0%
0%
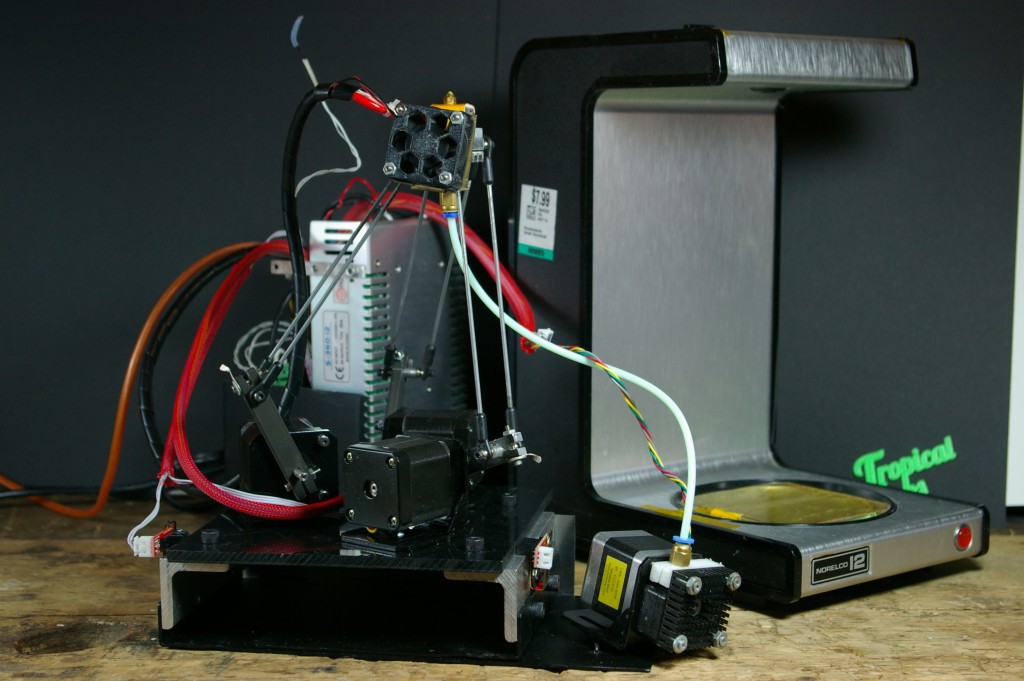
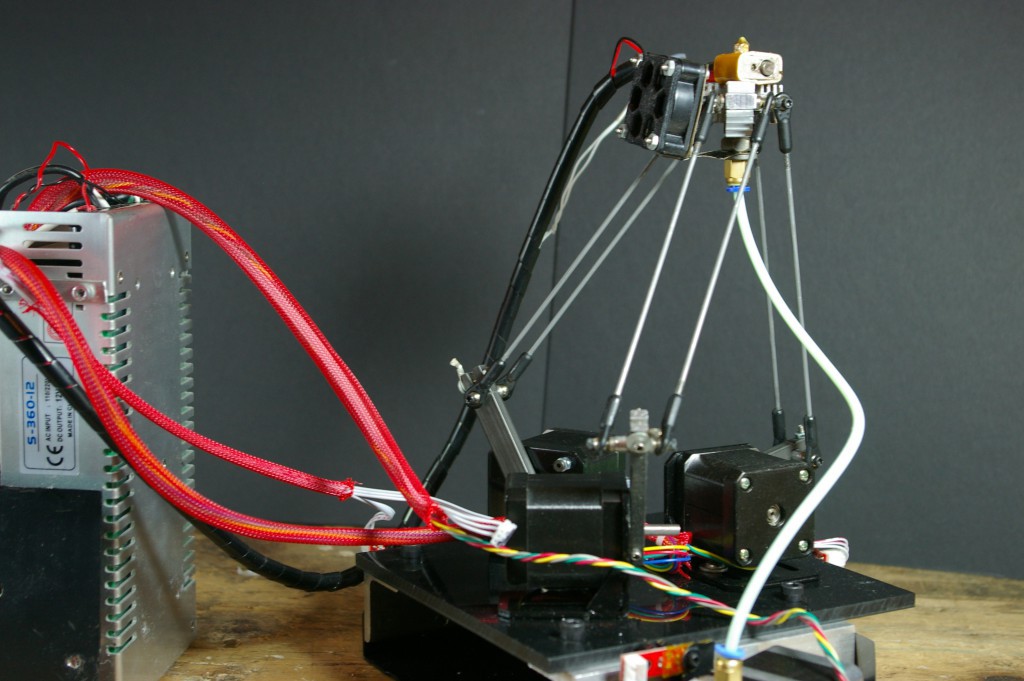
Coffee Maker Delta 3D Printer
Built on a coffee maker. And on a budget. No precision rails or bearings. True Delta Kinematics. Great prints.
 jcchurch
jcchurchBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Andrew Kowalczyk
Andrew Kowalczyk
 A.J.
A.J.
 Xieshi Zhang
Xieshi Zhang
 adamfilip
adamfilip
Gotta say... I love it. Somehow I missed this gem. You combined two of my favorite things. :)