 Oskar Weigl
Oskar WeiglI'm not a mechanical engineer. So what follows is probably not the neatest or most optimal solution. In fact, I would love to see a project with some improved setup. Nevertheless, I would like to share with you what I have learned from using these motors in my robots.
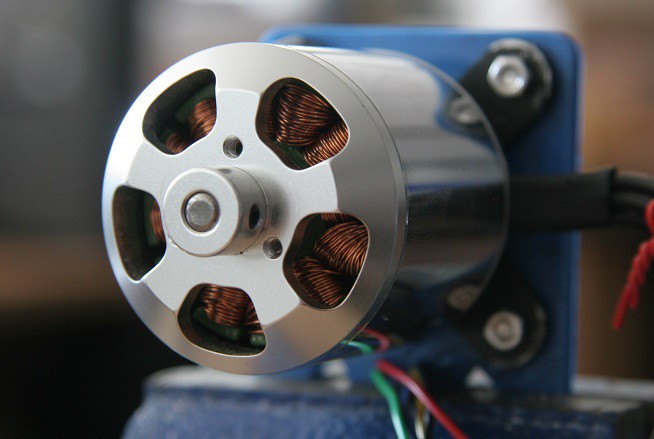
My favorite type of motor (so far) for robotics applications are the Turnigy Aerodrive SK3 series.

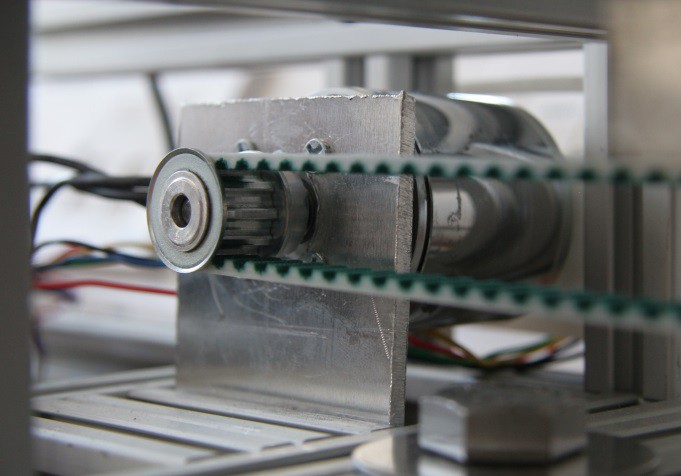
This is for several reasons. Apart from the things that almost all hobby motors have, which is low cost and high power, is that it has a low kv number (more on that later), and has the main shaft coming out of the "back" of the motor. If you look at the above picture, you can see that the mounting plate is on the same side as the shaft. This means that if you attach a pulley to the shaft, and pull sideways on it with a belt, the leverage from the bearing to the pulley is as short as possible. See the below image (which is from the rig you can see in the 3rd demo video) for an idea of what I mean:
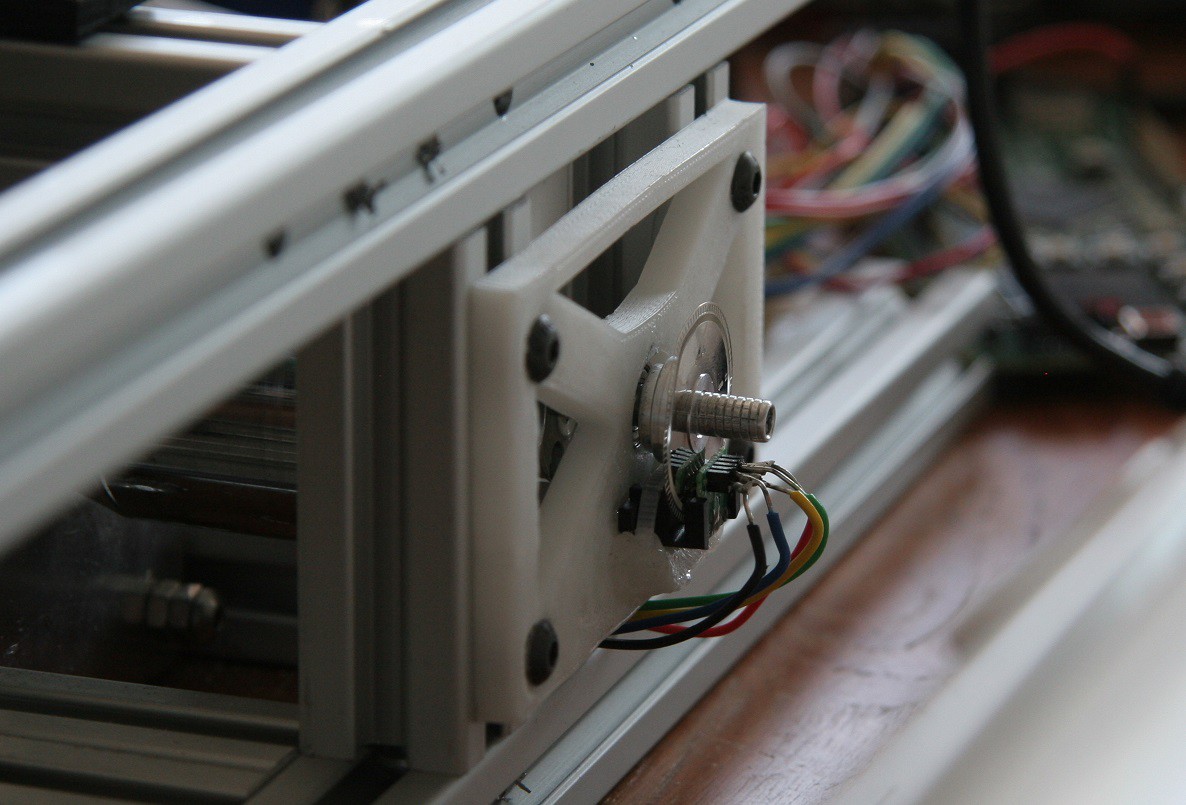
Another great thing is that they give you the possibility to mount something on the spinning side too. The motor even comes with an adapter that attaches to the seen trio of tapped holes and gives you a shaft:
This is perfect for attaching the encoder:
For your convenience, I compiled this table of motors that I have had good experience with. The motor used above is the Turnigy Aerodrive SK3 - 4250-350kv.
| Motor | Price $ | Power rating W | Peak Torque Nm | Weight kg |
| HobbyKing Donkey ST4010-820kv | 13 | 700 | 1.21 | 0.19 |
| Turnigy L3040A-480G | 20 | 1,000 | 1.79 | 0.19 |
| Turnigy Aerodrive SK3 - 4250-350kv | 36 | 1,200 | 2.36 | 0.27 |
| Turnigy Aerodrive SK3 - 5065-236kv | 56 | 1,850 | 4.21 | 0.53 |
| Turnigy Aerodrive SK3 - 6374-149kv | 80 | 2,250 | 7.77 | 0.84 |
Pick your motor!
I made this spreadsheet to help you pick out a motor for your project. Let me know if there is something that needs explaining, or adding.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
What exactly do the manufacturer's motor "Product Specifications" refer to? I.E. what are "[Max} Power", "Resistance", "Max Current/Torque", and "KV"?
Are you sure? yes | no
Very nice project! I am excited to buy at least one unit, when they come out!
I have two questions:
- I am not able to view Altium sources, so I cannot find out the physical dimensions of the board. What are they?
- What is the encoder you are using in https://cdn.hackaday.io/images/3856261462715696190.jpg? Where can I buy them?
Are you sure? yes | no
Some of the motors from the spreadsheet do have conflicting weight specs on hobbyking. Take this one for example: https://hobbyking.com/en_us/turnigy-aerodrive-sk3-4250-350kv-brushless-outrunner-motor.html
In the specs it says 266g unit weight/423g weight. Do you know which one is true? Did you confirm the weight specs in your spreadsheet?
Are you sure? yes | no
I think the weight in the description is the correct one. The one next to the stock status is shipping weight, I believe.
Are you sure? yes | no
Thanks for a good, informative post!
Are you sure? yes | no
Thanks! ;D
Are you sure? yes | no
My other question was about shaft diameter. Now I see that of the motors I posted before, none of them are a good match. The other critical thing to consider for me is availability of pulleys. The ones I get all have a 5mm bore, which means that only the 42mm series (as you have shown in your picture above) make sense. So I think I'll be ordering this one: http://bit.ly/2bHK9VP. Do you have opinions about the length? Personally, I'd prefer the shortest one possible.
Are you sure? yes | no
I looked at all your suggested options in your other comment, and the one you picked here I think is indeed the best out of all the ones you suggested. You basically want as high max_current/kv as possible, as that gives you the highest torque. Most of the hobby motors are quite high speed, low torque for direct drive applications, such as pulley-belt linear actuators. So going as high torque as possible is usually what you want.
How much torque you will actually get depends on the cooling you do, like will the motor always be spinning, and hence cool itself, or will you provide a fan with forced air cooling? Or will you just rely on intermittent motor spinning to move the air in the motor? What is the duty cycle of the system? What torque do you need?
If you can answer these questions, we can calculate if your motor choice is sufficient, or if you need to go up a size.
Are you sure? yes | no
Thanks for your reply! At the moment I do not have any requirements other than to have a basic linear axis that can be incrementally augmented. I just want something to reliably test the ODrive
Are you sure? yes | no
@Dave: Okay, cool! Yeah then the Aerodrive SK3 - 4240-530kv looks fine! ;D
Are you sure? yes | no
@Oskar Weigl sadly, those are still out of stock, so I'll have to wait until I can get some. And for some reason, I cannot reply to your latest comment, so I just replied to this one. :)
Are you sure? yes | no
You've reached the maximum reply depth.
Are you sure? yes | no
@PointyOintment Ah, thanks. :) @Oskar Weigl I don't know when those are going to be in stock, so I decided to just order a higher KV model, operating under the assumption that all of the mounting points will be the same.
Are you sure? yes | no
@Dave: Okay cool!
Are you sure? yes | no
Do all outrunners have this configuration? In other words, if I buy *any* outrunner from HobbyKing, will the mounted/fixed side always have the bearing and shaft protruding such that I can mount a pulley there? And will the bell side always have the mounting holes for the prop shaft (to be used for mounting an encoder)?
Are you sure? yes | no
Never mind, I see you said "almost" all. I have found a few possible SK3s to order: http://bit.ly/2chWa5c, http://bit.ly/2bHJyDS, and http://bit.ly/2bOdNGF. Do those seem reasonable? I would think the lower kv, the better. I also have another question which I will post separately.
Are you sure? yes | no