 Rafael Serrano
Rafael SerranoGoal:
Design and construction of the machine, the control software and utility applications. There are some changes from the beginning.
Why:
- For use in my work
- For hobby
- And definitely because I can.
Modules/Parts:
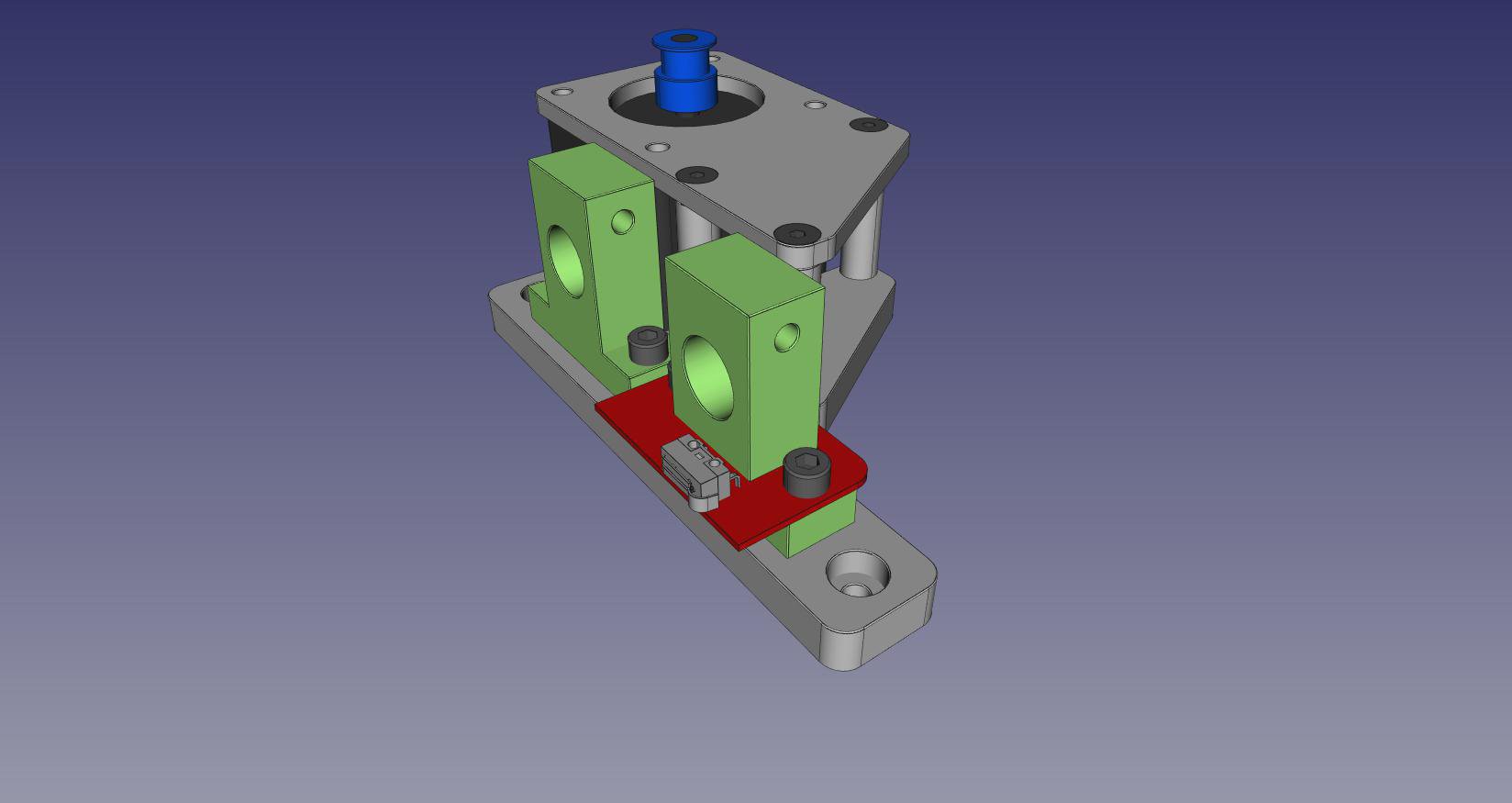
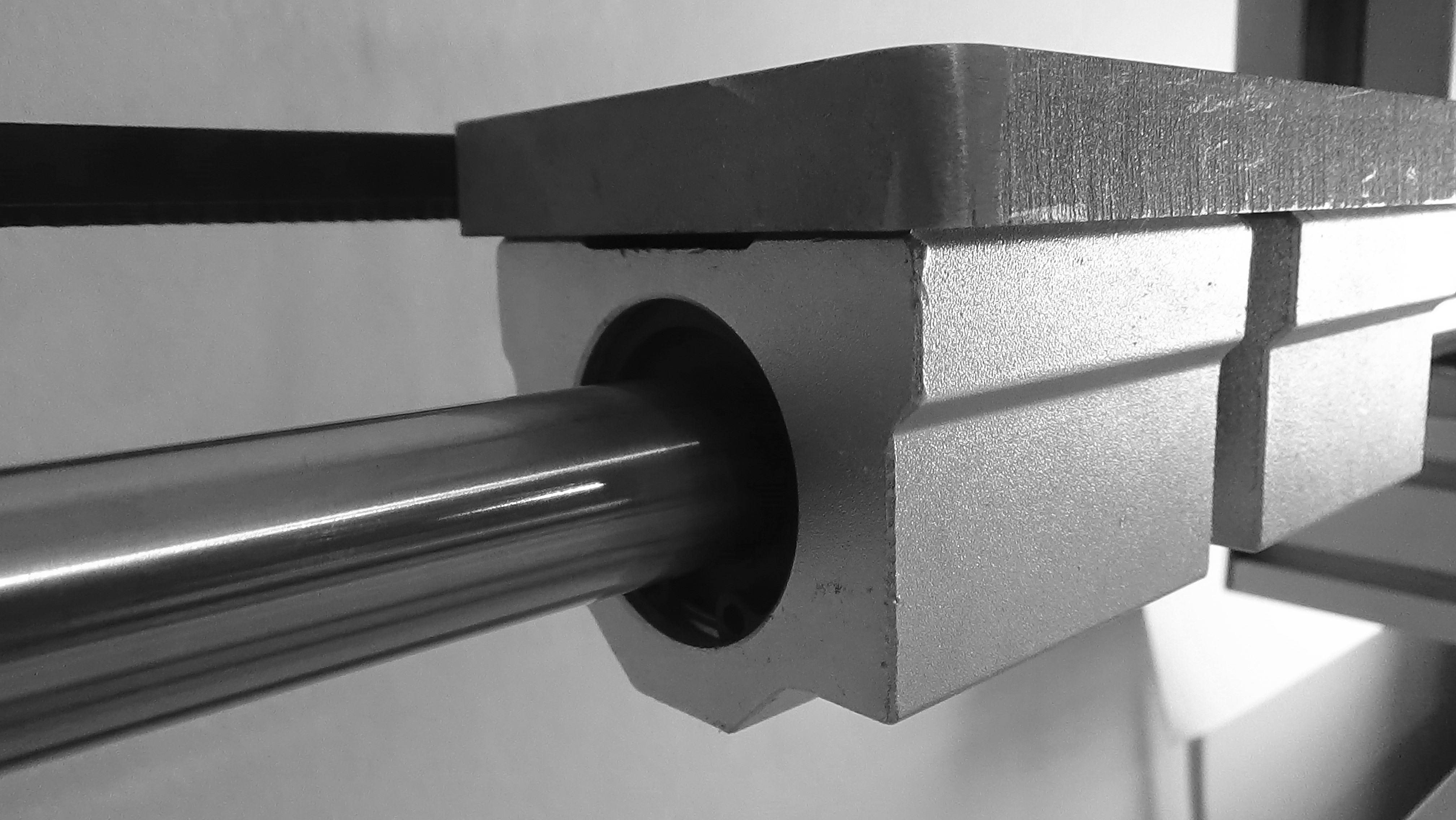
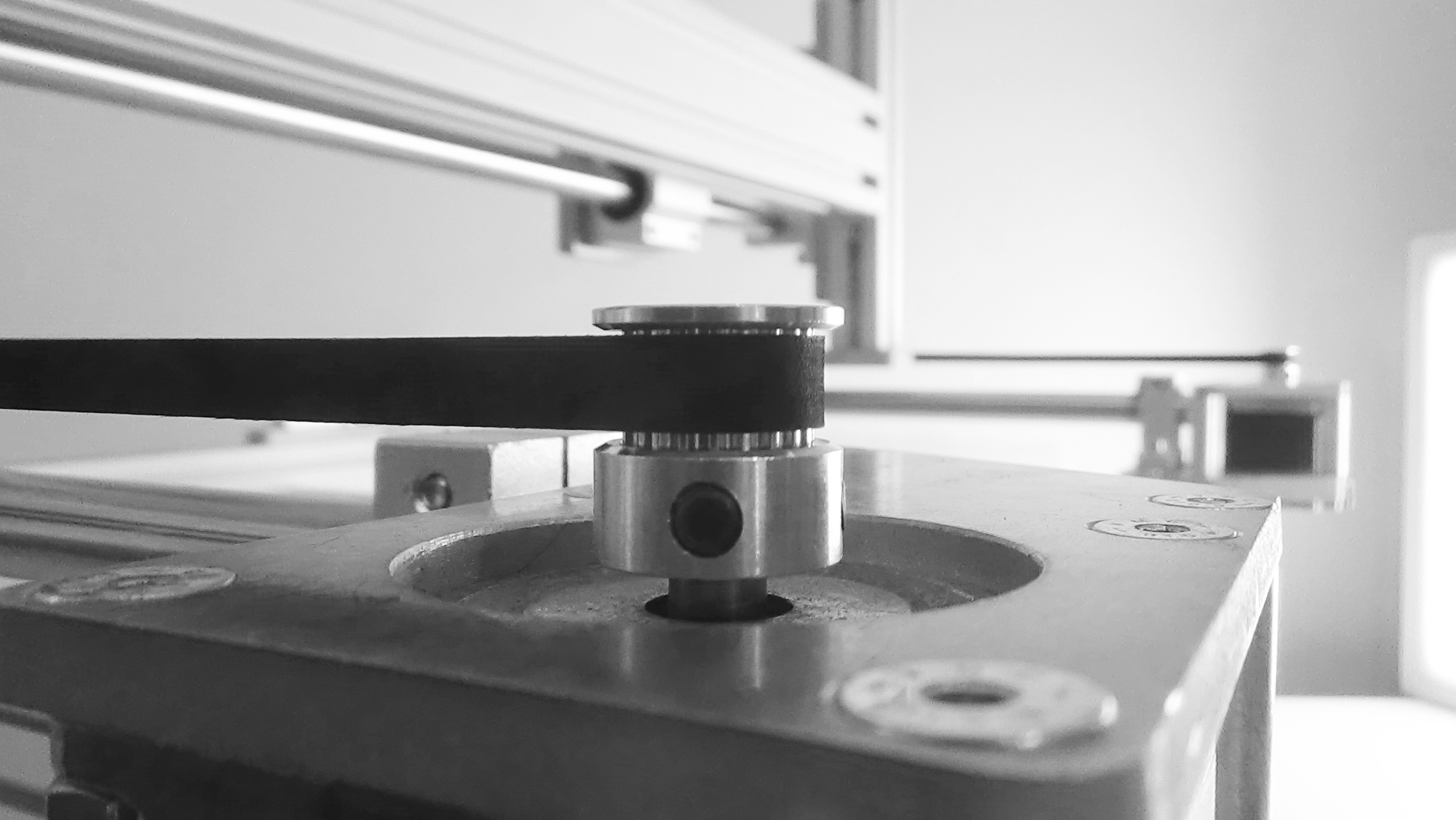
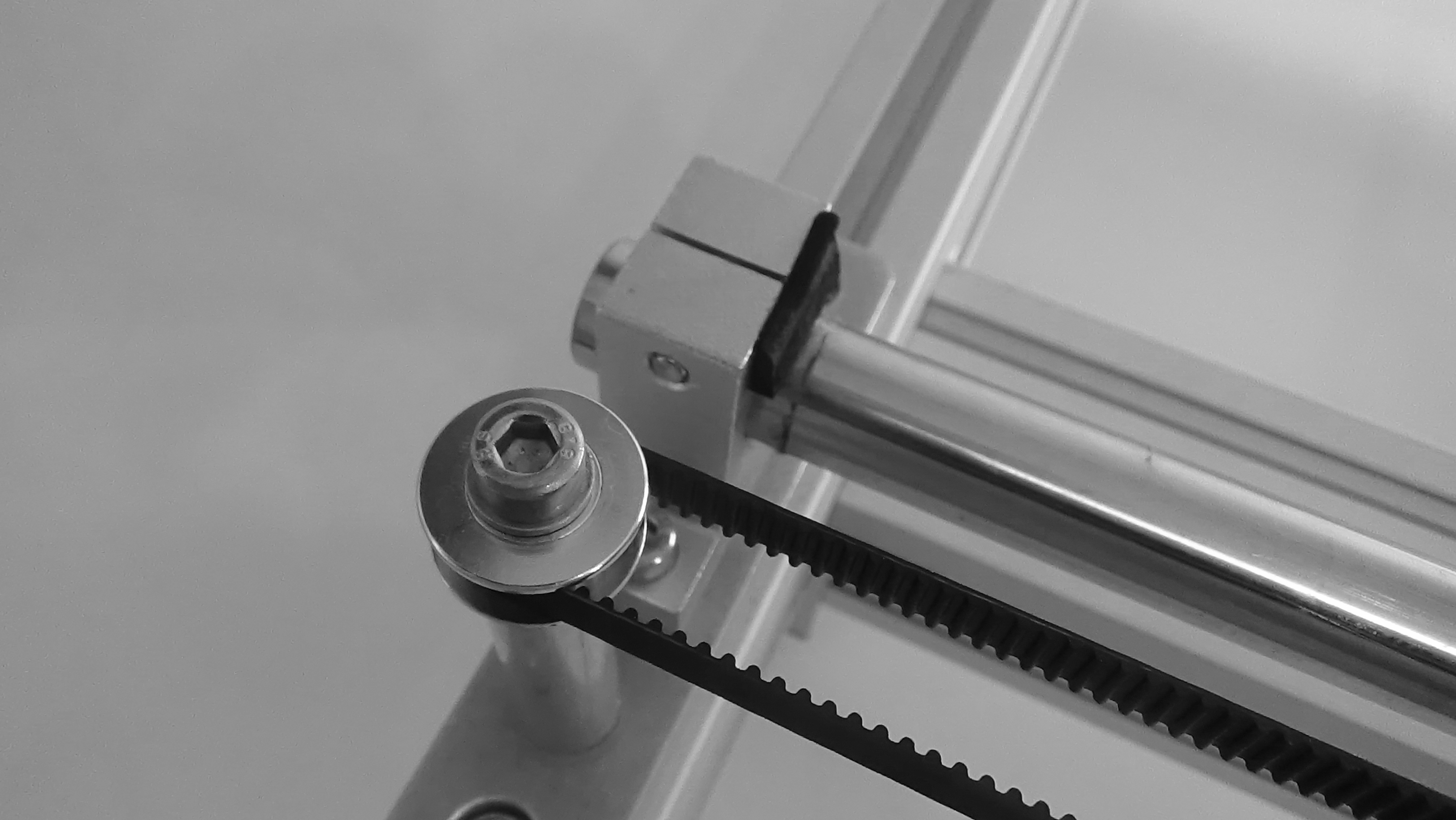
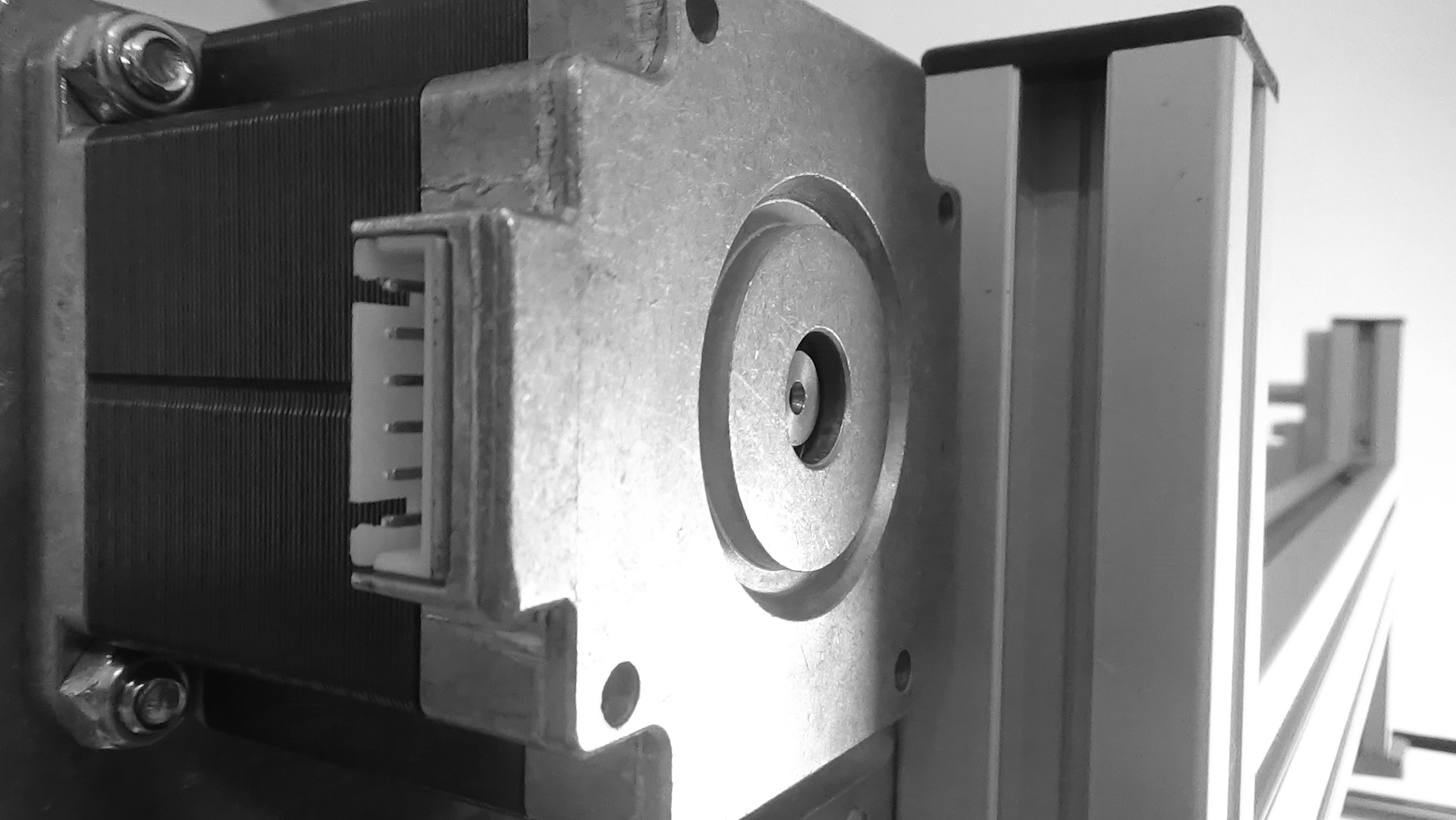
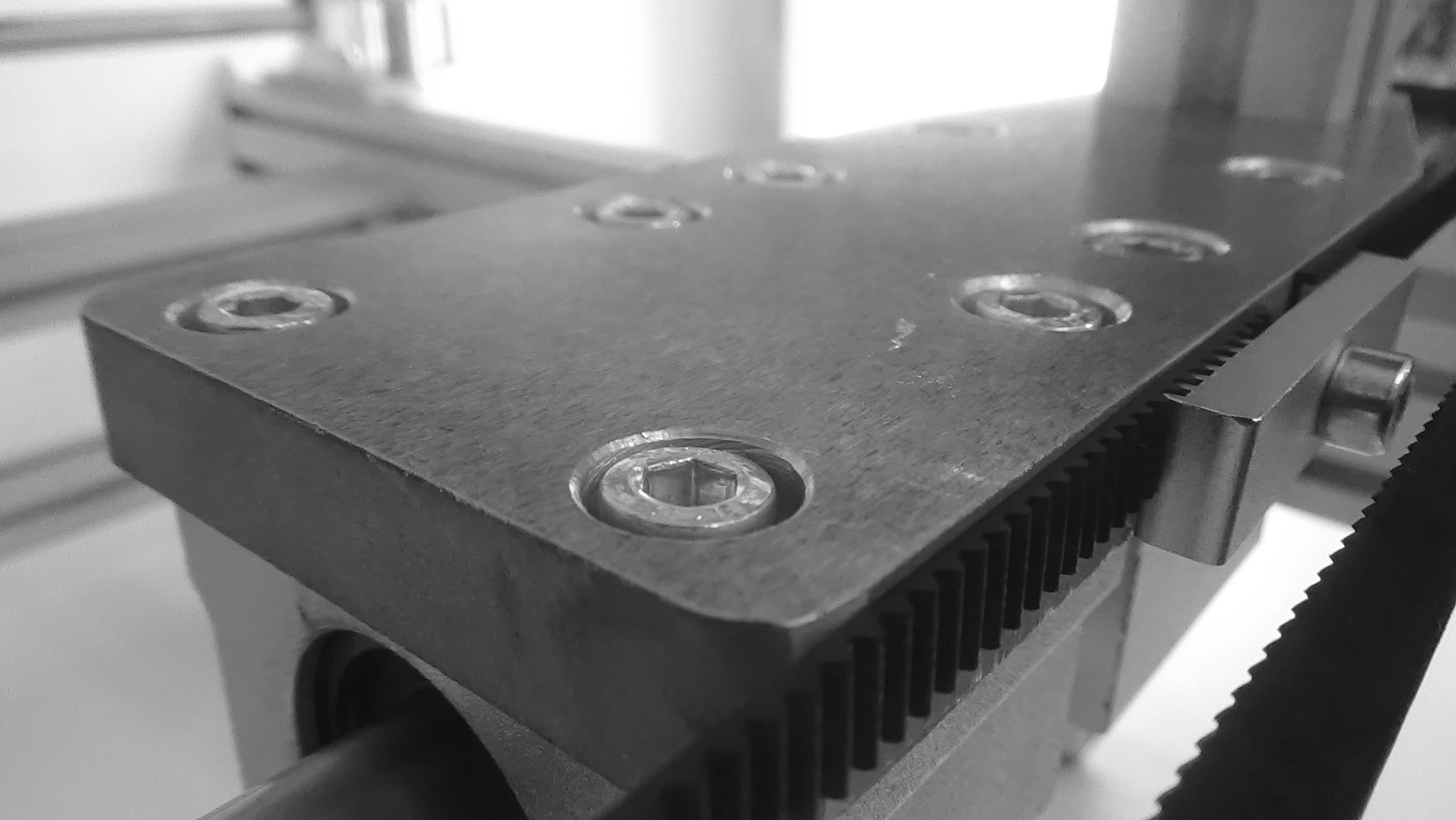
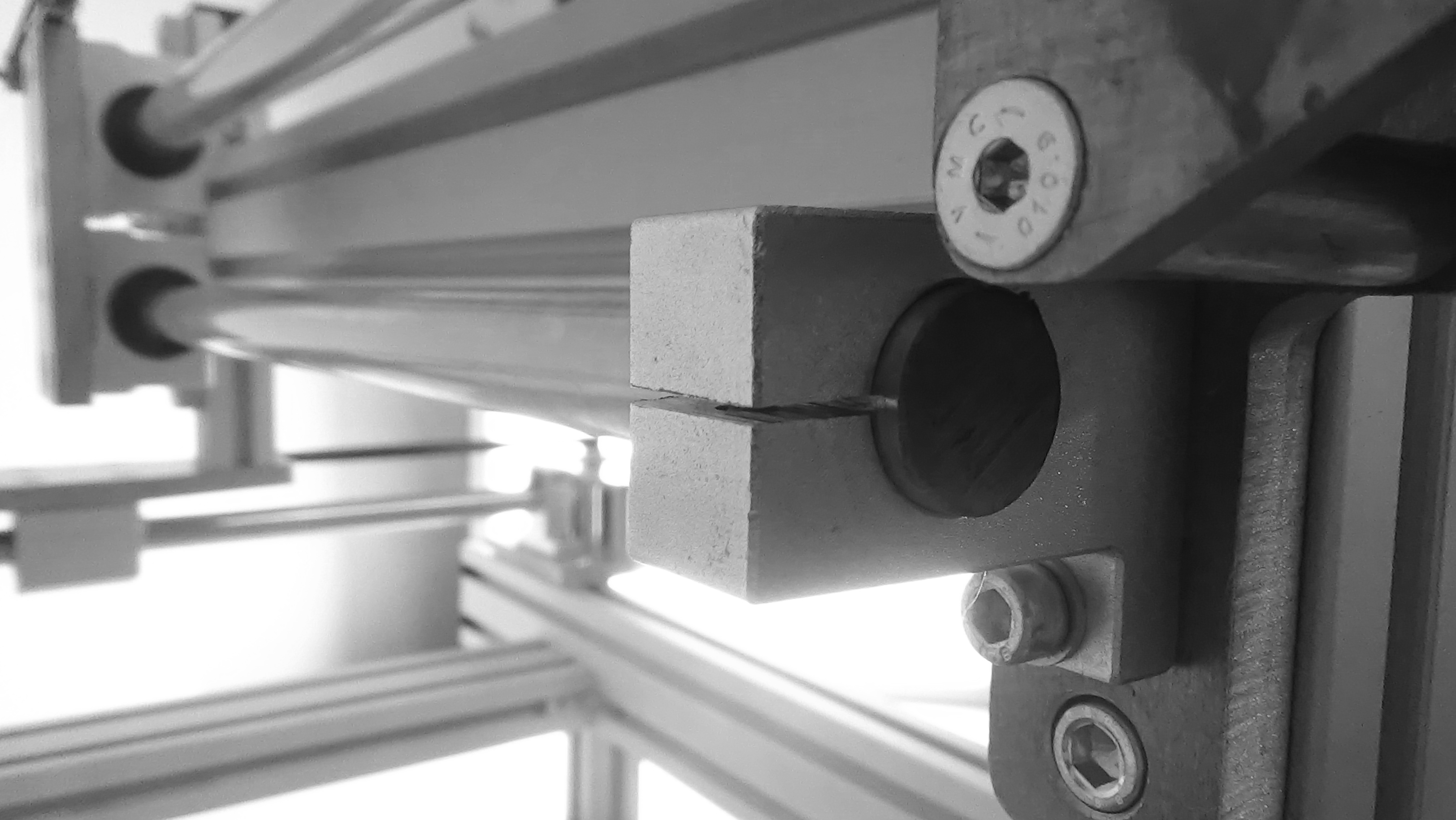
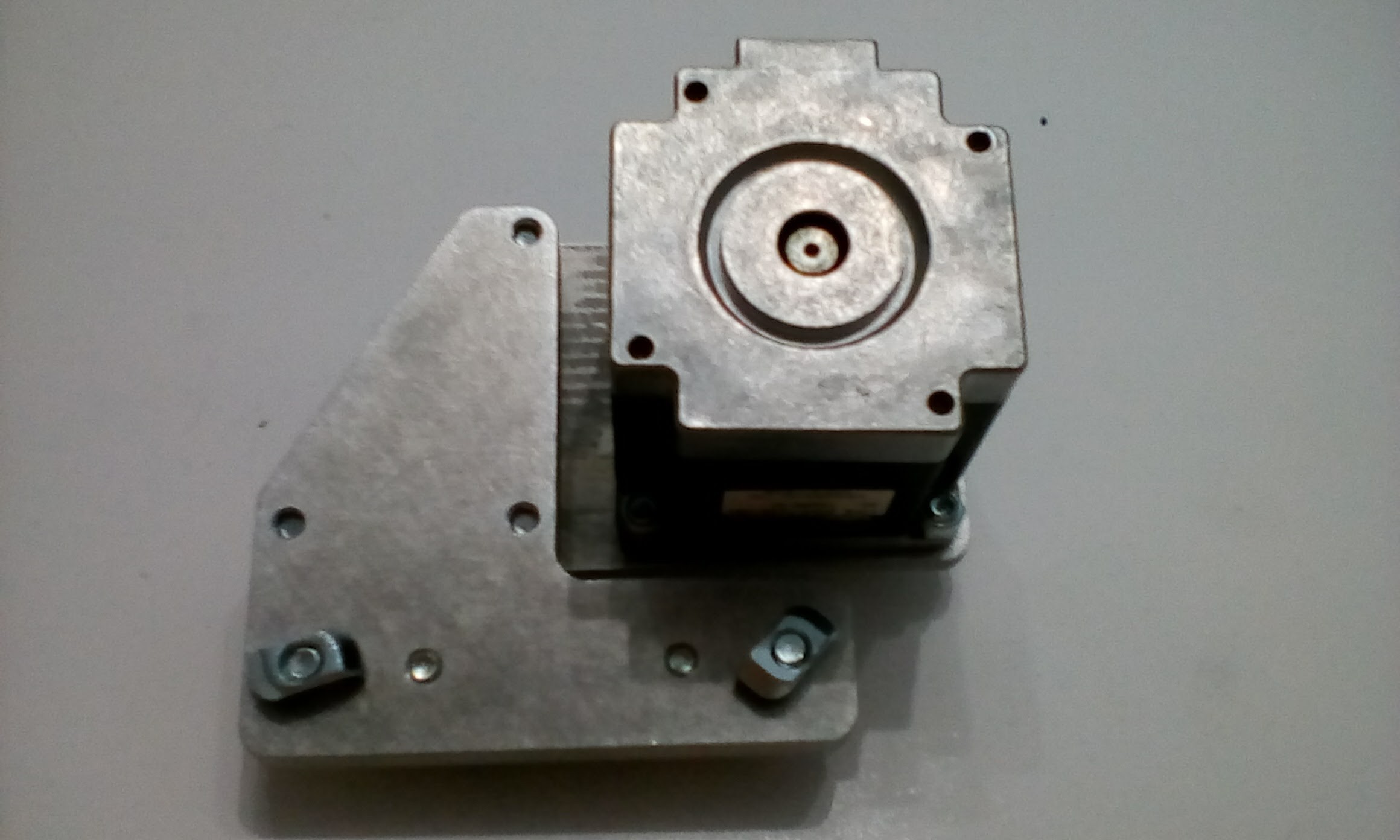
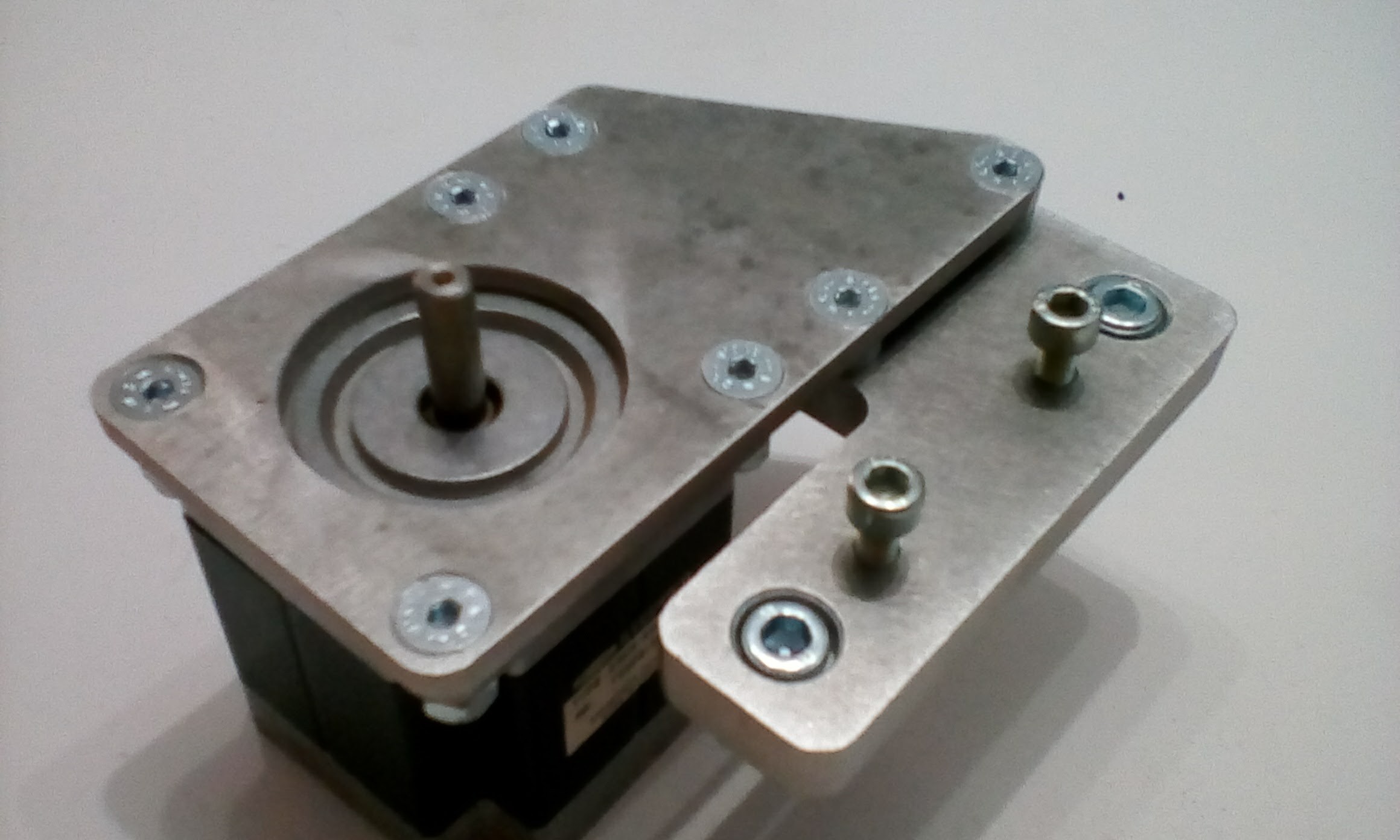
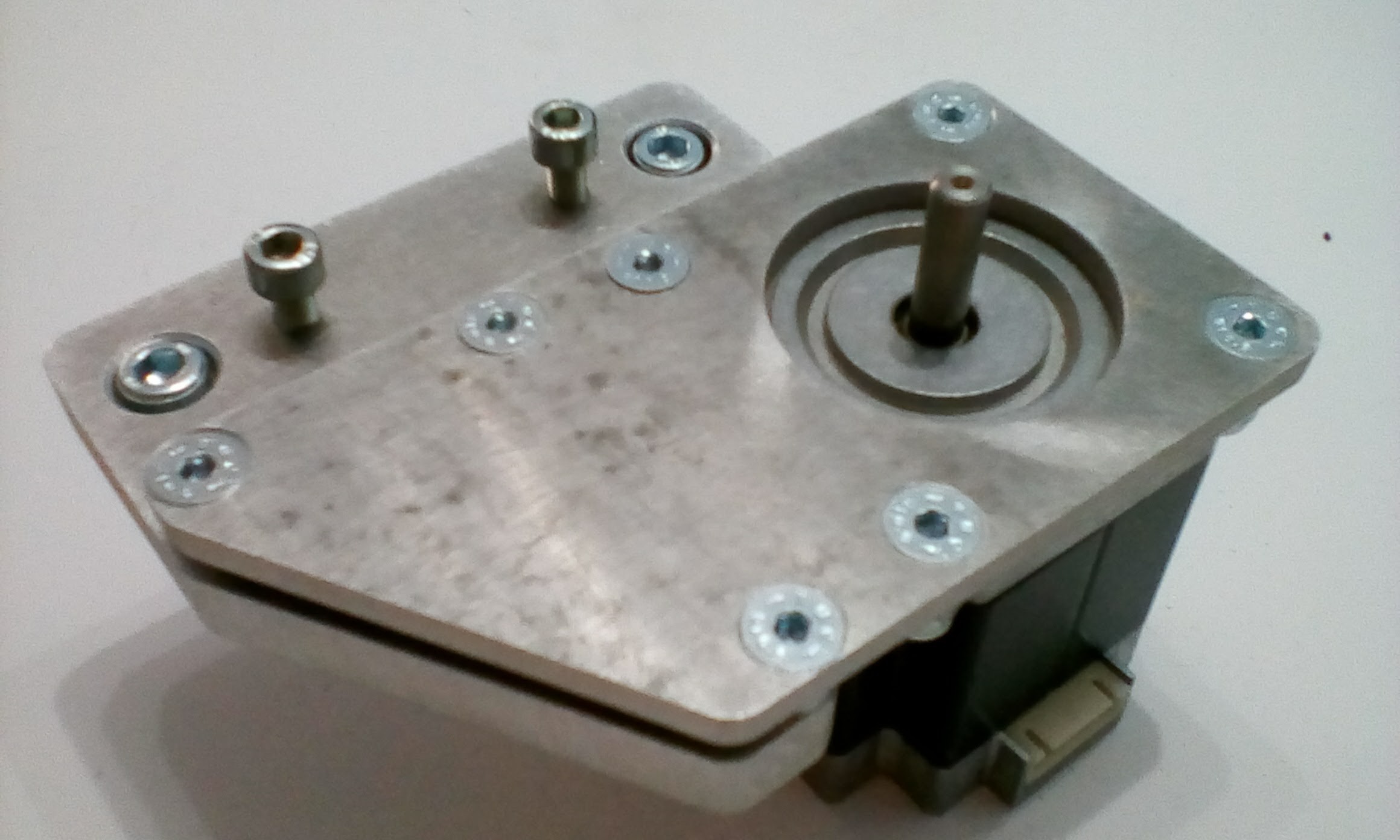
Mechanical Hardware:
- Frame
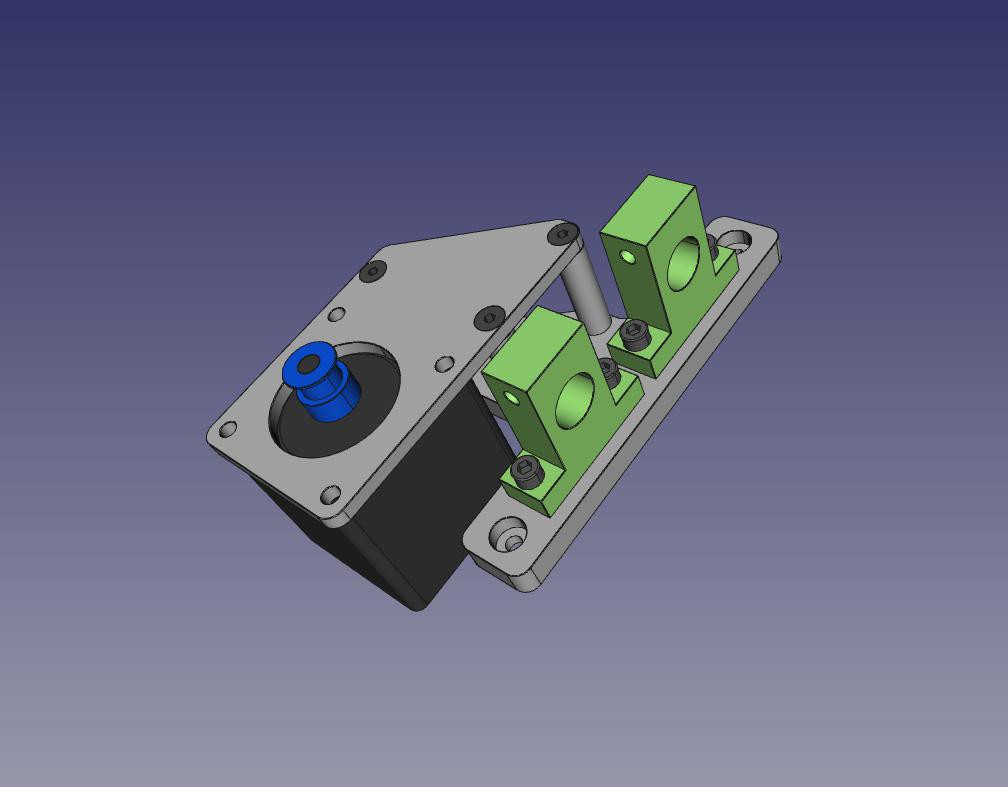
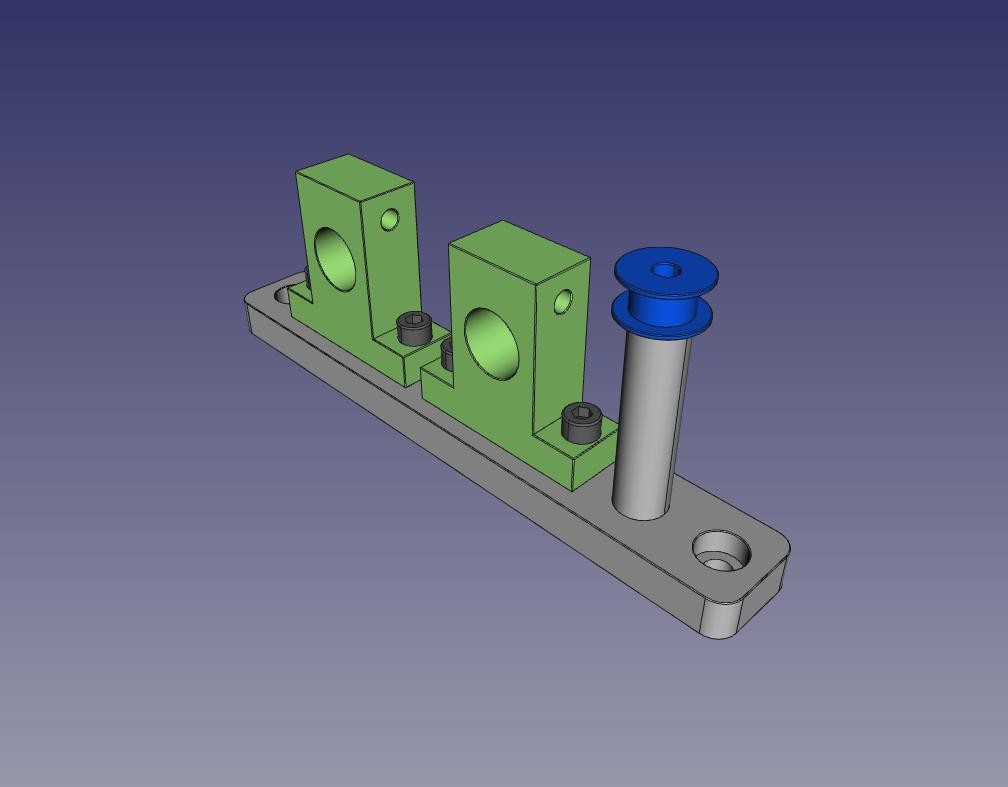
- Y-Axis
- X-Axis
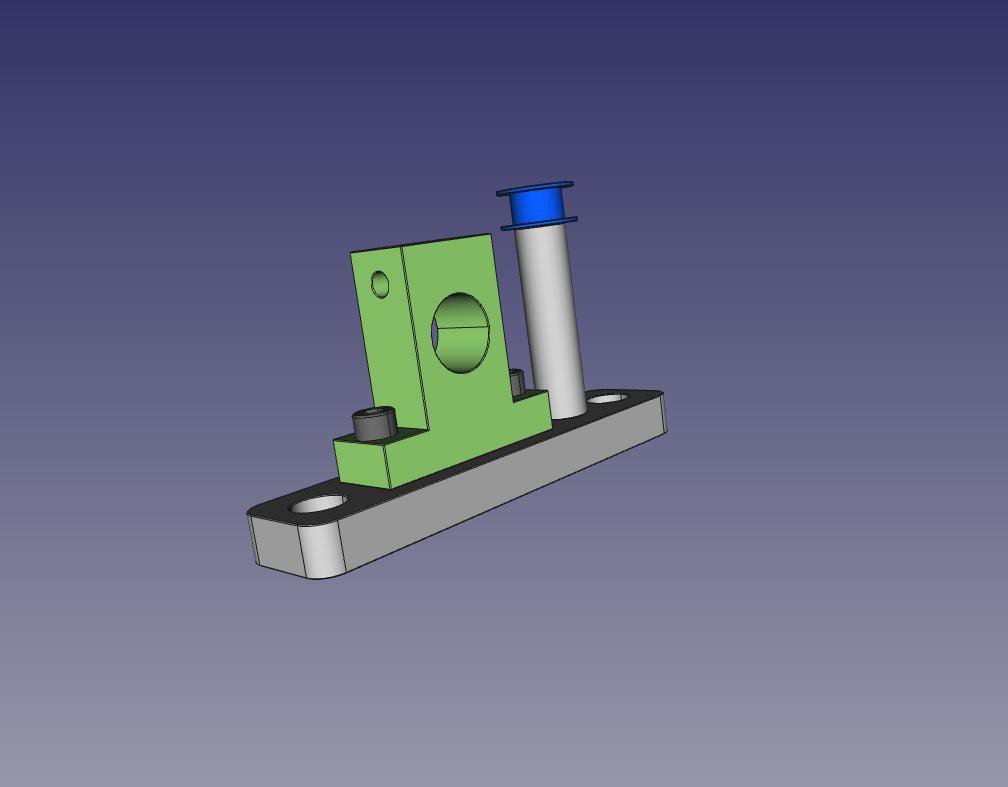
- Z-Axis/Picker
- Feeders
Electronic hardware:
- 4 axis motion control board by software STM32F (First option)
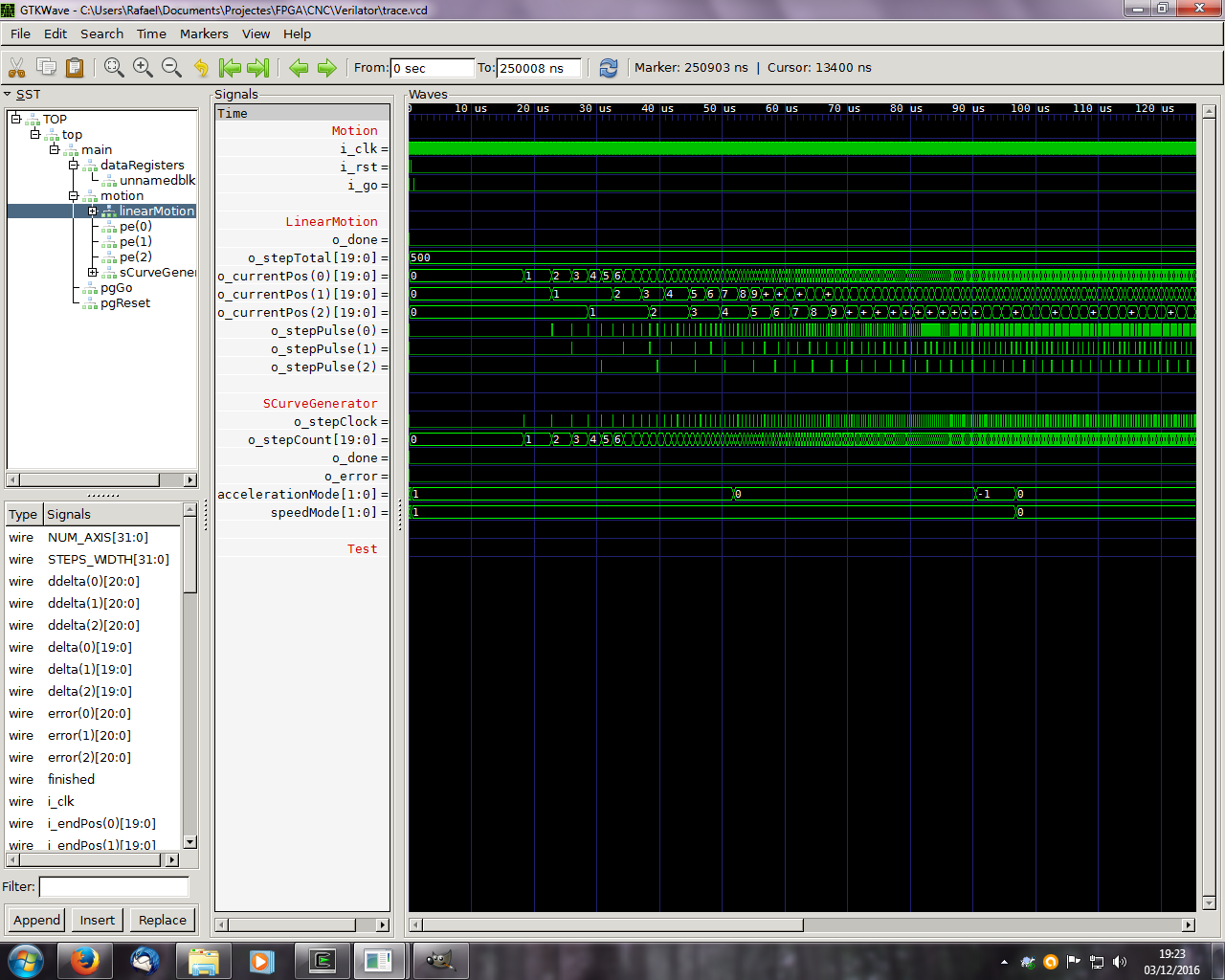
- 4 axis motion control board by STM32F and FPGA. Written in C++ and System Verilog. (Advanced option)
Embedded software/softcore:
- Motion controller written in C++ and SystemVerilog
- EOS operating system. (EOS on my GitHub channel)
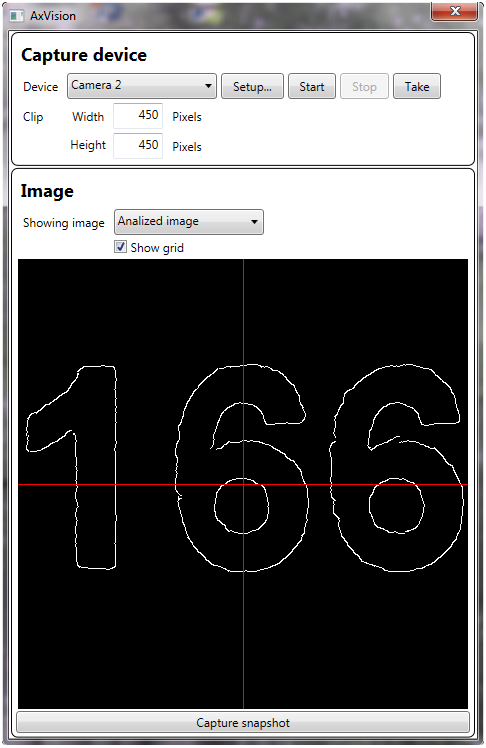
Desktop software
- Application control for pick and place operations.
- Utility tools for data extraction from schematics and pcb (EDATools on my GitHub channel).
Tools used:
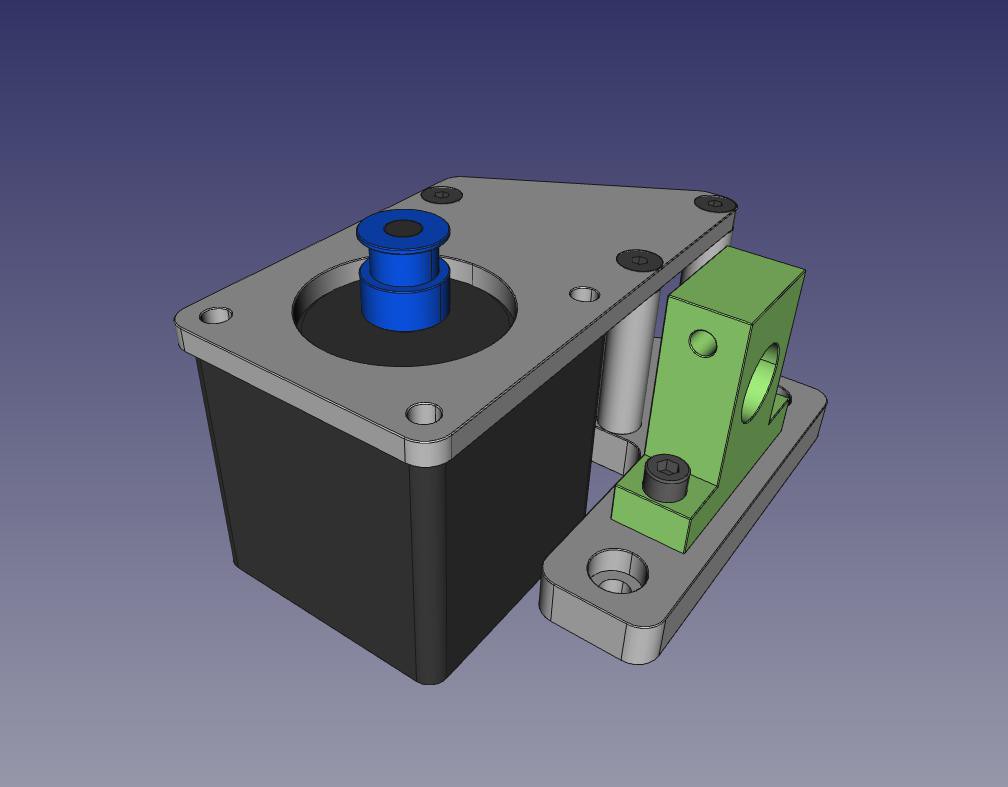
Mechanical design:
- FreeCAD
- LibreCAD
Electronic design:
- Eagle (Schematic & PCB)
- Kicad (Schematic & PCB)
- Quartus (FPGA sintesis)
- Verilator (FPGA simulation and verification)
Windows software design:
- Visual Studio 2019
- Avalonia GUI library
Embedded software design:
- STM32CubeIDE (Free STM32 compiler-ide, eclipse based)
Hardware tools/kits used:
Hardware developemen boards/kits:
- Terasic DE0 Nano
- STM32F746G-DISCO
Information sources
- VBesment blog This is the main source of information about motor control and trajectory interpolation. I writed a new version of motion control based in this work.
- Brian Dorey blog







 Isaac Chasteau
Isaac Chasteau

 Greg Duckworth
Greg Duckworth
 Rui Caldas
Rui Caldas
Hi,
Thanks for sharing I really like your project it looks simple and efficient, would like to know if you could help me design similar project but head controlled by joystick (X-Y axis) and nozzle controlled by stick as well (Z axis).