0%
0%
Project Rockoon
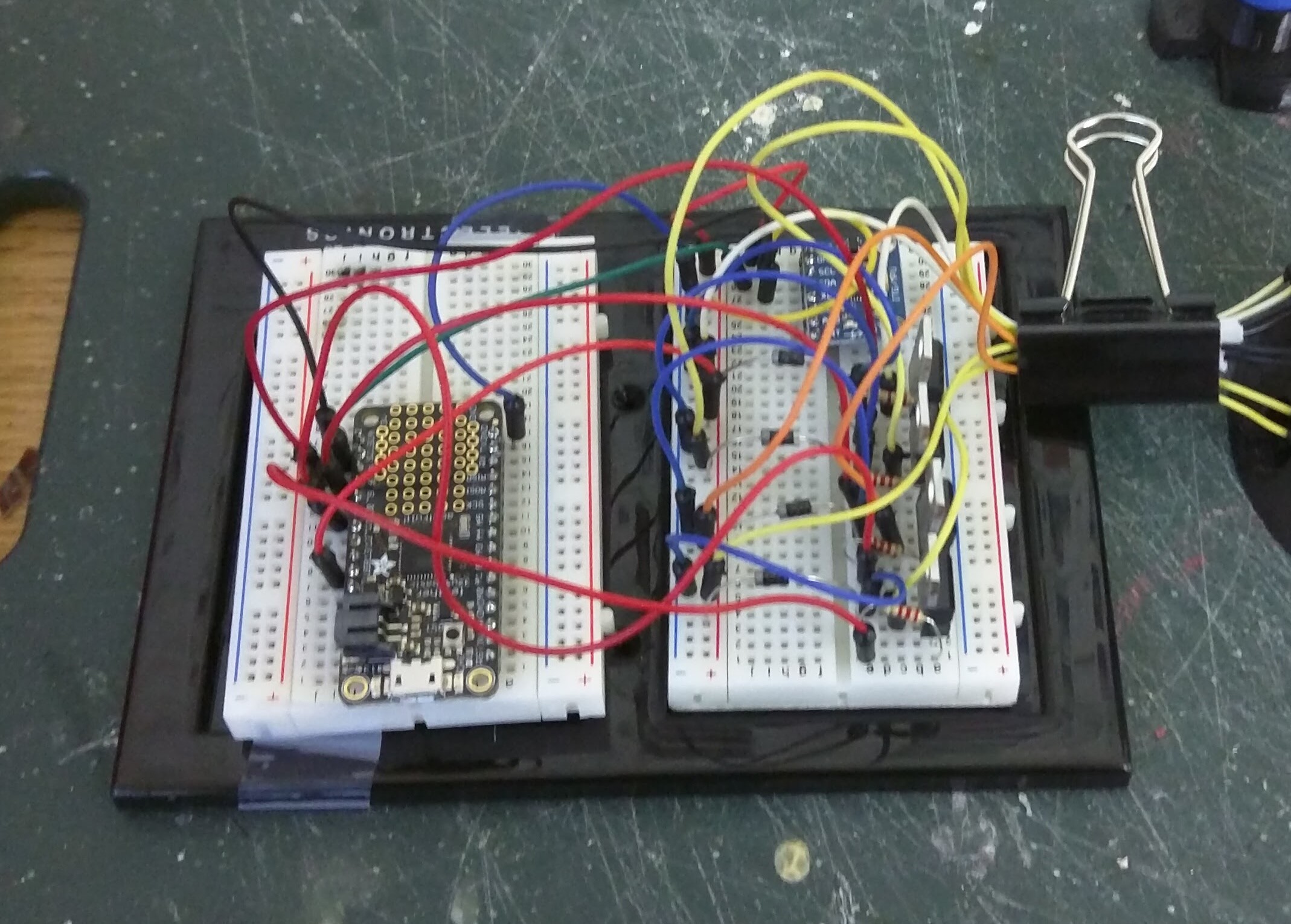
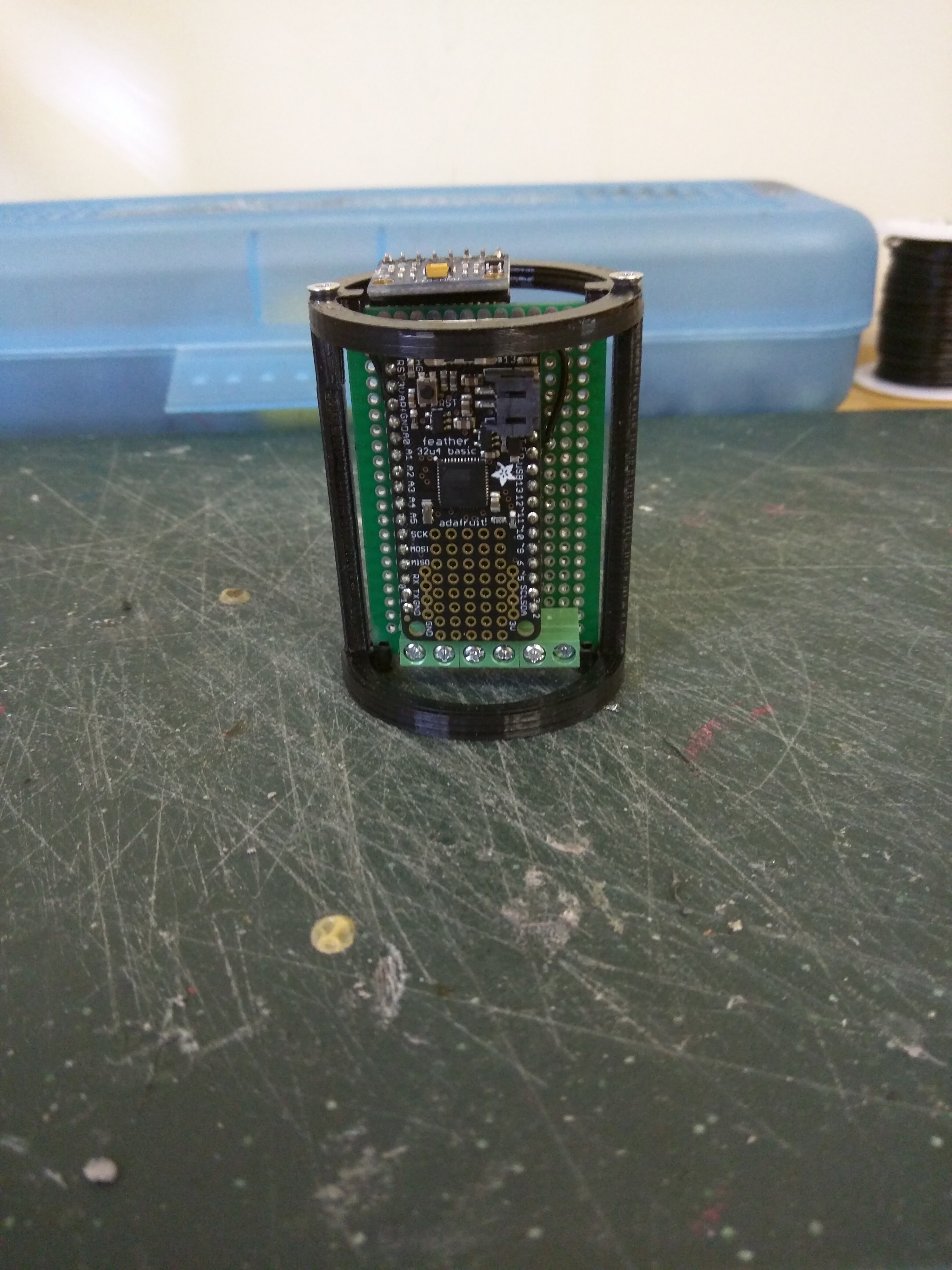
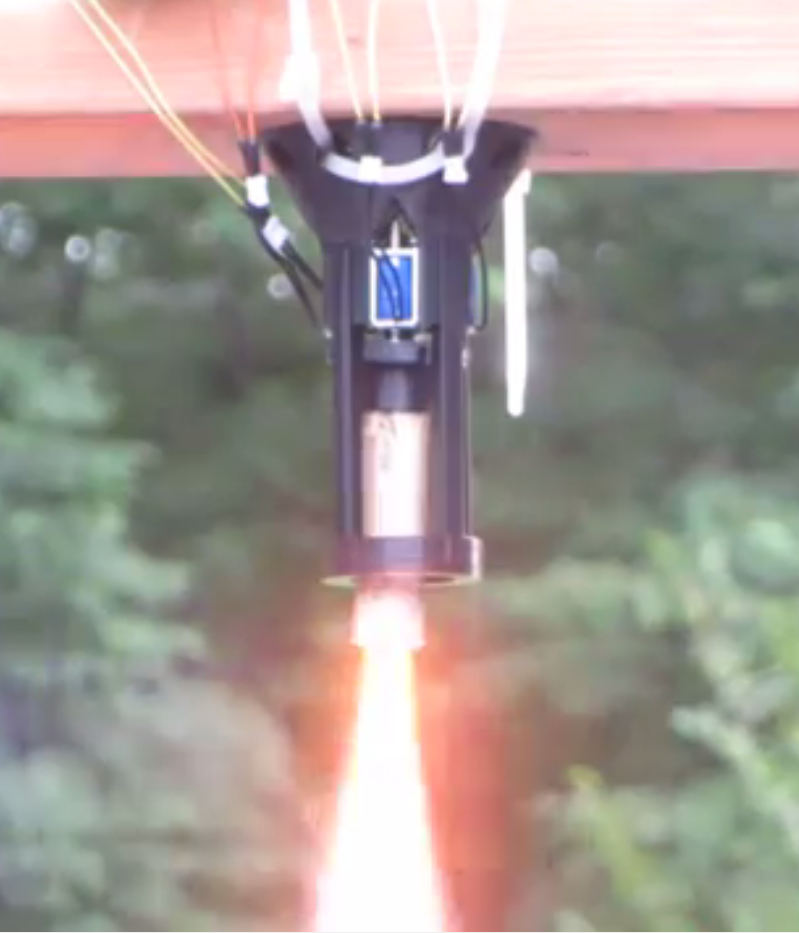
Actively stabilized model rocket by means of a motor gimbal, originally designed for launching a rocket from a high-altitude weather balloon
 Julian Costas
Julian CostasBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests















 James Hobson
James Hobson
 Glytch
Glytch
 Peter McCloud
Peter McCloud
A couple more thoughts to add ... I've looked at rockoons several times, and my own ground launched rockets get about 100k'.
Rockoons are cool integration of a number of technologies - one that folks typically don't include is the likely need for active, bi-directional positive control - that requires good communications. There a number of choices here from satellite communications (expensive and power hungry), to LoRa to long range WiFi.
But you will a good communications system for positive launch control.