Johannes Hassler
Johannes Hassler-
New Problem arises: Flex Spline Delamination
09/13/2018 at 22:29 • 1 commentAfter some testing an a lot of Time i found out, that delamination of the flex spline is happening in all of my Flexsplines of the second generation (the first available STL files).
![]()
The Gear still works ok, I have to look how to prevent that in the future though. One solution could be to adjust the line thickness down a bit to get a better adhesion.
Another one could be to rely on only one perimeter - at the risk of braking the flex spline vertically. This solution would benefit from a bigger nozzle diameter.
This happens because of stretching and contracting forces while bending the flex spline. Counter measurements other than print settings include 1. lowering the stresses through a bigger bending radius (means bigger bearing or more bearing to get a flatter stress gradient in the flexible bit) and 2. exchanging PETg for something softer, like the NinjaTek Cheetah Flexible Filament.
As the unique selling point is to print this gear with one type of filament, I try my best to succeed with PETg as filament.
-
CAD Changes 13.09.2018
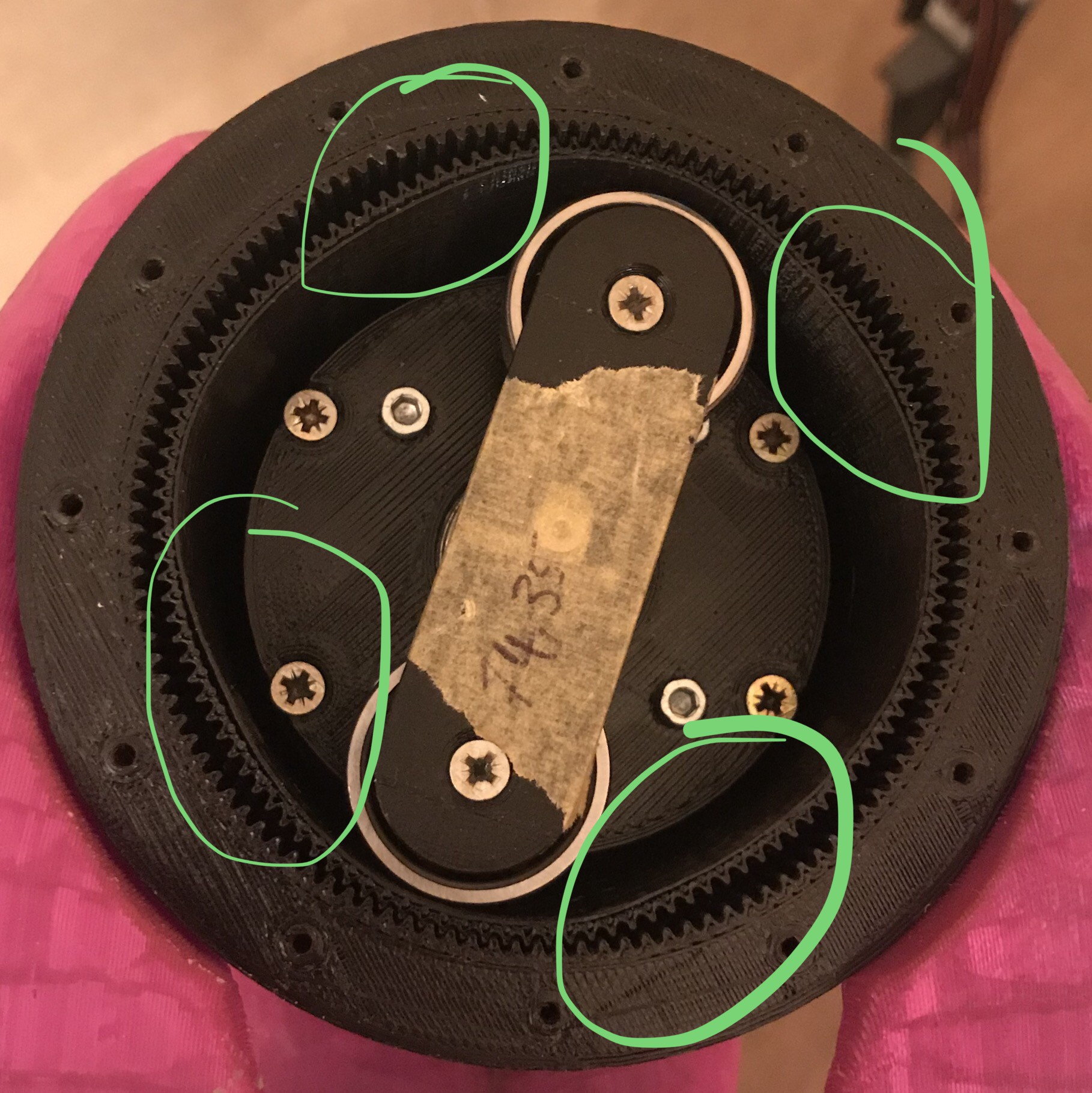
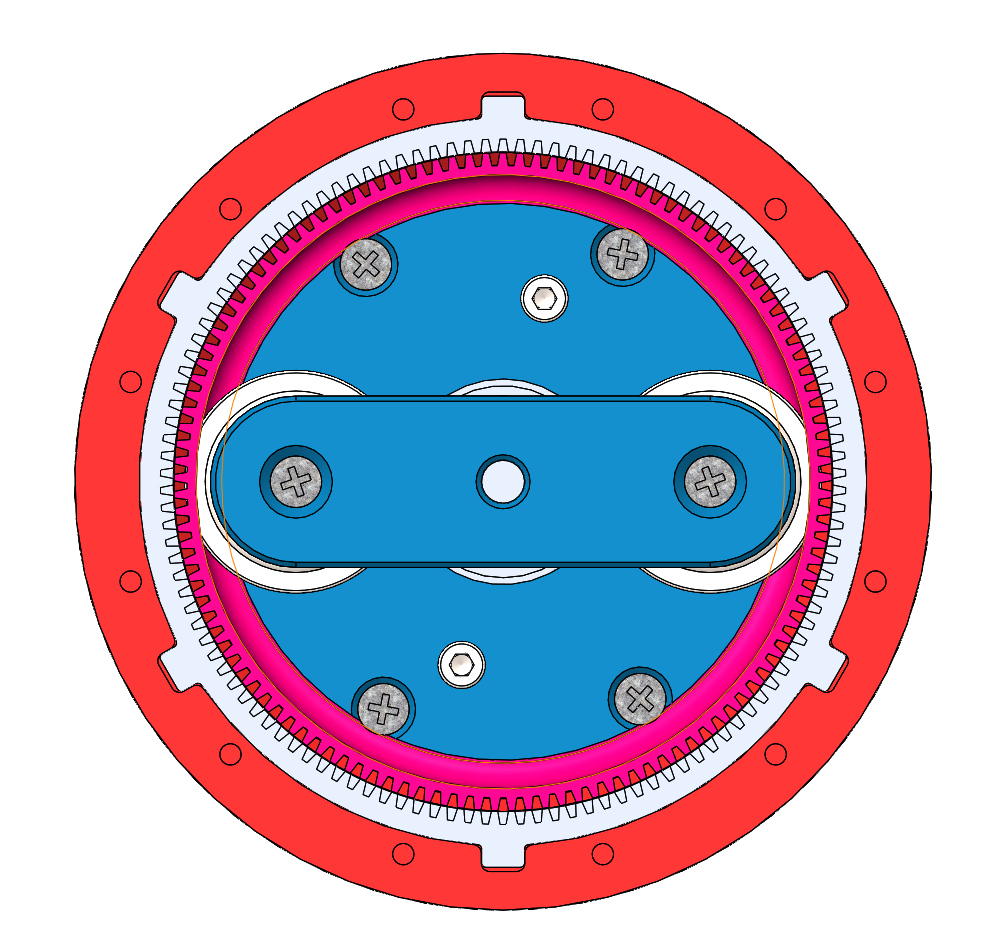
09/13/2018 at 22:08 • 0 commentsI just updated the CAD-Files. Now the Circular Spline and the housing are two seperate entities, this allows for a fast iteration on tooth profiles as one doesnt need to print the biggest part of the assembly over and over again. Instead of a dovetail geometry i went for rectangular keys for this version. I figure the fitting might be difficult wit the dovetail and it doesn't provide more strength than rectangular keys.
![]()
Also I changed the shape of the teeth to be less triangular and more "parallel" - the base part is now 0.75mm with an internal tooth angle of 20°. I'm currently printing the parts for testing.
See the github repository for the latest files.
Also, leave me a message if you would like to have a little tutorial on how to draw the tooth profile in Fusion360 as it way more accessible to the majority than Solidworks is.
-
Project Repository on GitHub
06/03/2018 at 19:17 • 0 commentsIf anyone is interested in the files, one can download it in this github repository.
One can find following files:
- Design files (Solidworks 2017)
- Printable files (STL)
- Transfer files (STEP)
If anyone is interested in contributing one can send me a direct message or leave a comment.
ToDo:
- update wave generator
- change teeth design (steeper angles for less backlash)
- patent and licence research (igus is the likeliest competitor)
- if possible: replaceable circular spline
- destructive Test
- what is the highest possible torque to be moved by the stepper motor
- what ist the highest possible torque to be applied to the gear before braking
- get a concept to add a rotary encoder
-
The Gear in Action
04/25/2018 at 22:33 • 0 commentsHere are a few pictures of how I use this robotic component:
Here you see a two axis gimbal to move my camera. With a angular resolution of 0.03 degree, it should be possible to use this setup to compensate for earth rotation while doing astronomy photography.
The two strain wave gears are connected by a big, bone like part, that was topology optimized in fusion 360 and glued together after printing it in four parts. The parts have holes for pins to align them properly.![]()
![]()
-
Improvements to the mentioned problems
04/25/2018 at 22:09 • 1 commentI mentionet some problems in the project descriptions:
- The backlash of the part is still there - the culprit my be the triangle shape of the teeth. A more trapezoidal shape with steeper angles might reduce it further.
- The stiff rotor has to be printed to the correct size - a design with the possibility to correct its length could prevent reprints and shorten the time used to fit it all perfect.
- A stiff rotor also has problems with deviations from the right diameter - some kind of flex could prevent the motor from stalling if there is a little bump in its way.
- If you want to change the gearing ratio you have to reprint the biggest parts of the design - the cup and the housing. Some sort of exchangeability in the housing would make iterating much faster and cheaper.
Teeth design:
The german company Harmonic Drive, a leader in design and manufacturing of strain wave gears, promote their "S-Tooth" design as an unique solution. I suspect that there is an active patent to this. A Sinusoidal shape might be infringing that patent, I have to check that on www.register.dpma.de (website with search function of the german department for trademarks and patents)
As mentioned, a trapezoidal shape should be sufficient for minimizing backlash.
A inside edge angle of, or less than, 20 degree are the next designs I am going to try.Flexible Rotor:
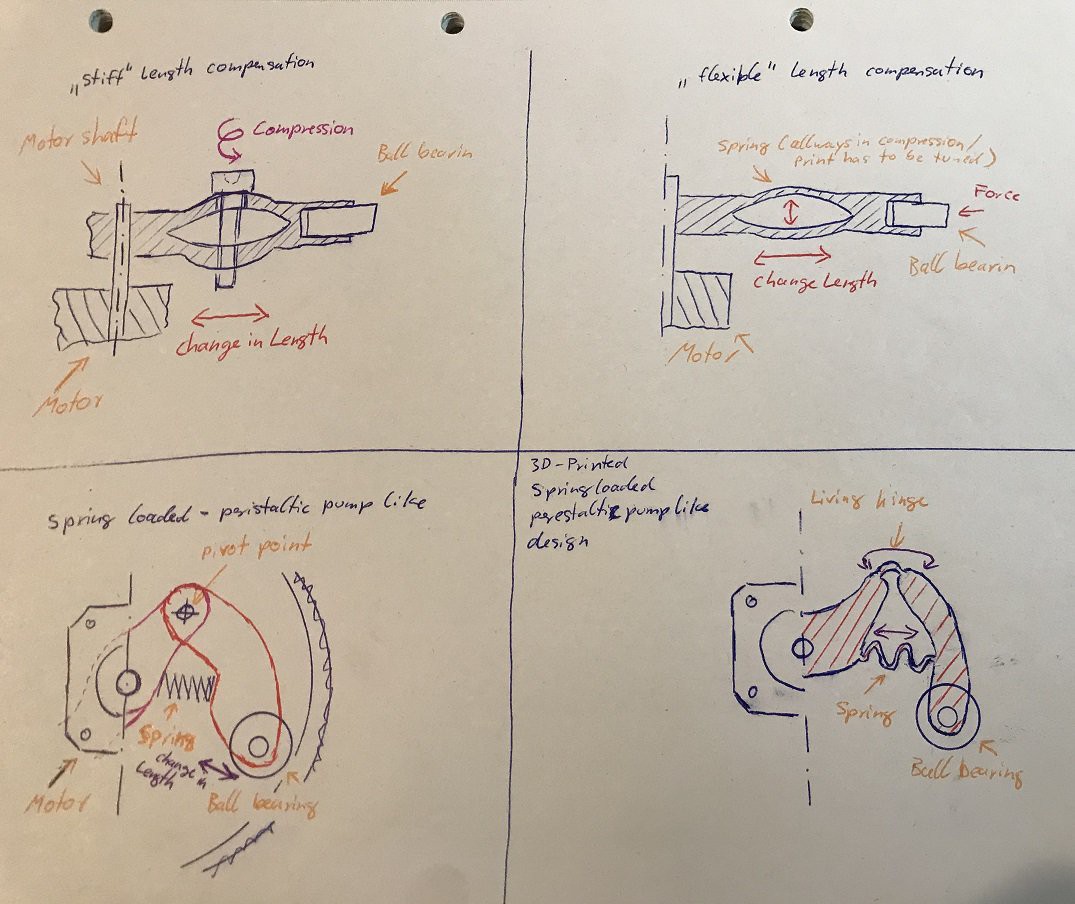
I got some ideas for this point, as it can be seen in the following Picture:
![]()
The stiff length compensation solves the problem with reprinting the rotor parts for a perfect fit, but cant compensate for artifacts that cause a slight change in diameter (STL faceting)
That's where the flexible length compensation can shine. But a slight difference in spring rate from top to bottom part of the spring will cause the ball bearing not to be parallel to the flex spline what is going to cause unnecessary wear and tear.
Inspired by spring loaded peristaltic pumps, the third concept is able to compensate length for a good fit and differences in diameter by facets, but is also stiff in the plane for the ball bearing to be parallel to the flex spline. The Drawback is that it needs more standard parts that have to be bought (spring and bolt for the pivot)Ultimately concept four fulfills all requirements and doesn't need more standard parts than the current design. The right dimensions for the hinge and the spring have to be found though.
Exchangeable gearing ratio
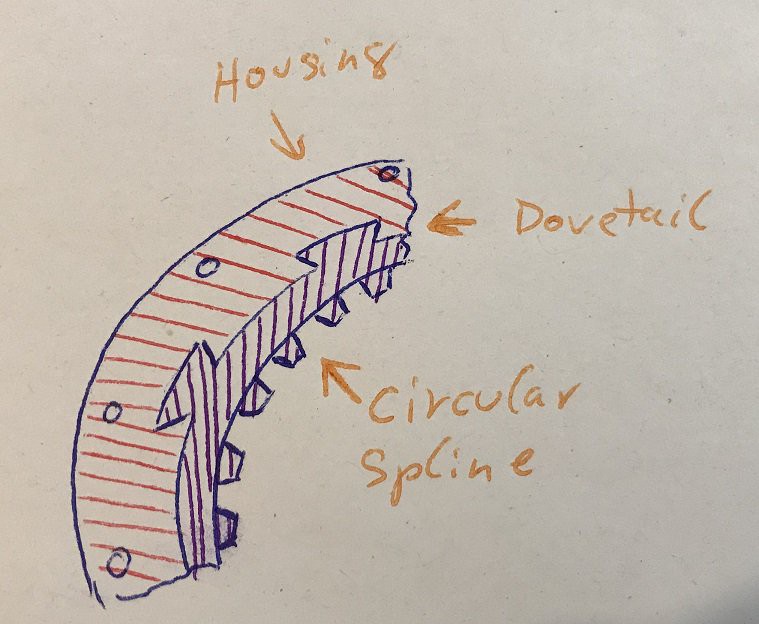
The goal is to minimize the wasted amount of Filament and thereby accelerate design iterations if another gearing ratio is needed. As the flex spline has to be, as the name already implies, flexible, I don't see a way to only exchange the teethed area of the part. But the biggest part, the circular Spline and Housing, has potential to allow a separation of the to functions into two parts.
As a big thread could unthread itself, depending on the direction of rotation.
A dovetail like structure, circular patterned around the center of the gearing, would allow a change without the downside as mentioned above.
![]()
-
flashback to my first iteration
04/10/2018 at 19:09 • 0 commentsThis video shows my first iteration of a 3D printed strain wave gear:
It had some disadvantages:
The sliding surfaces were milled out of aluminium that worked fine, but my goal is to have a design that was only printed and assembled without additional labor.
The ball bearing on the wave generator was to small and caused to much wear and tear on the flex spline
The shaft coupling bent the wave generator, resulting in unwanted backlash due to too much play.
3D Printed Strain Wave Gear
printed - using only PETg, no flex filament needed integrated NEMA17 stepper motor only three small parts for tolerance compensation