In order to create the 3D model easier later on, I sketched the basic shapes and measurements and also cut out a cardboard model to make sure the fingers could move as I wanted them to.
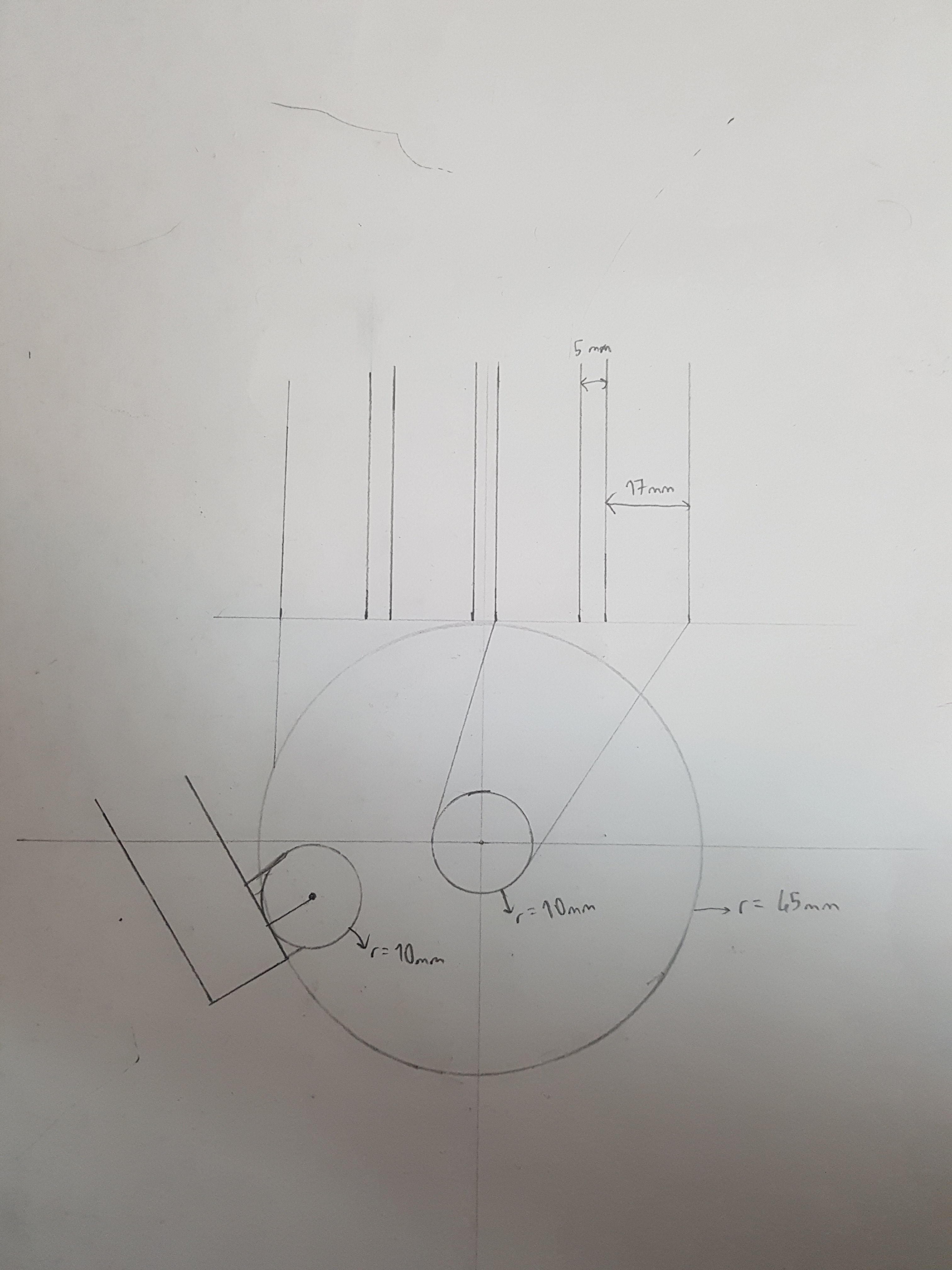
The basic measurements of the gripper can be seen in the picture above. The center of the 10 mm circles will be attached to the servos and will work as a point of rotation. I might need to alter the measurements in order to make the pieces fit better together.
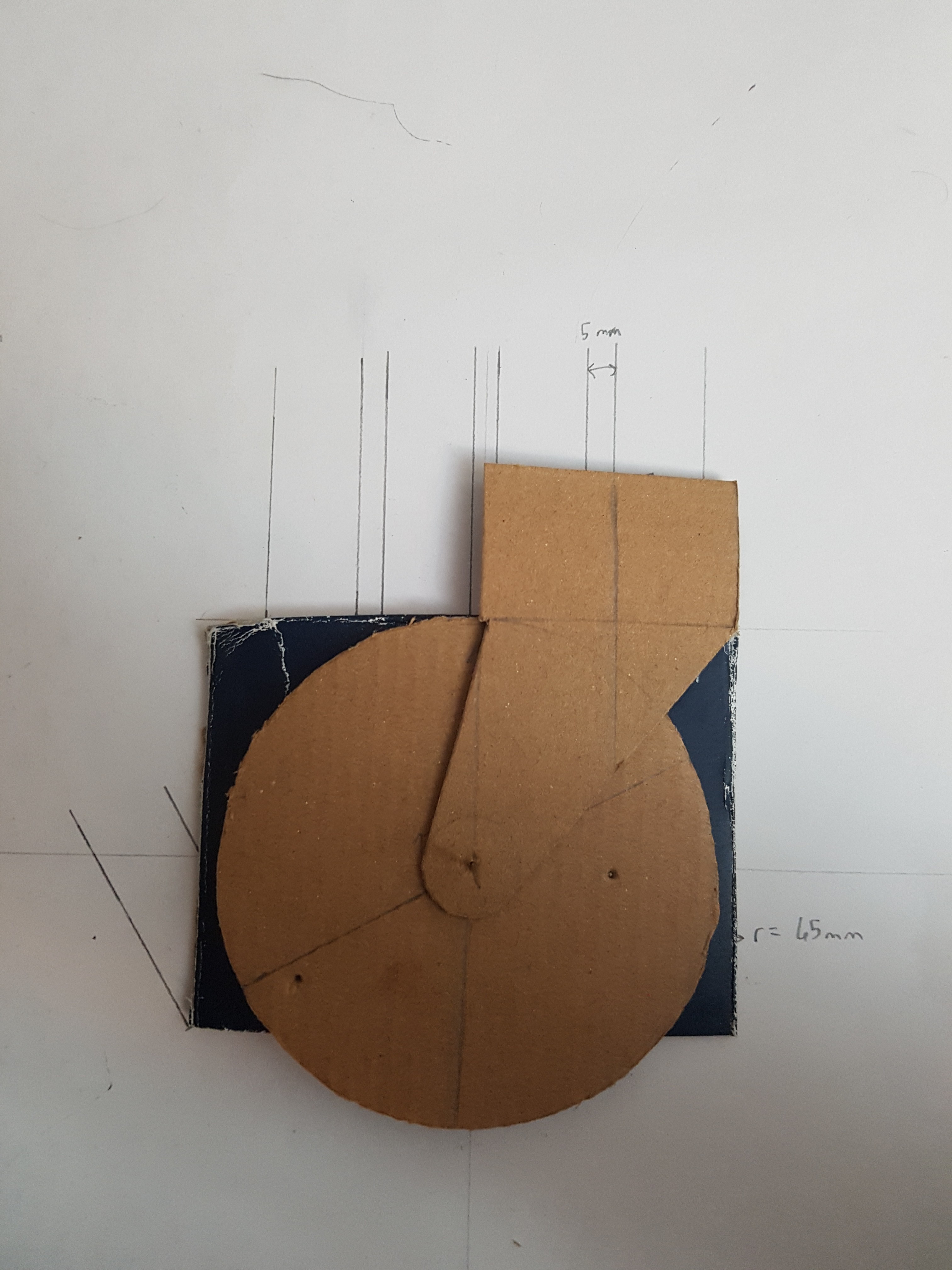
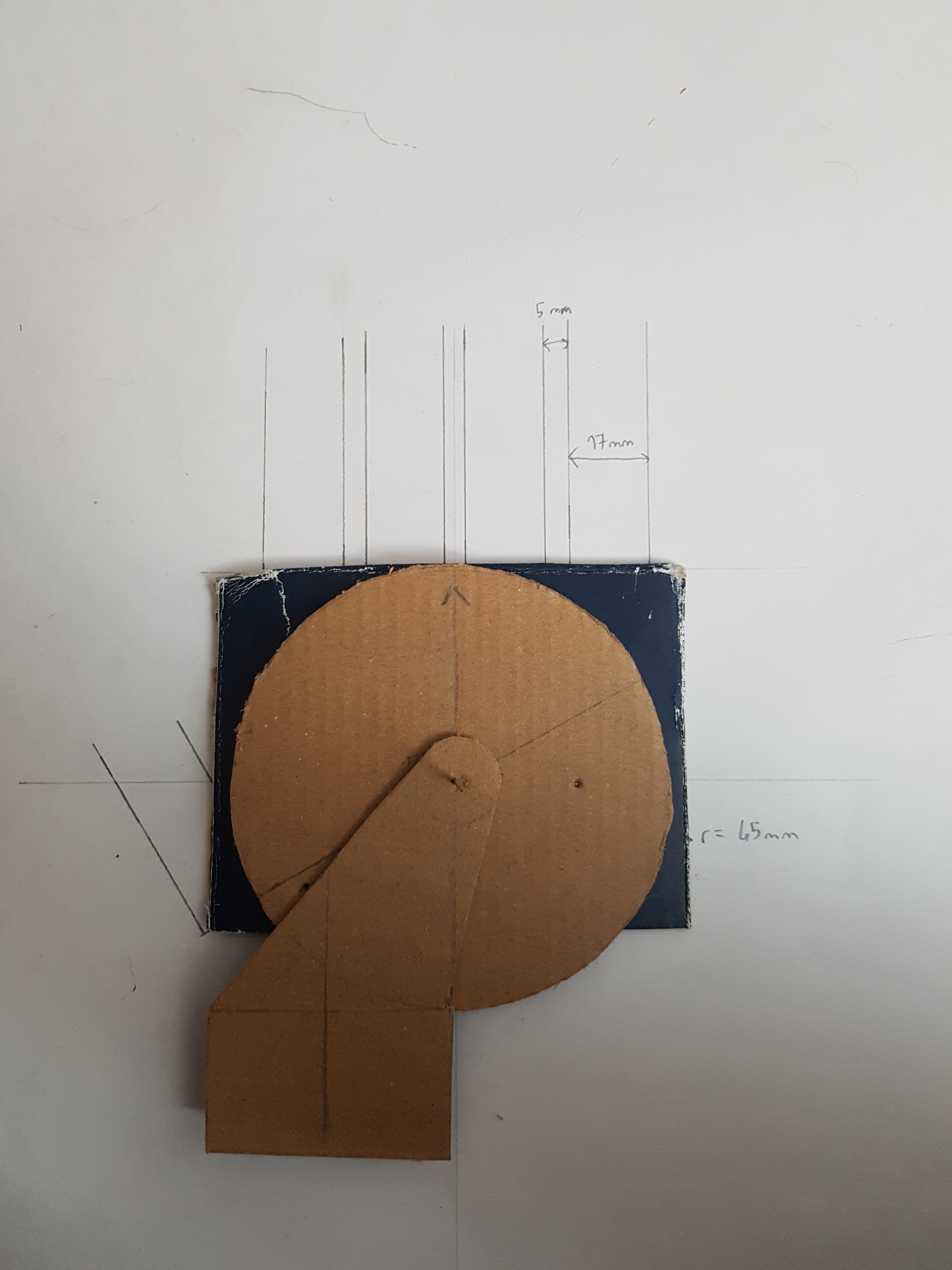
The cardboard cutout that shows to intended movement of two of the three fingers that will be able to rotate around a total of two axis.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.