caver.adam
caver.adam-
Running [slowly]
10/04/2016 at 03:34 • 2 commentsSo, it is running now. Slowly. It's running about 1/10th the speed I had planned on. I've ordered a memory module which should help me speed up some...but I really need a better way of writing to the SD card that is faster.
Also, when I removed all the SD writing code it is turning slower than it was the other day. I wonder if I accidentally changed a setting while doing all the other work.
Oh well. Speed optimization later. Now I'm charging my batteries. One of them is giving an error in the battery charger. It may be dead from me draining it too far.
Next step is to convert the output to a point cloud that can be read by other files. Processing here I come.
-
SD cards are slow [for low RAM systems]
10/03/2016 at 13:03 • 0 commentsI've been making progress on the project and have it very close to running. I was able to get some outputs yesterday, but VERY slowly. I've run into a problem where the SD card latency is a major issue in scanning speed. So instead of writing to the SD card every reading I need to save them up and send them in chunks. Unfortunately, I only have enough memory to save up to 640 bytes of information before sending it to the SD card. That means my scanner pauses every 320 readings [of two bytes per reading] in order to send the data to the SD card. It's taking 9 seconds to scan one pitch rotation and save to the card. This compares to 0.9 seconds to scan and throw the data out over serial.
Other than that, I had some issues with odd values being output. But, the TestSF30 function outputs correctly, so I may just need to compare the code for collecting and converting results.
I was trying to get a scan it late last night before I quit...but my batteries quit first. So, tomorrow night to get a scan out.
-
Progress cont'd
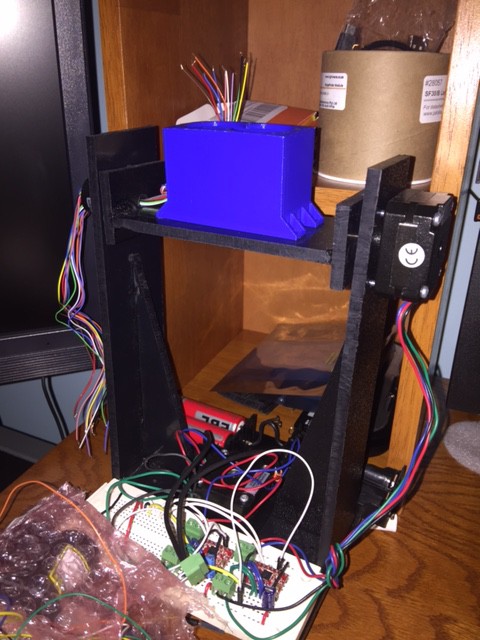
09/29/2016 at 13:12 • 0 commentsThe project is currently hooked up entirely on the old gimbal I made some time back. Also, the code for each individual part of the project works. Bluetooth, hall magnet detection, SD card, SF30, motor driving. Now it's just a matter of combining everything.
Last night [before I ran out of time] I wrote the code to perform a scan of the room. But I was having the Arduino crash on me in mid sentence. Literally -- it was crashing in the middle of serial outputs over Bluetooth. I suspect I'm either running too much serial too quickly or that I'm having some sort of buffer issue with Bluetooth module. I'm going to try to mess with some strategic delays and with shorter sentences being output across Bluetooth sometime in the next couple nights.
Soooo close to getting a first scan.
-
Progress
09/27/2016 at 04:36 • 0 commentsToday the circuit is assembed except for the SF30-B module. I want to be rested when I check the wiring again for a third time. Really, really don't want to fry my $450 sensor. But the motors, SD card, Bluetooth, and microcontroller all work. Thanks to a local friend Tim from the local hackerspace who pointed out that I was driving my Yaw motor too fast and that's why it wasn't working. I think the pitch motor can still go 50% faster (test required). GitHub has been updated, but lots of small details left to complete the code.
Took a boring video, but you can glance at it for 10 seconds to see it doing it's thing. I turn the scanRoom function on with bluetooth and it starts running. It's running at just over 1 cycle per second. Video was with a handheld cell phone. Hard to tell much. More videos once I connect the SF30 tomorrow.
-
Waiting on Connectors
09/26/2016 at 14:25 • 0 commentsDidn't get nearly as much done on my project this weekend as I had planned. Tried to plan out an enclosure to be 3D printed, unfortunatly my original design wouldn't fit on my 3D printer. Leaves me with the option of redesigning for 3D printer, laser cutting, or other.
But, after doing that my circuit boards arrived, so I stopped working on the enclosure because I already have a stand that will work for testing purposes. Started soldering my board, but my connectors from Amazon were "delayed" in transit. Hopefully they will arrive today to finish wiring the project up.
One new problem on the circuit board: I planned to use screw terminals but I made the holes [barely] too small to hold the screw terminal pins. 5 seconds with a file and they fit. Oops.
On the bright side, I built a new shed door, and sweat out a gallon in the heat working in the yard. That should leave me time to work evenings on the project this week.
-
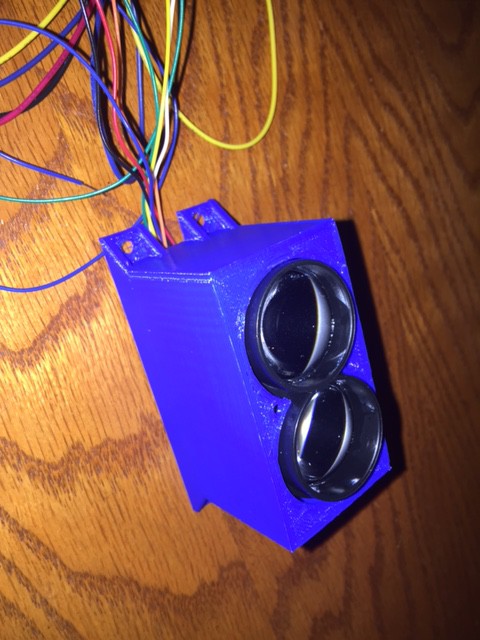
SF30 mount
09/23/2016 at 02:32 • 0 commentsPrinted my SF30 mount tonight. Fits well. Nice to have this ready to go.
![]()
![]()
![]()
-
Waiting on PCB...learning 3d printing
09/21/2016 at 13:59 • 0 commentsStill waiting on the PCB to arrive. In the meantime I'm working on learning to tie up some loose ends.
Last night I made my first 3d print. Trying to see about making the body a lot more usable in a cave. It would also be a lot easier to assemble for anyone with 3d printer access (or money to order a print). And a 3d print will be a lot more precise than my jigsaw for making sure that the laser is centered on the axis of rotation. So, while I wait for the PCB to arrive, I'm working on making models for a new revision to the body of the 3d Lidar.
-
Lidar-Lite 3 is announced...but due after Hack-a-day prize deadline
09/15/2016 at 17:38 • 0 commentsSo I've been waiting on the Lidar-Lite 3 and hoping it might come out before I finished the project. I even wired the project so that I can switch out sensors by plugging the new one into a socket that is there and waiting. But sensor probably wont be here in time for the prize. So...keep working! I'm almost done with using the SF30-b so I'll get that up, running, and tested while I wait for the LL3 to come in. This should make a good comparison test anyway.
The LL3 has advantage in the accuracy, the resolution, and the fact that it can return an intensity (to create a black and white image). The SF30-b has an advantage in speed, range, and laser beam divergence.
-
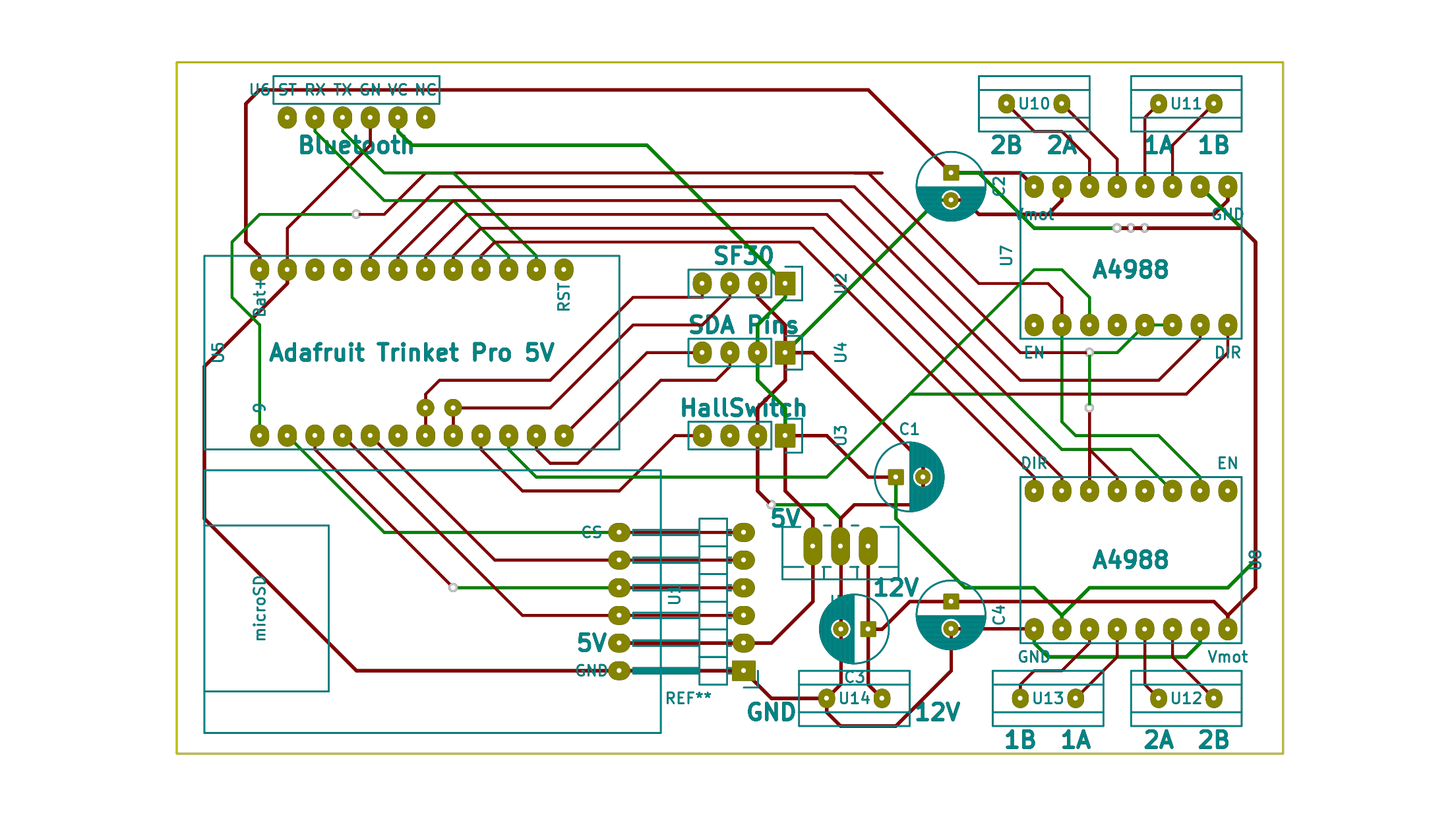
Ordered PCB
09/15/2016 at 00:50 • 0 commentsordered the OpenLidar PCB. Checked the paths, made sure everything was connected. And...forgot to put the name of the project on the top silkscreen. Heh, here's hoping that's the sacrificial lamb.
![]()
![]()
-
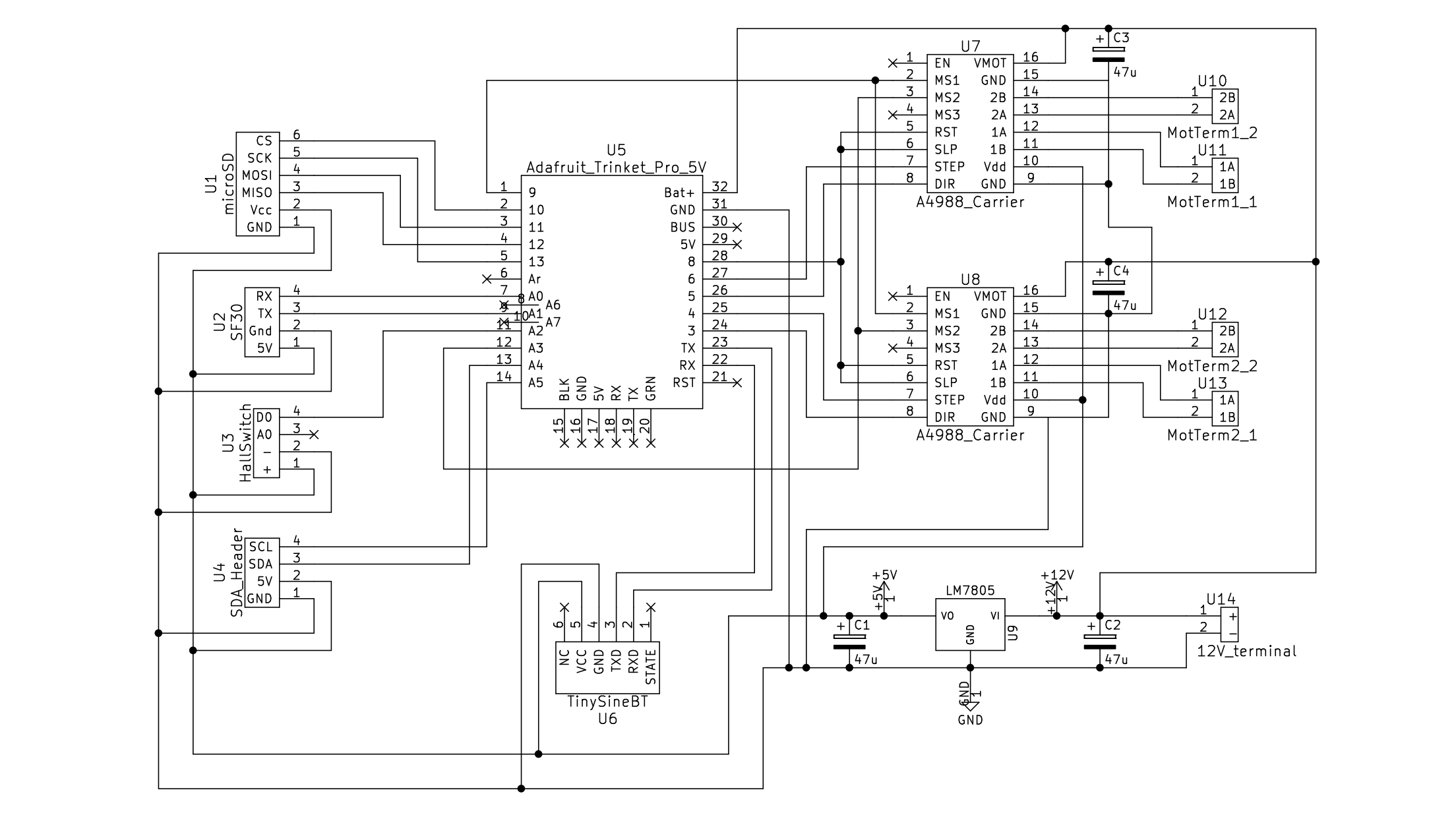
Learning KiCAD
09/12/2016 at 01:05 • 0 commentsSo...it took me a bit longer to learn to use KiCAD than I had expected. But, I've entered the schematic now. And I've learned how to create PCB footprints. Hoping to get this circuit board on order tomorrow. But tonight I need to sleep so I can have energy to verify the schematic after work tomorrow. Measure twice, cut once.
[Image removed. See revision 1a PDF file in the files section for updated schematic].
Open LIDAR
This project is to build a motorized gimbal mount to convert a laser distance module into a 3d LIDAR.