 E. N. Hering
E. N. Hering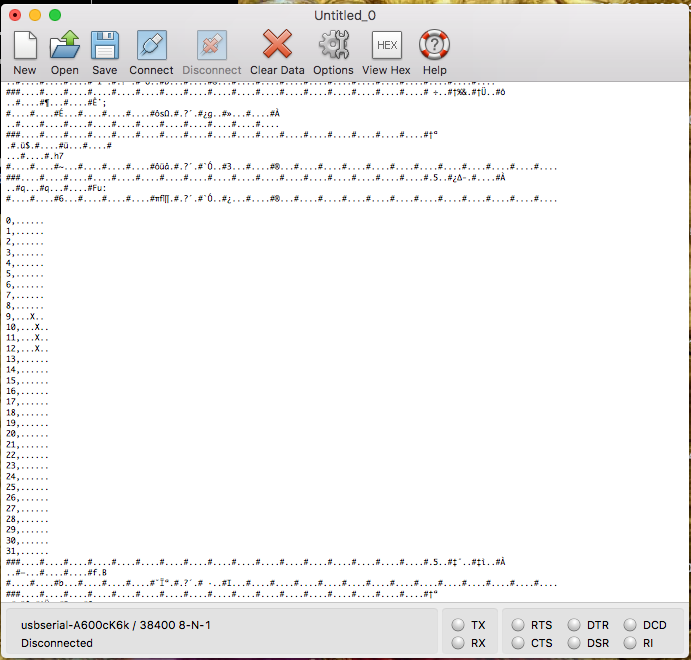
Today I'm posting a picture of the CoolTerm terminal connected to the communications module via a serial connection.
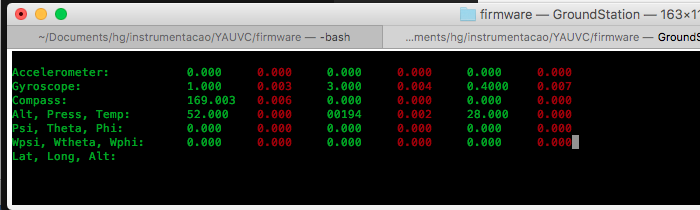
What can be seen are many telemetry sequences starting with ### and using # as a separator between the four bytes that represent each relevant system variable value. I made a small C++ program to parse the telemetry and show the data on the screen.
A tall matrix can be seen on the serial terminal too. Each line of the matrix represents a capacity that an installed module can have. Modules can have accelerometers or other sensors installed, for example. Or they can be able to pilot the vehicle, or they can control servos. All the current capacities are listed in the following link: https://pastebin.com/KBw1i5Ui
The matrix shows that the module installed on slot 4 have an accelerometer, a gyroscope, a barometer and a magnetometer.
By using a matrix like this the data from similar sensors can be fused together using this equation:
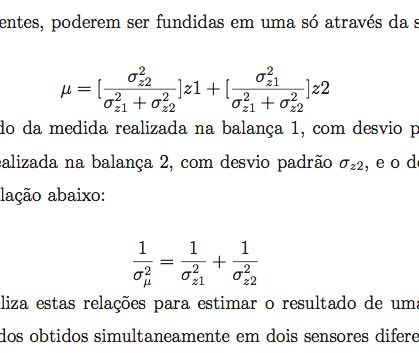
And this operation can be done in a simple loop, taking care of the possibility of sensor redundancy in a very simple way.
Your comments are important and welcome.
You can find me online on the #avr and #sparkfun channels of the Freenode IRC servers. People from those channels are very nice and have contributed with solutions to programming problems and hardware related ones.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.