borazslo
borazslo-
New steering system
05/18/2016 at 00:35 • 0 commentsAs I mentioned regarding the RoboCar Zero v2, the stepper motor for steering was not strong enough. So I began to use my second stepper motor for steering. Now each motor turns one of the front wheels. It is not only better but also looks better.
![]()
But there is a strong drawback of this steering system: the two wheels are not turning together. Stepper motors are precise, but when the tractions of the wheels are not exactly the same, the wheels can turn differently. So let's go back to the drawing table.
![]()
-
RoboCar Zero v2
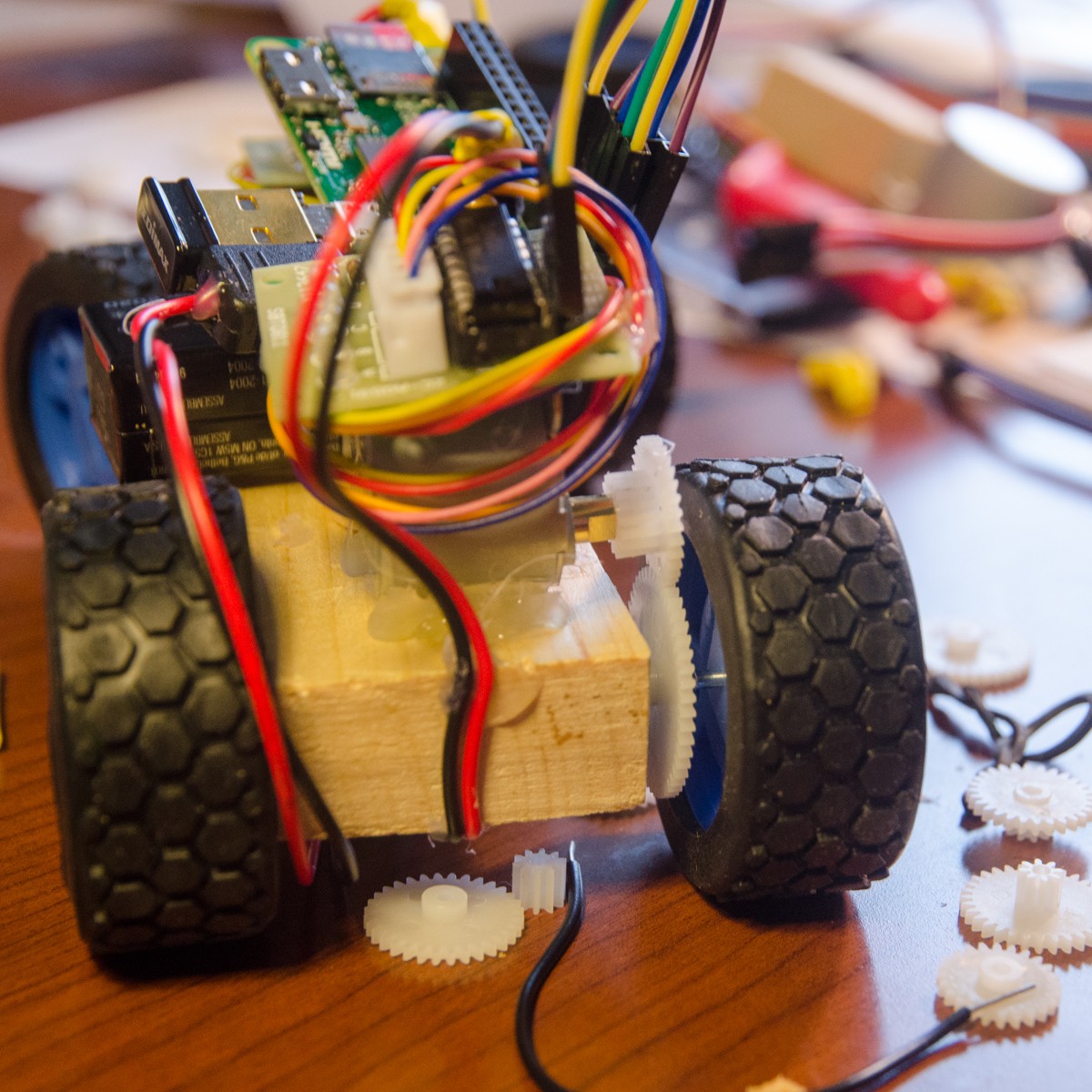
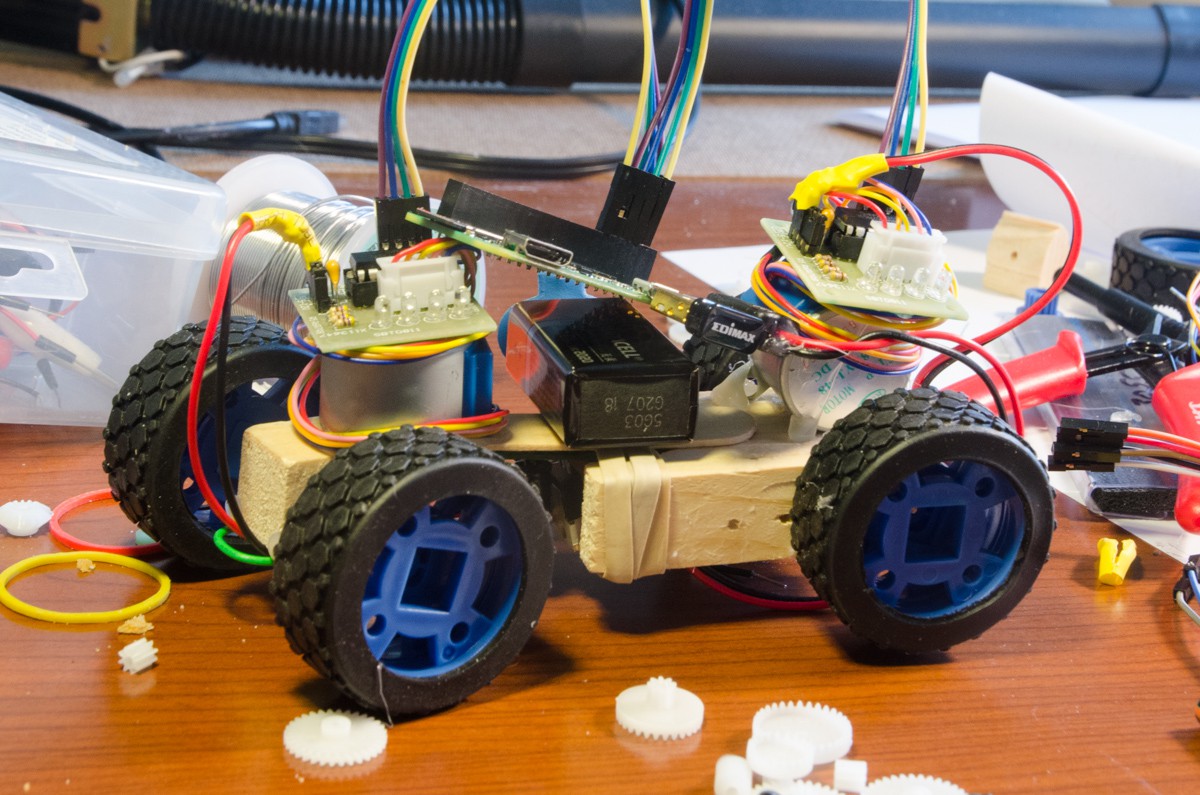
05/17/2016 at 06:21 • 0 commentsAfter the success of my first robot car, I wanted to make a better one. I changed one of the stepper motors to a small DC motor, and I needed a new body as well.
First I bought some micro DC motors, andI suffered a lot to make them move my robocar. So now I understand physics much better, and my car is moving as well.
![]()
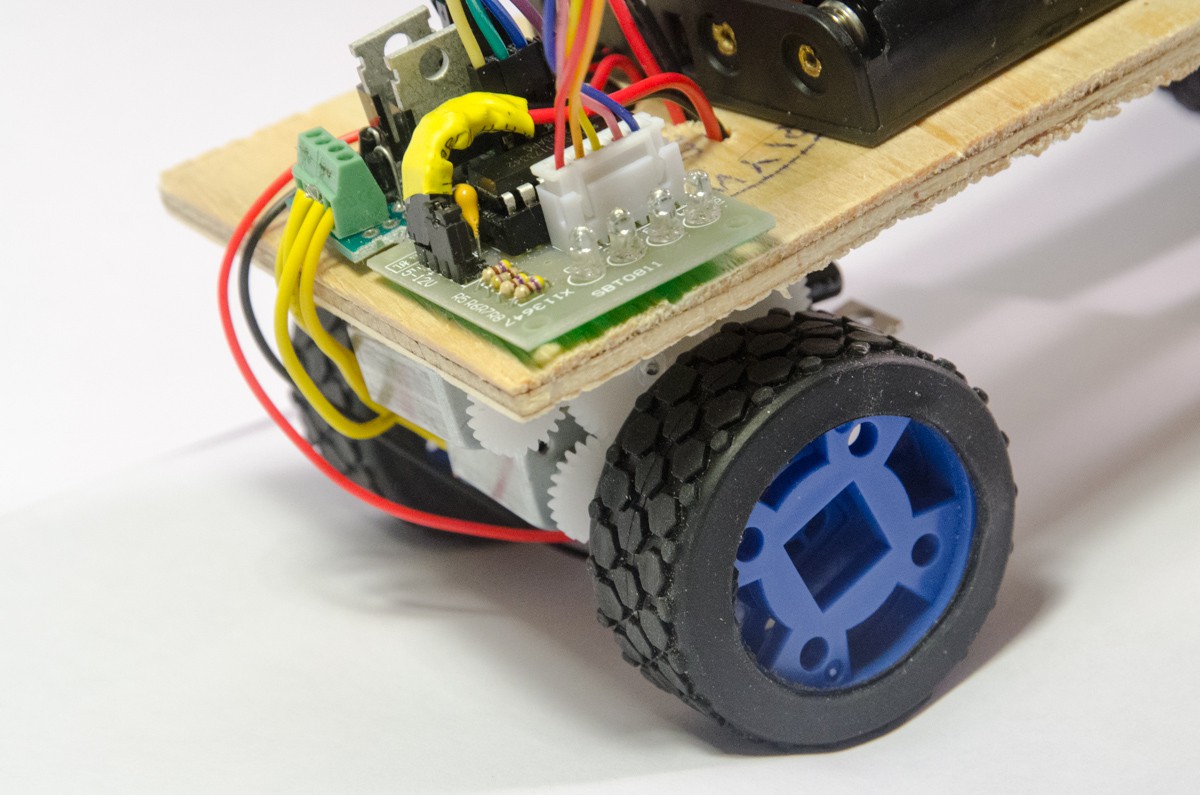
I had no H-bridge yet, so I could not change the direction of the motor. I tried to built my first h-bridge, but I had to recognize that an n channel MOSFET was different from a p channel MOSFET. And H-bridge needed both but I did not have but one type only. So I choose an easier way. I put two DC motors into my car, so one could move forward and the other backward. The motors were driven by a simple switch with MOSFETs. (A motor needs much more current than a Raspberry Pi GPIO can provide.) I made a very small circuit with the MOSFETs and flyback diodes. I should add LEDs for debugging reasons.
![]()
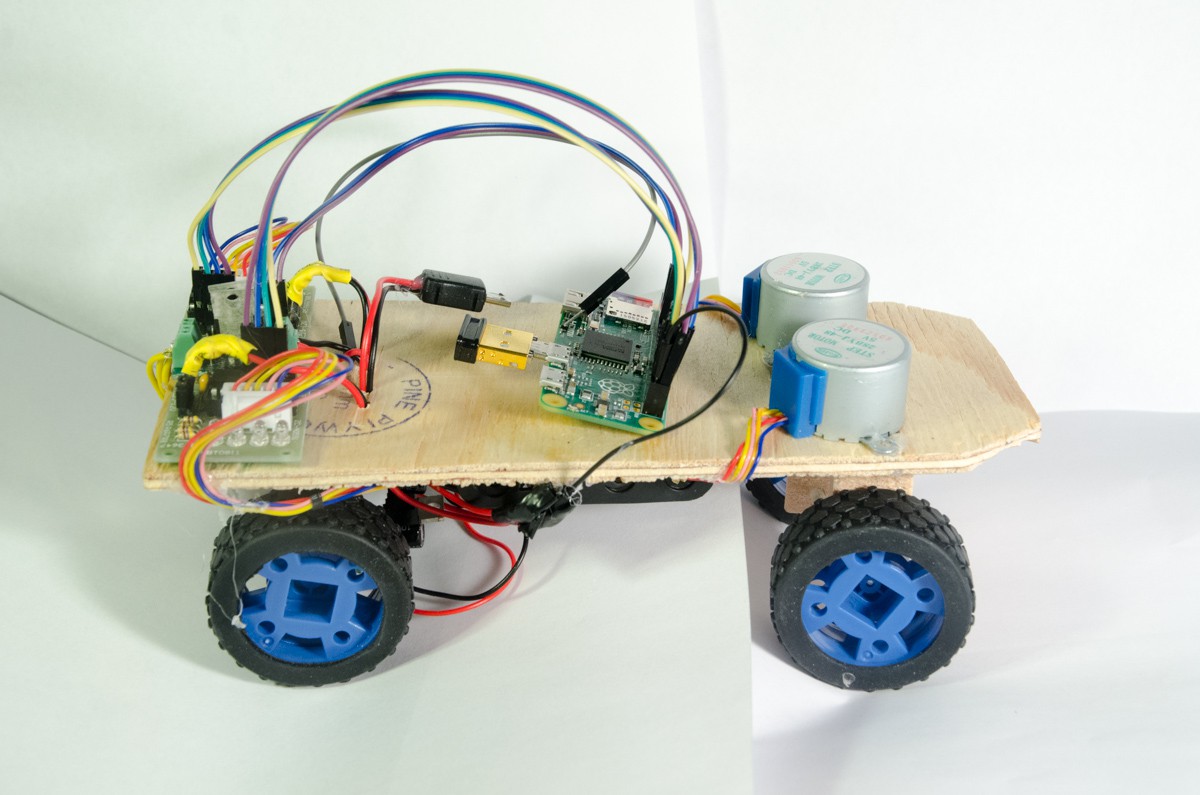
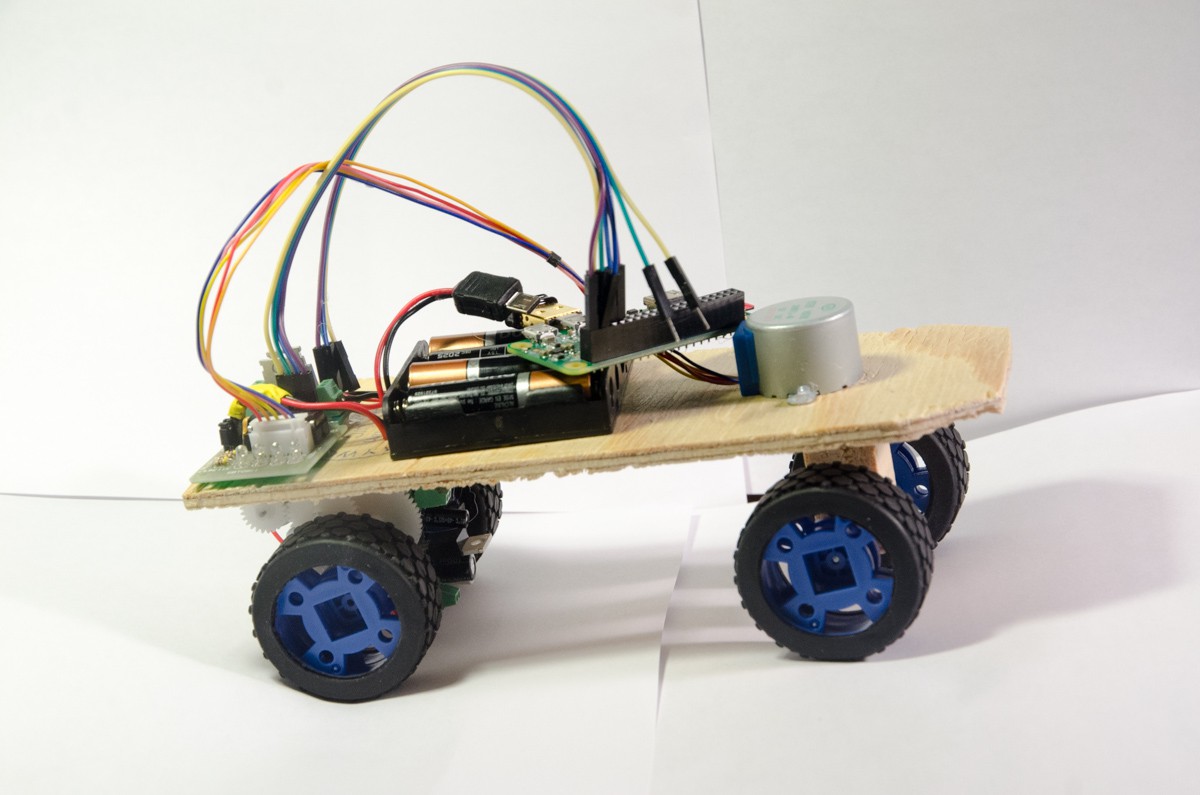
After a day of work, my RoboCar Zero v2 was ready to move. I switched on, logged in with ssh, and sent the first command to the new car: move. And my car moved. :D
![]()
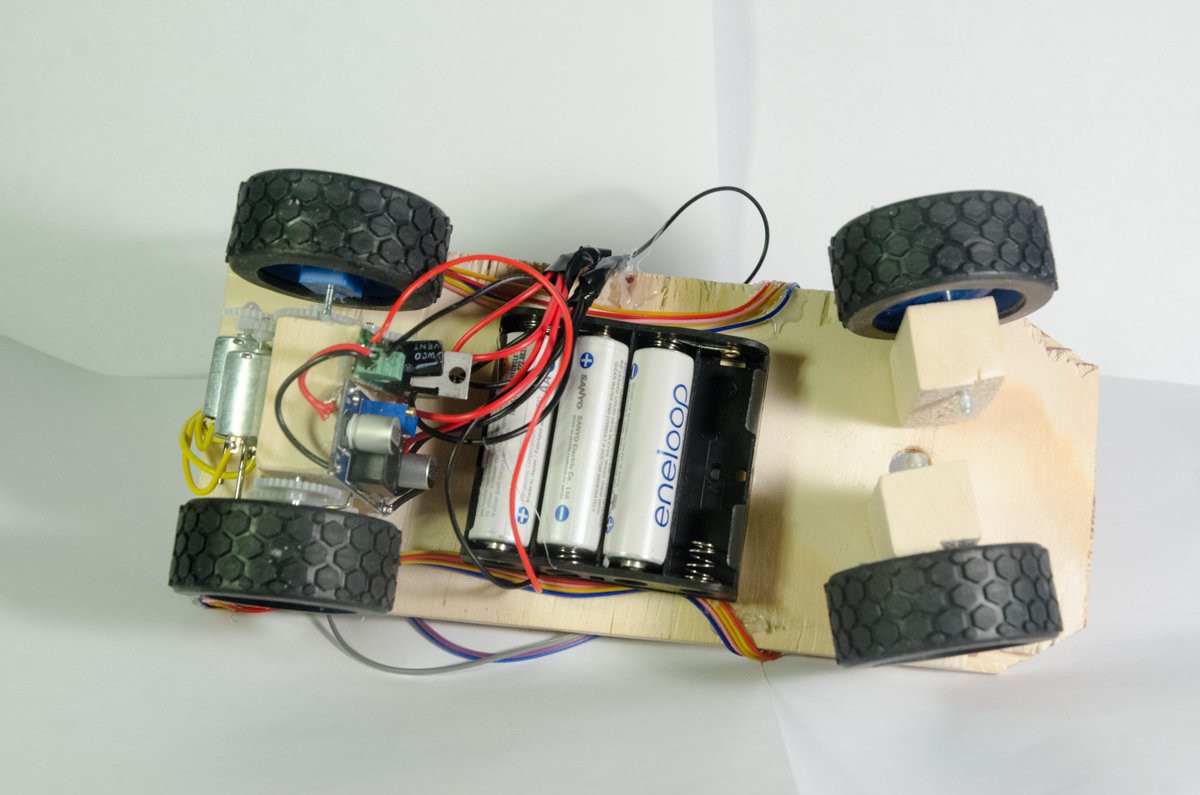
The RoboCar Zero v2 is not perfect at all. It has its strong limitations again:
- The stepper motor in the front is not strong enough to turn the wheels if there is not enough weight at the very end of the car. (But if I put too much weight there, the car cannot move.)
- DC motor needs a lot of power and the 4 AA batteries in series sometimes cannot provide enough power to the motors AND the the RPi Zero, so my Pi resets. I thinking of two different power circles for the future.
- I did not share the Python code yet, as it is underdeveloped yet. But next time I will.
-
DC motor and my mistakes
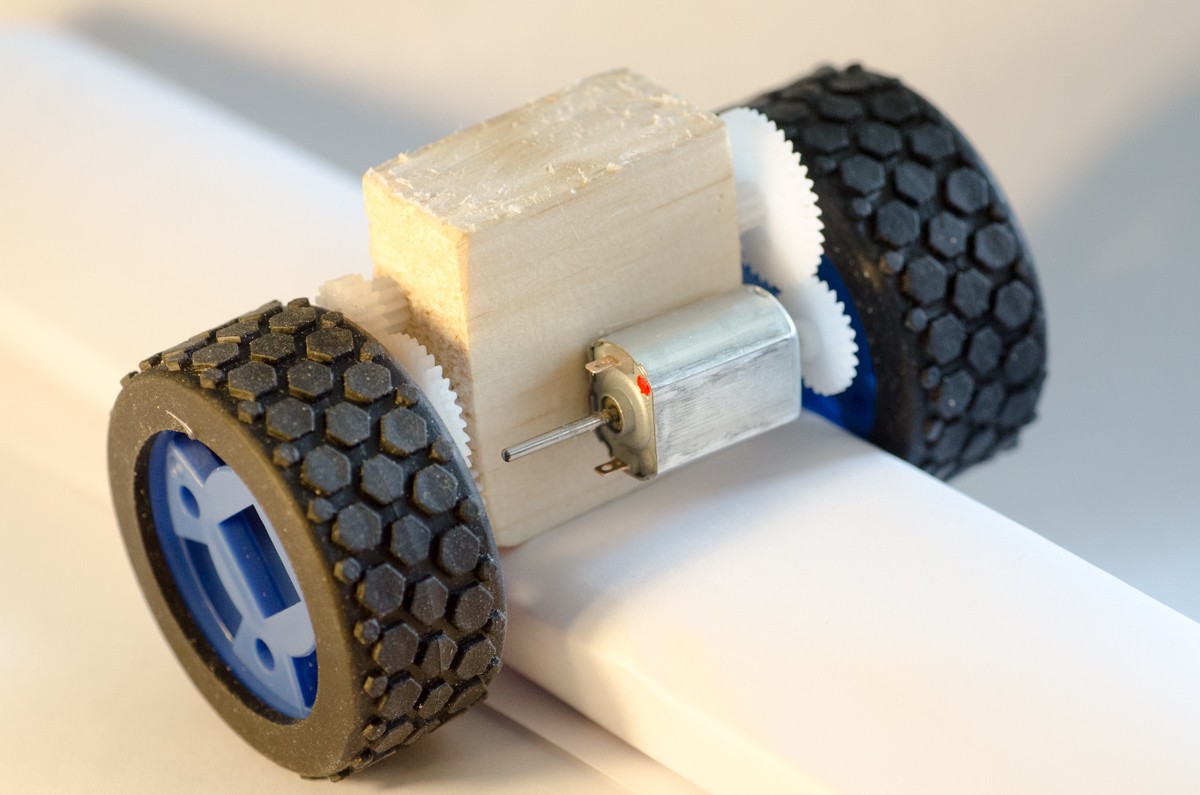
05/17/2016 at 05:58 • 0 commentsThe stepper motor of the RoboCar Zero v1 worked well, but my car was fast as a snail. So I bough my first cheap DC motors. DC motors are easy to use - I thought. But...
![]()
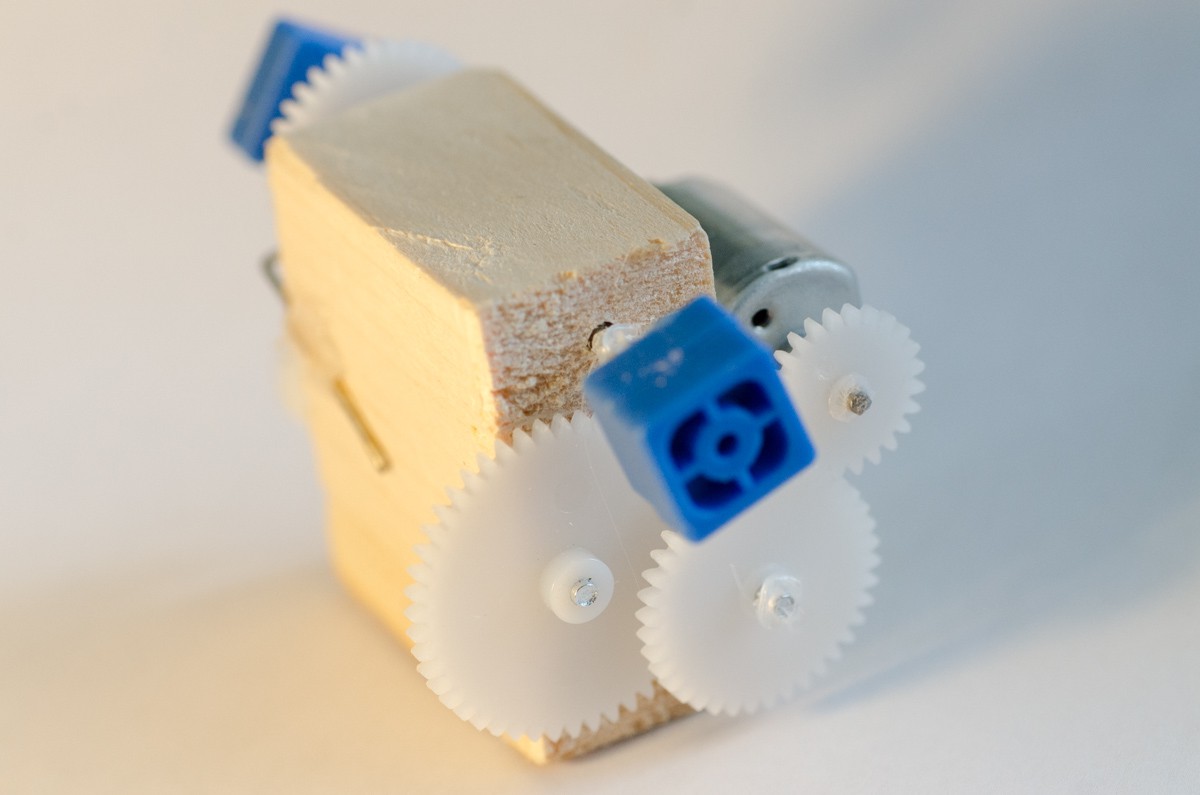
1) These micro DC motors are very fast (13500 round per minute [rpm]), but they are very week. So I had to forgot to put wheels on the dual axel shaft. The strength (torque) is so low, that the motors stopped immediately.
2) When a motor cannot move (stall) it consumes much more power (current). So it drains the battery pretty fast. Oh, and it becomes veeery hot.
3) Hot glue is a useful material for temporary works. But it is not good for DC motors, because DC motors tend to overheat and that heat melts the glue. And even worth, the melted hot glue can flow into the inner parts of your small DC motor so it will never work again. Never. Even if you open up and clean all parts.
4) Gears are important to make your robot move. Multiple gears (from smaller to big ones) do not improve the torque of the motor itself, but they reduce drastically the unnecessary speed (rpm) and they multiply the wheel's strength (we need that so much). With gears, the wheel turns one when the motor turns more than hundred times. So you have the torque of hundred rounds of the motor in a movement of short inches ..
So you can choose: you struggle with micro motors and different gears, or you can buy cheap DC motors with built in reduces gears. I suggest to struggle with your own inexperience: it takes more time, but you learn much more. And the working gears are so beautiful and they make a nice sound as well.
-
My Very First RoboCar
05/16/2016 at 04:26 • 0 commentsI have big plan with DIY robotics, but no experience. So I thought to begin with something simple and form there I can go bigger and bigger. So I checked my drawers and I built my very first robotic car.
![]() After some hours my very first robocar waked. I call it RoboCar Zero (v1).
After some hours my very first robocar waked. I call it RoboCar Zero (v1). The 9V battery feeds the two stepper-motor drivers. The headless RPiZero is fed through a simple 5V voltage regulator + capacitors. I use 8 GPIO to control the stepper motors through a Python script. The body is a piece of wood and I used a lot of hot glue.
![]()
Because of the stepper motors it was very accurate, but also it was slow, weak, and it drained the buttery fast. So it had its limitation, but for my first robocar I was proud of it.
If you need more details write a comment and I'm ready to help.
RoboCar Zero
Underdeveloped robot car with stepper motors and a Raspberry Pi Zero
 After some hours my very first robocar waked. I call it RoboCar Zero (v1).
After some hours my very first robocar waked. I call it RoboCar Zero (v1).