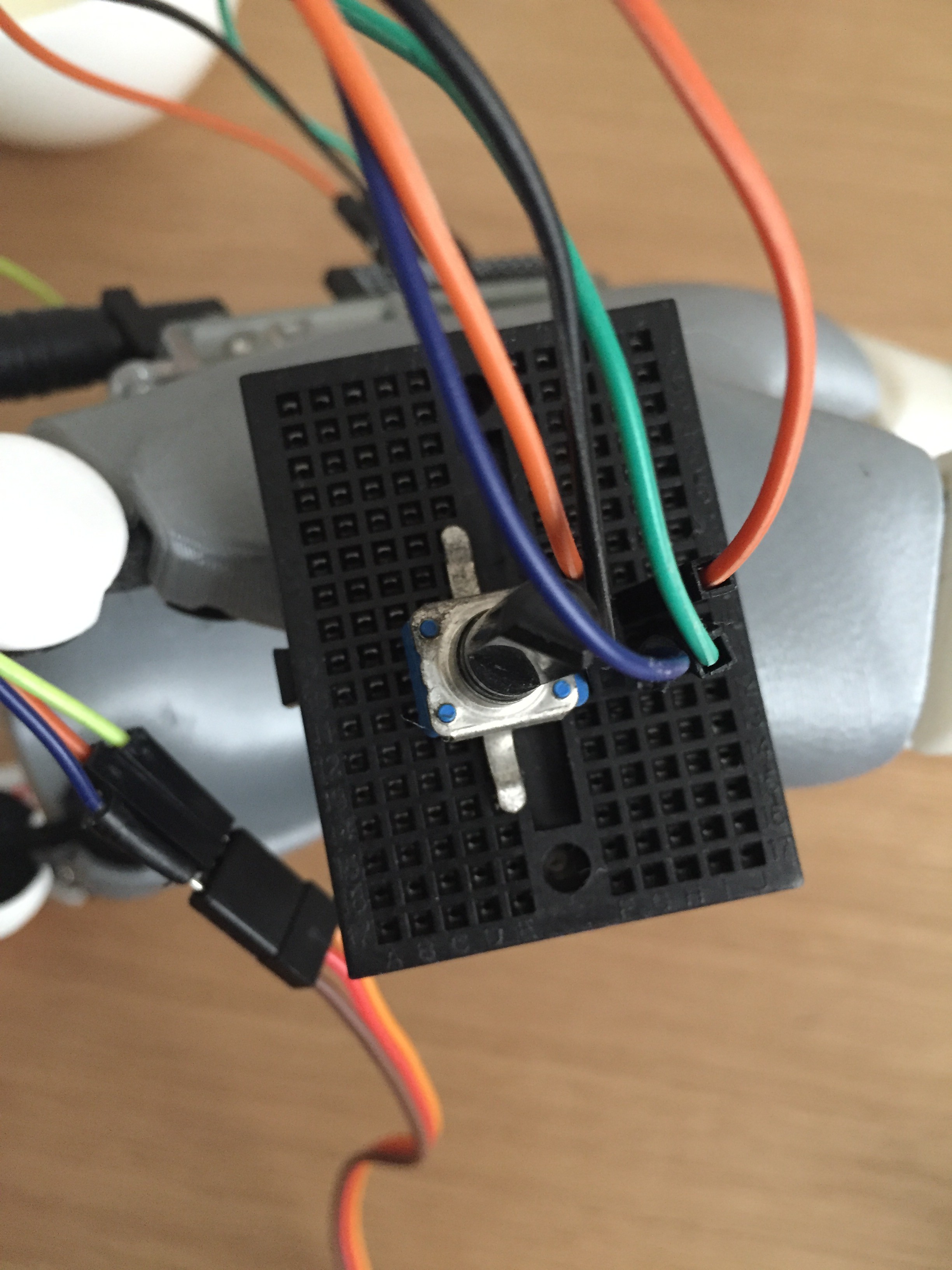
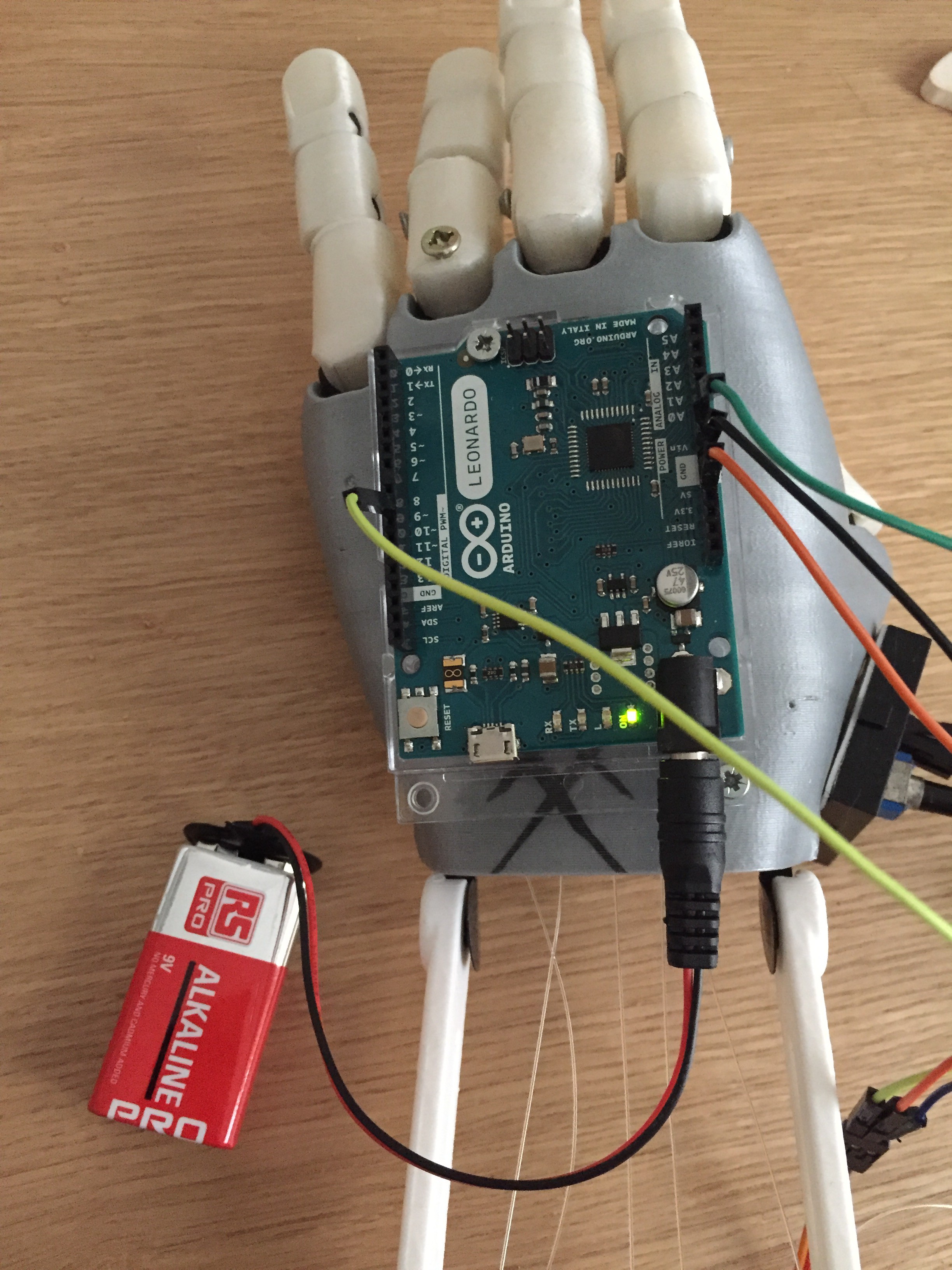
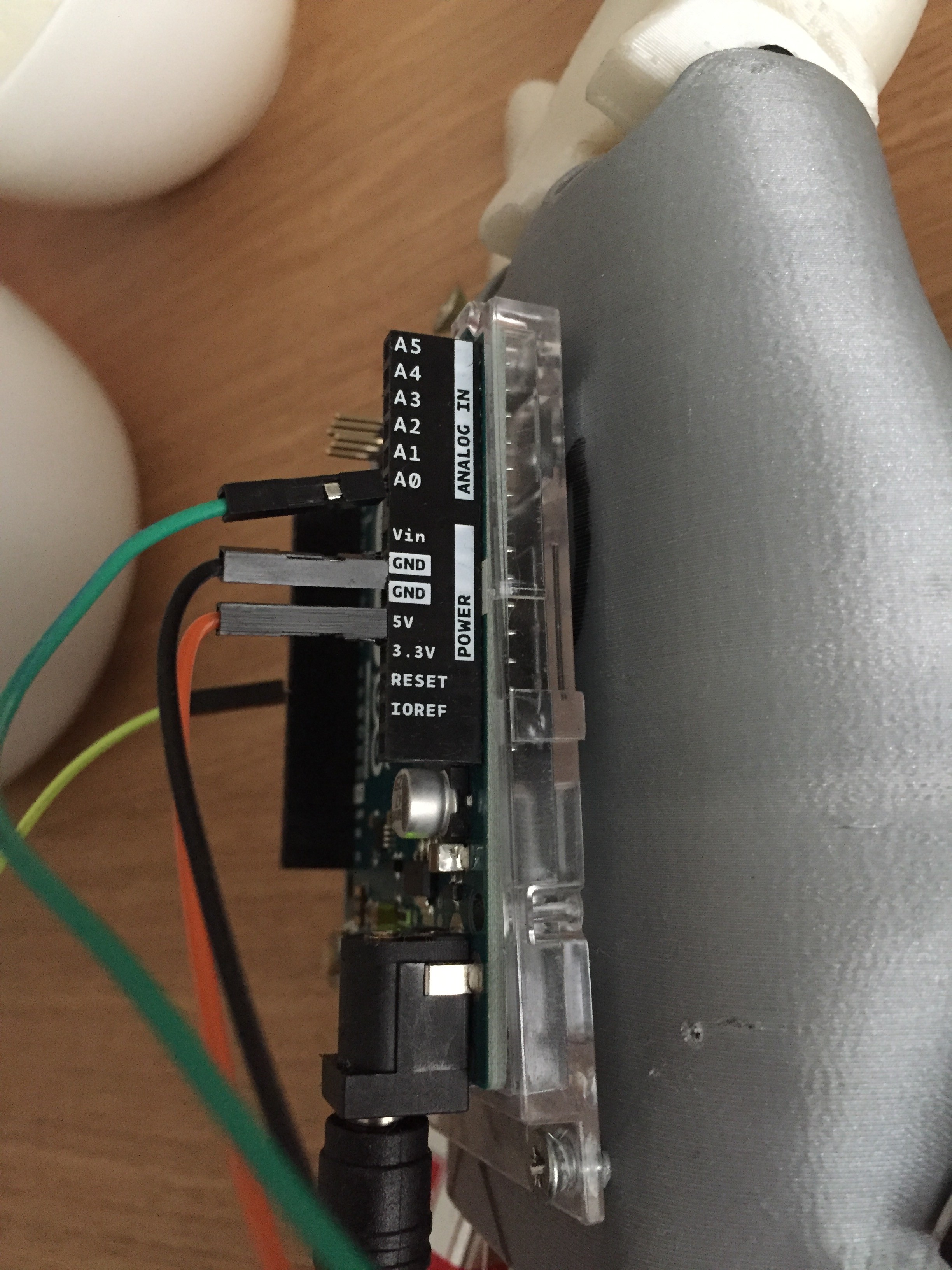
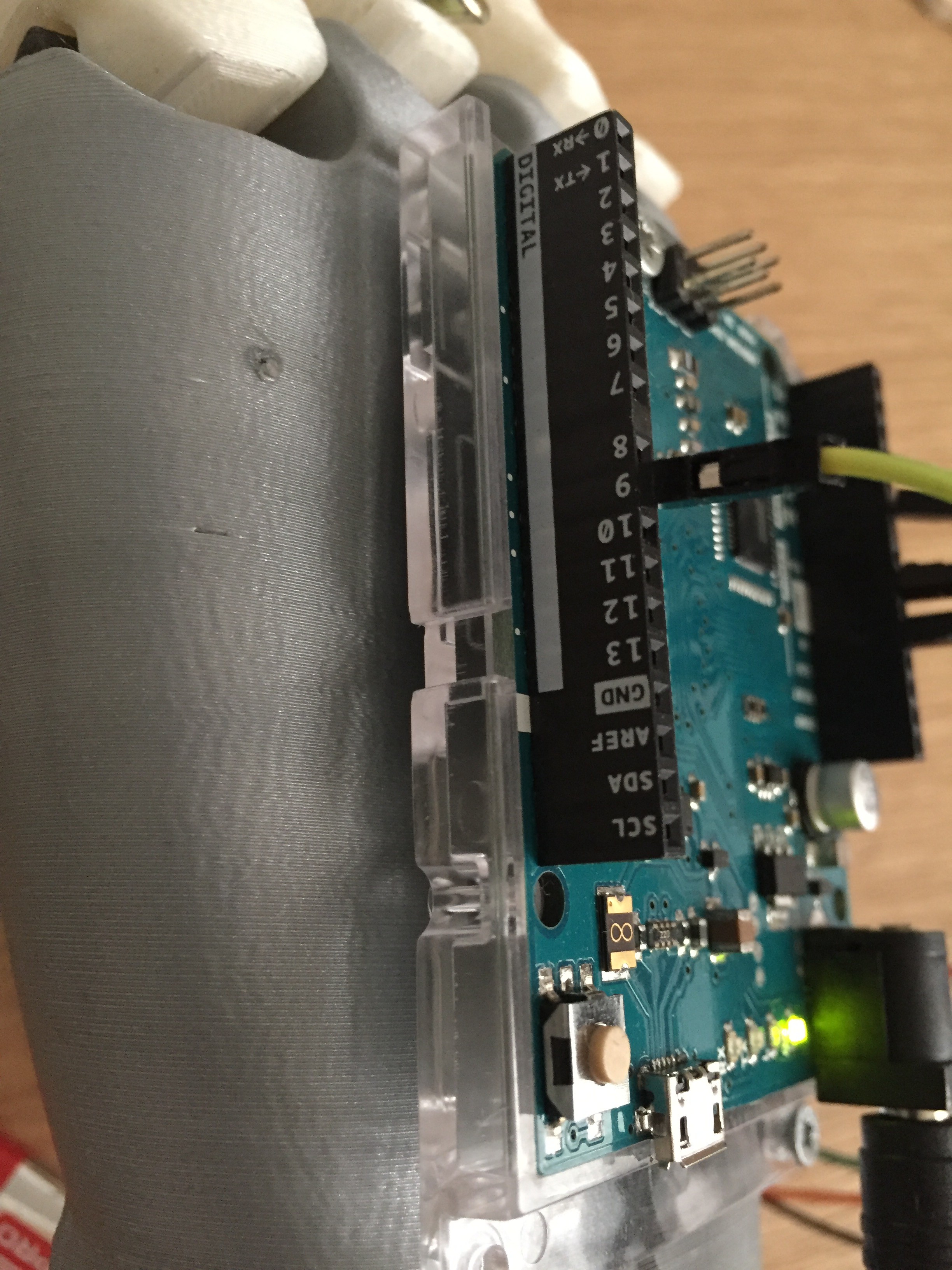
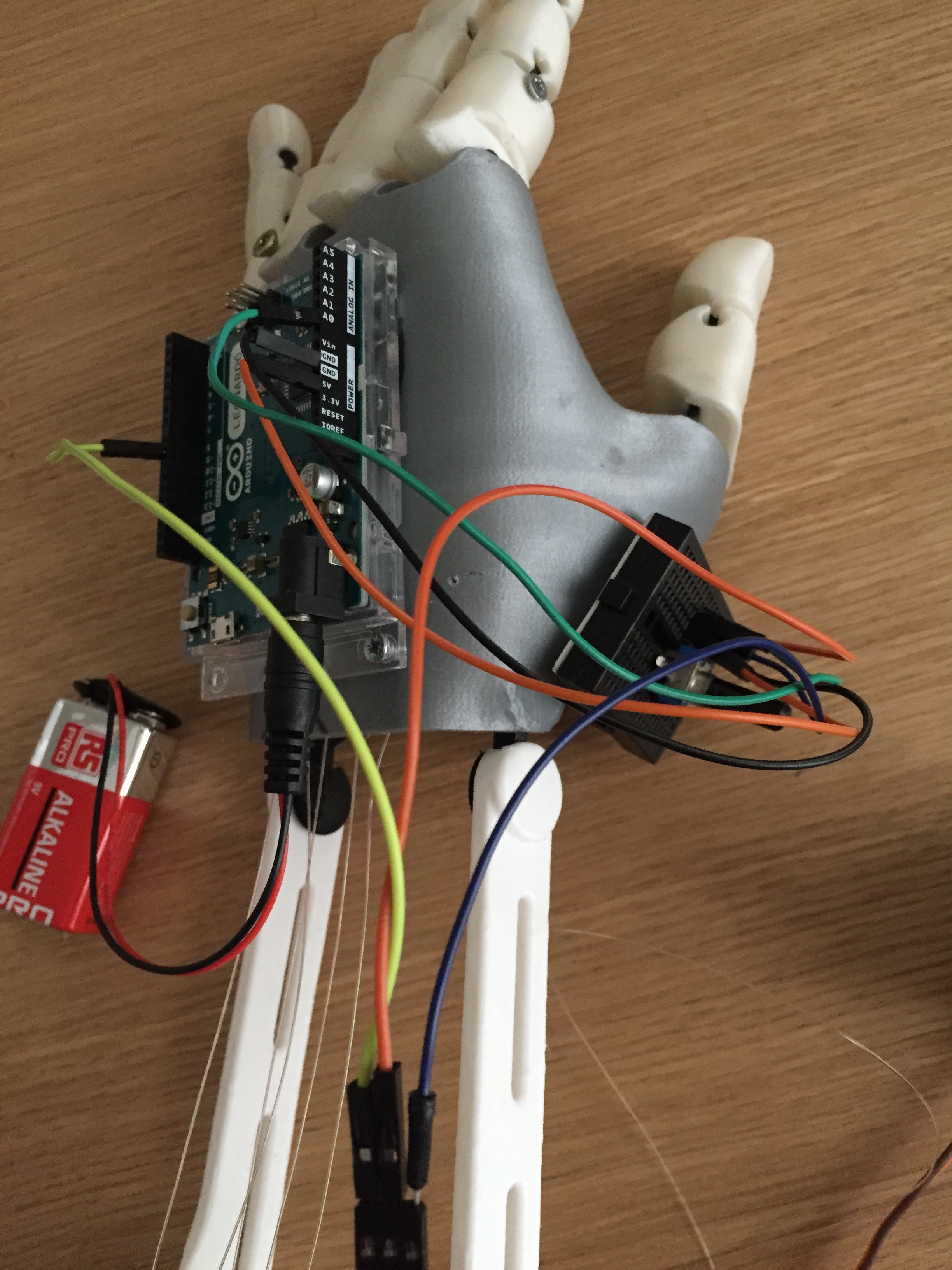
Assemble
For the third step, assemble everything, the arduino card and the flexy-hand and try to make everything work. Here are pictures of all the cable placement between the arduino card, the servo motor and the potentiometre ( the muscle sensor broke). we can also find the circuits on the internet.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.