 Rafael Serrano
Rafael Serrano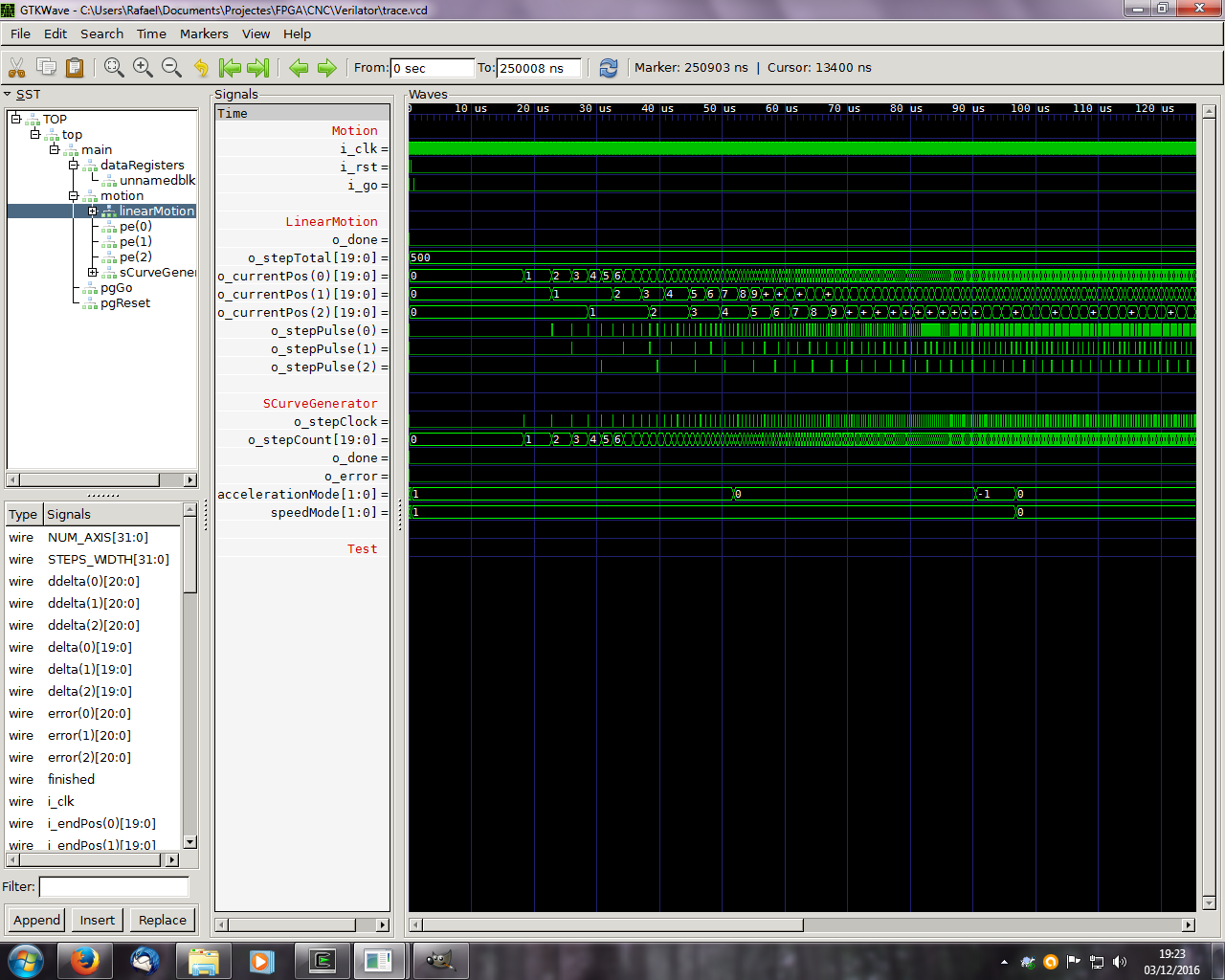
At the moment I have finished the prototype 3-axis motion controller with a DE0-Nano board. The simulation was performed with Verilator, and the synthesis and programming with Quartus-II v13.1.
The model is written in system verilog. It includes several modules, the most important of which SCurveGenerator, LinearMotion and ALU, with a Look-Ahead carry.
The system generates the STP and DIR signals for three step motor controllers. As parameters requires JERK, and the definition of S ramp. The process starts when receiving the GO signal.
I forgot to mention that the number of axes can be configured using the NUM_AXIS parameter from 2 to 16
Soon more and better
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.