caver.adam
caver.adam-
Circuit is verified
09/10/2016 at 22:33 • 1 commentToday I got the SF30 hooked up and running. I'm getting a few errors on the serial port. For instance it will go from 1.9 meters to 150 meters without me moving it. Not sure why these errors are occuring. Will have to contact the manufacturer. But...that was the last component.
Tomorrow I'll start working on designing the PCB. This double breadboard is too big to put on my little gimbal.
-
SF30-b first plug-in
09/09/2016 at 00:28 • 0 commentsHad a few minutes tonight so I plugged my brand new SF30-B into my USB port and grabbed some data. Ran out of time before I could plug it into my project (which doesn't matter much because I can't get this Bluetooth module to run at more than 9600 baud without a USB to TTL cable). So I ran a couple quick checks of the sensor data using excel.
I still need to test whether this thing is really temperature sensitive. It looks like it is because my values at the start of the test were in the 0.26m range, but at the end of the testing they clustered higher. This seemed to happen for both modes. Also, when I first turned the module on I had some REALLY low values, but that was first time turning on. More work needed on determining a warm-up period.
The smoothed mode does a really good job with the laser and a stationary target. I'm guessing that this mode may cause problems on a LIDAR though. Time will tell. There is much more variation in the 0.03 resolution mode. If I used this mode I will need to see if different data rates have an impact. Otherwise I'll have to throw a digital filter on this. A range of 3cm I can handle. A range of 12cm is too much.
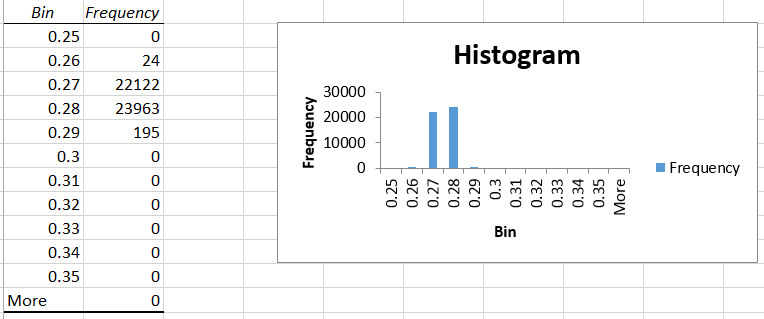
Smoothed:
Distance Mean 0.275254 Standard Error 2.36E-05 Median 0.28 Mode 0.28 Standard Deviation 0.005087 Sample Variance 2.59E-05 Kurtosis -1.72543 Skewness -0.01761 Range 0.03 Minimum 0.26 Maximum 0.29 Sum 12745.37 Count 46304 ![]()
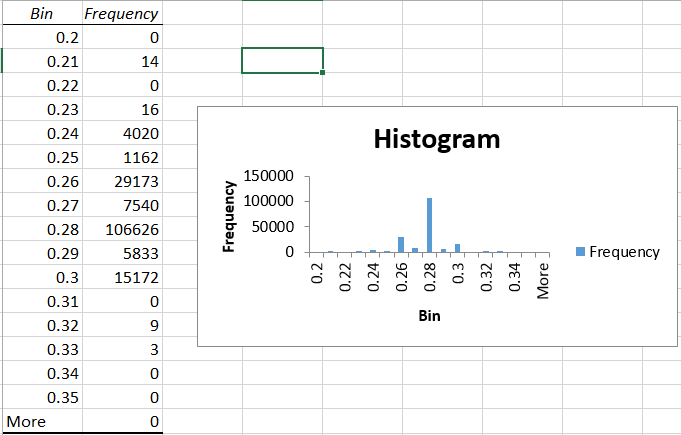
0.03 resolution:
Distance Mean 0.277086597 Standard Error 2.96305E-05 Median 0.28 Mode 0.28 Standard Deviation 0.012201442 Sample Variance 0.000148875 Kurtosis 1.125499347 Skewness -0.595383425 Range 0.12 Minimum 0.21 Maximum 0.33 Sum 46985.02 Count 169568 ![]()
This weekend I need to connect this through my arduino to verify my wiring. Hoping to get a circuit board designed over the weeked if I can get my brother moved quickly enough.
-
Progress Report
09/08/2016 at 02:30 • 0 commentsMade some progress on the project over the last two days.
1) Steppers - working
2) Bluetooth - working (only outputting serial at 9600 baud)
3) microSD card - working to write data
4) hall effect sensor - working (switching mode only)
5) SF30-b Laser Distance - arrived in the mail this evening.
6) schematic - partially completed (needs bluetooth update and SF30 verification)
7) pcb - part layout completed pending verification of connections for traces
8) gitHub - up to date
I had a little snafu last night with the bluetooth module. Somehow as I was going through connecting GND to GND and Vcc to Vcc I was on autopilot and hooked up the TX of the arduino to the TX of the bluetooth. Nope, today it him me that TX goes to RX and RX goes to TX. Doh, senseless waste of 2 hours.
Second pause happened tonight and took me about 15 minutes to figure it out. My trinket pro is only capable of outputting 150mA on the 5V pin and the SD card requires over 100mA by itself. No biggie, I temporarily changed to the BUS output at 500mA. This problem will go away when the board is powered by my 2A regulator (12V to 5V). I just had the 12V put away because I had too many wires in the way while testing these new modules. Oddly, this only took 15 minutes to fix and the super easy bluetooth issue took 2 hours. Oh well.
-
LIDAR Surveying with Faro
09/06/2016 at 14:21 • 0 commentsWent to a great event this past weekend and spent it using a Faro Focus 3D to work on a project to scan a cave. My good friend set up the event and it is the culmination of many previous trips. We scanned several thousand feet of cave over the weekend.
Also, this means I got some training on using the device. It was a bit disheartening to see how much better the Faro is. Today I need to remind myself that the goal of my project is good enough to be useful and under $1k. For my price goal I was never going to be able to compete with a $50k machine.
On the bright side, my sensor is supposed to arrive on Wednesday. Hoping to have time tonight to head over to the local hackerspace for some wire cutting and soldering. Proto-boarding tedium here I come.
-
Working on a draft schematic and pcb
09/01/2016 at 01:03 • 0 commentsonight I was using circuits.io to formalize the connections for the project. I'm not loving the way traces are drawn on the schematic, but its functional at least.
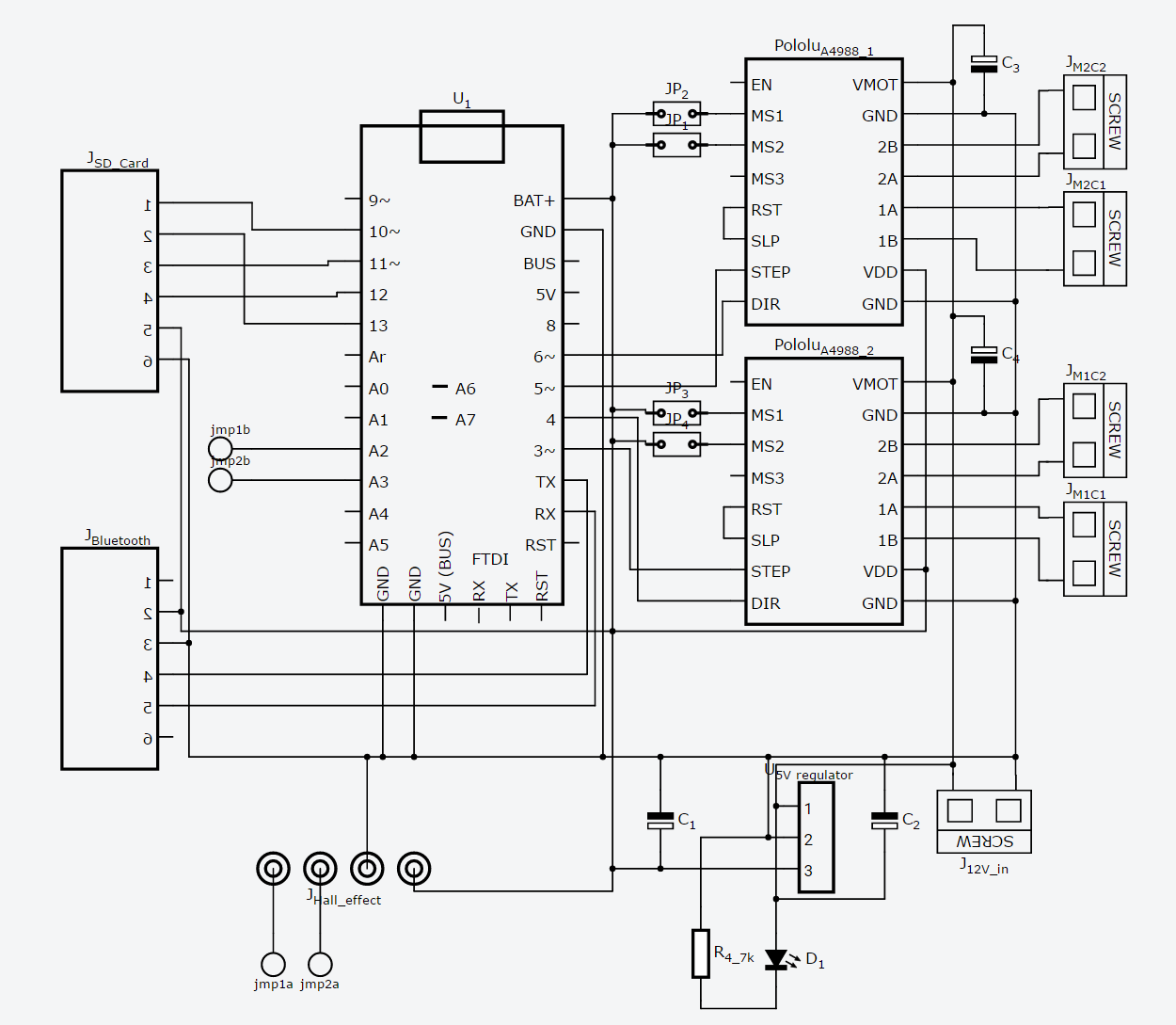
Draft 1:
https://circuits.io/circuits/2637767-openlidar-circuit#schematic
![]()
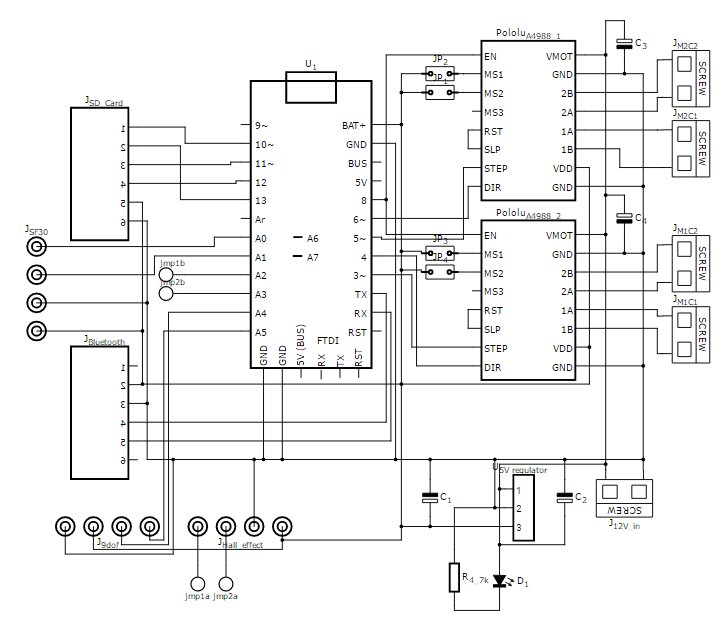
Draft 2 (including header for SF30 and header for either a 9dof board or Lidar-Lite):
![]()
-
LIDAR training and certification
08/31/2016 at 15:02 • 0 commentsThis Friday I'm going through a half day course on performing LIDAR surveys. Following that up with 8 hours of survey experience over the weekend. Time get get legitamate.
Up until now I've just been helping a surveyor and watching over his shoulder. Then he's been kind enough to share the data so I can manipulate it in Autodesk.
-
End of August to-do list
08/31/2016 at 12:59 • 2 commentsThere's a lot of things that need to get done in order to make this work. I've been putting a list together for myself but figured I'd share and see if people had suggestions for things that might be more critical than I have been thinking.
My objective is to complete a functional version of the build before I worry about testing, optimizing, and beautifying. So I'm not bothering to include later steps like, "sharks with freaking laser beams".
- Layout a proto-board including the bluetooth and micro-sd modules. This step is required because my breadboard doesn't have room for these modules (and because I have concerns about the breadboard holding together). (Note: setting up a custom PCB board falls under the optimization and beautification section)
- Add code to the project to interface the ATMEL chip with the micro-sd and then with the bluetooth. Micro-sd is necessary to record data (unless it is streamed to another device which can have connectivity issues) and I haven't added any physical controls to the project so I need the bluetooth as a controller. (This will be from public libraries)
- Store data in spherical csv format and find a suitable converter.
- Add the magnet and the hall effect switch to the gimbal so that the pitch can be set. Due to start-up jitter of the steppers, I can't predict where they will be pointed after start-up. Currently I have to physically overpower the stepper and move the pitch carriage into position by hand. This seems likely to wear out my plastic connectors.
- Add a physical connector for the SF30-B to the pitch carriage. I've ordered an aluminum connector, but it is set to connect the device at 90 degrees to the direction of the laser. Due to the center of rotation on my current carriage I will need to make adjustments.
- Modify available SF30-B code to work in this application.
-
Sensor Ordered
08/31/2016 at 00:53 • 0 commentsI have now ordered the SF30-b. I still need to do optimizing of the gimbal, but the motors work well enough to work for now. With funding available it seemed like time spent ordering necessary components was a better use of time than tinkering with digital outputs. I've also ordered a bluetooth module and an SD card module. Doesn't make much sense having data that you can't view. Very excited to see what this sensor will output.
-
Working Gimbal
08/20/2016 at 20:07 • 0 commentsMy Adafruit Trinket arrived today and I've been able to get the gimbal working. The first run did a half turn in the yaw direction (full room coverage) in about 16 minutes according to my video camera (and this can definitely be sped up still).
Video starts at 1x video speed, then jumps up to fast foward mode. I think we can all agree that a 20 second video is watchable and an 8 minute video is totally not. This video shows a quarter turn (half scan) run.
There are a few things that still need to be optimized on the gimbal that will be coming up in future updates.
1) Speed has not yet been optimized and I kept re-compiling the code until eventually I said, "Good enough for now, I want to see if this can run as a system."
2) There are a lot of oscillations when moving the yaw motor. For today I did two things to limit the oscillations: I made the motor run at quarter-step, and I put a friction pad between the tripod and the base plate to dampen the movement. I need to work on decreasing these oscillations a lot more. I'm using a bearing washer between the two components but am wondering whether a regular washer would be better. Also, this is a prototype and the mass is probably unevenly distributed.
3) The electronics are still patched together. This needs to be moved on from the breadboard stage.
4) Still working on sourcing the sensor. I got a notice again today that the LidarLiteV3 is still not ready. And the SF-30B is $449 which will take some time to save up for unless I pursue a grant.
-
New microcontroller on its way.
08/20/2016 at 15:54 • 0 commentsWaiting for my new microcontroller. Hoping it gets here today. Otherwise will have to wait until next weekend to get working. Travelling and projects seem to be antonyms.
Open LIDAR
This project is to build a motorized gimbal mount to convert a laser distance module into a 3d LIDAR.