Project Goals
- A robot that can walk in a straight line and not fall down.
- make accurate turns.
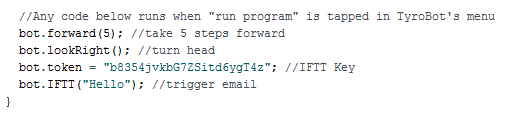
- Anyone can program it, from kids to Arduino users to pro C developers.
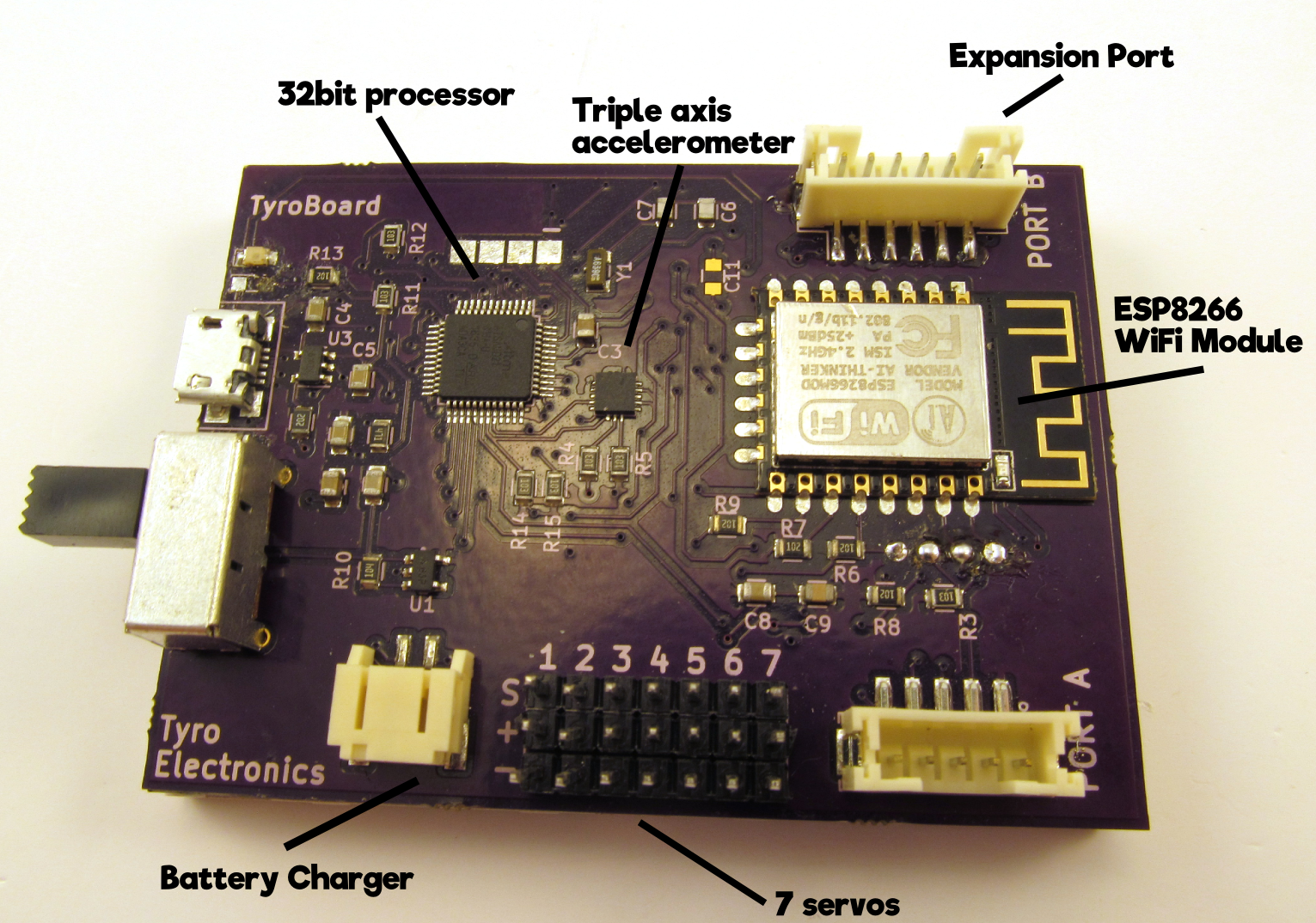
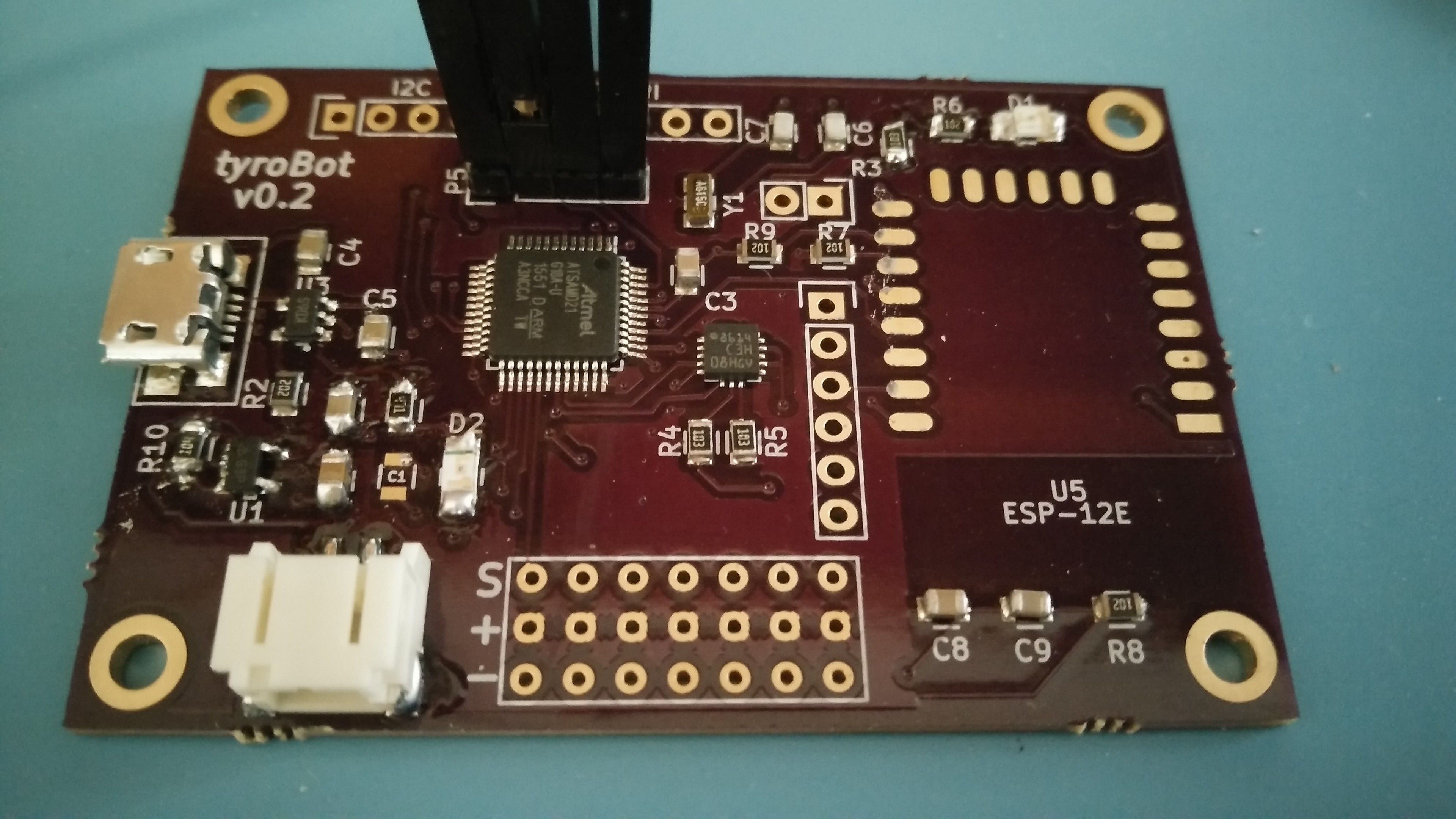
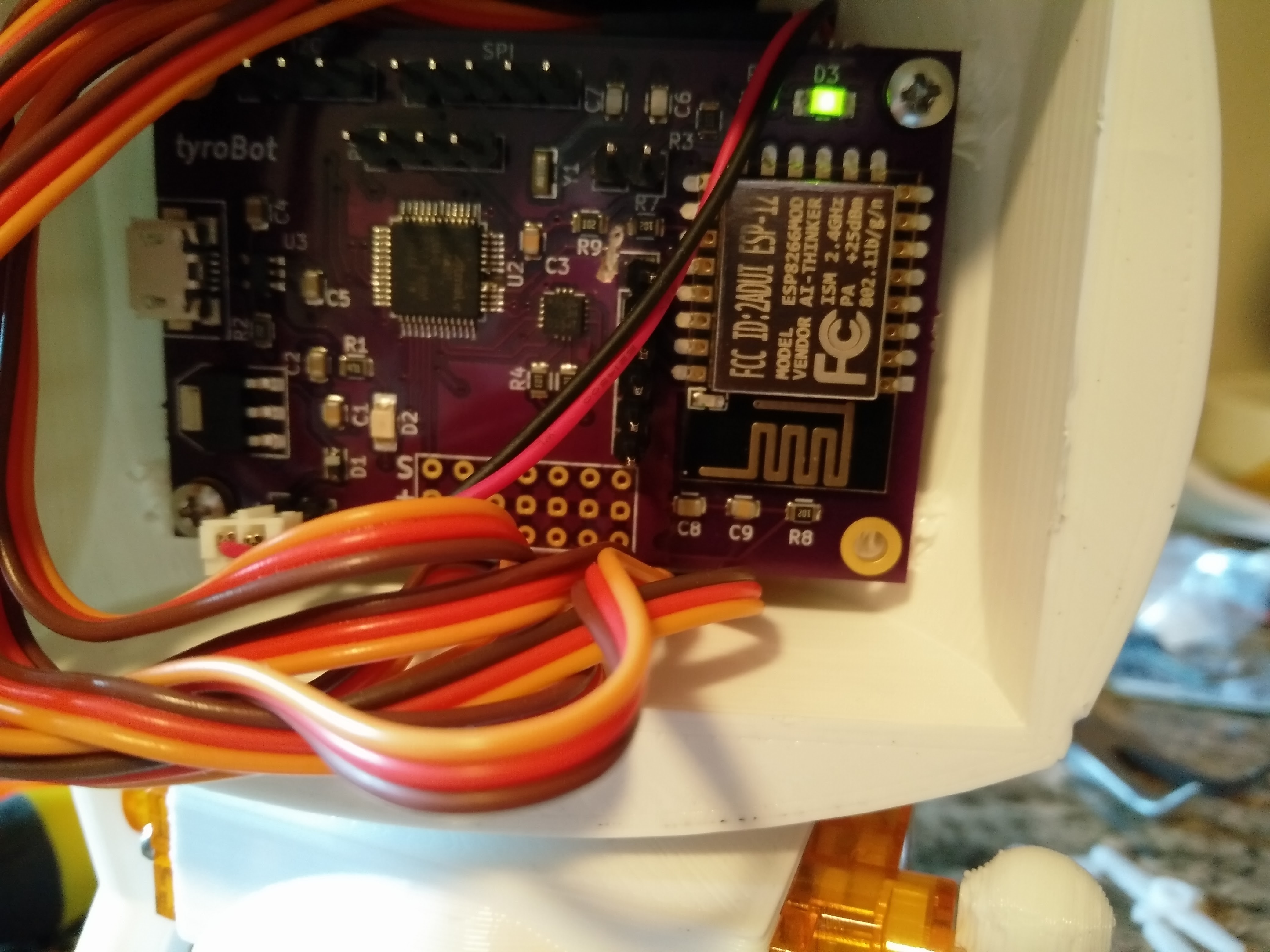
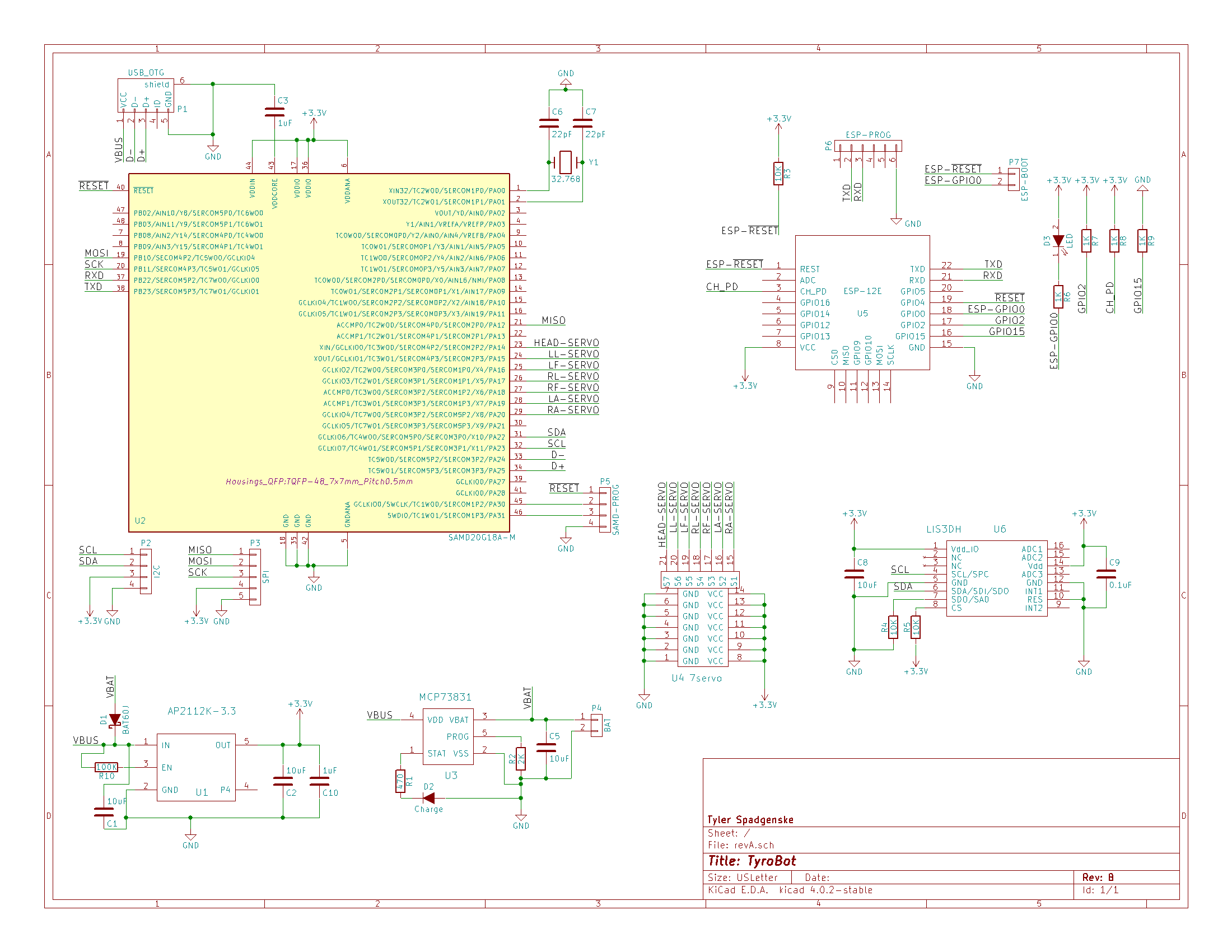
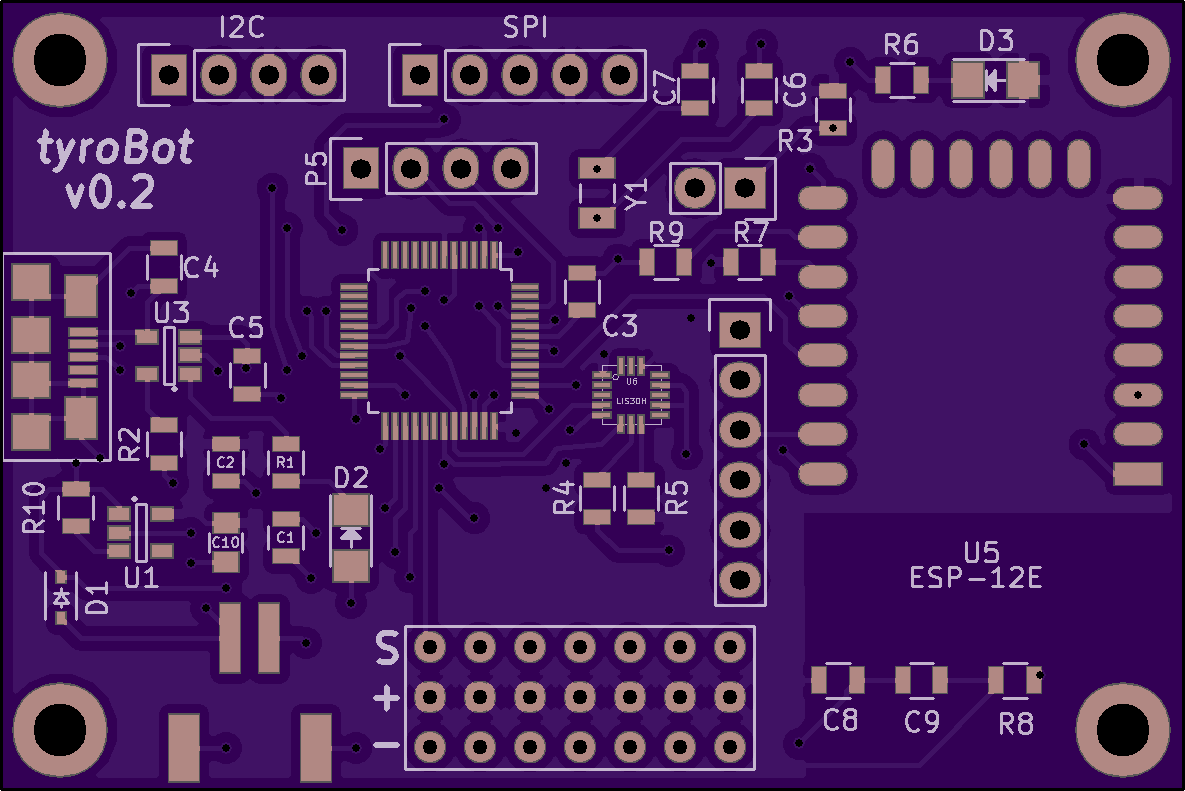
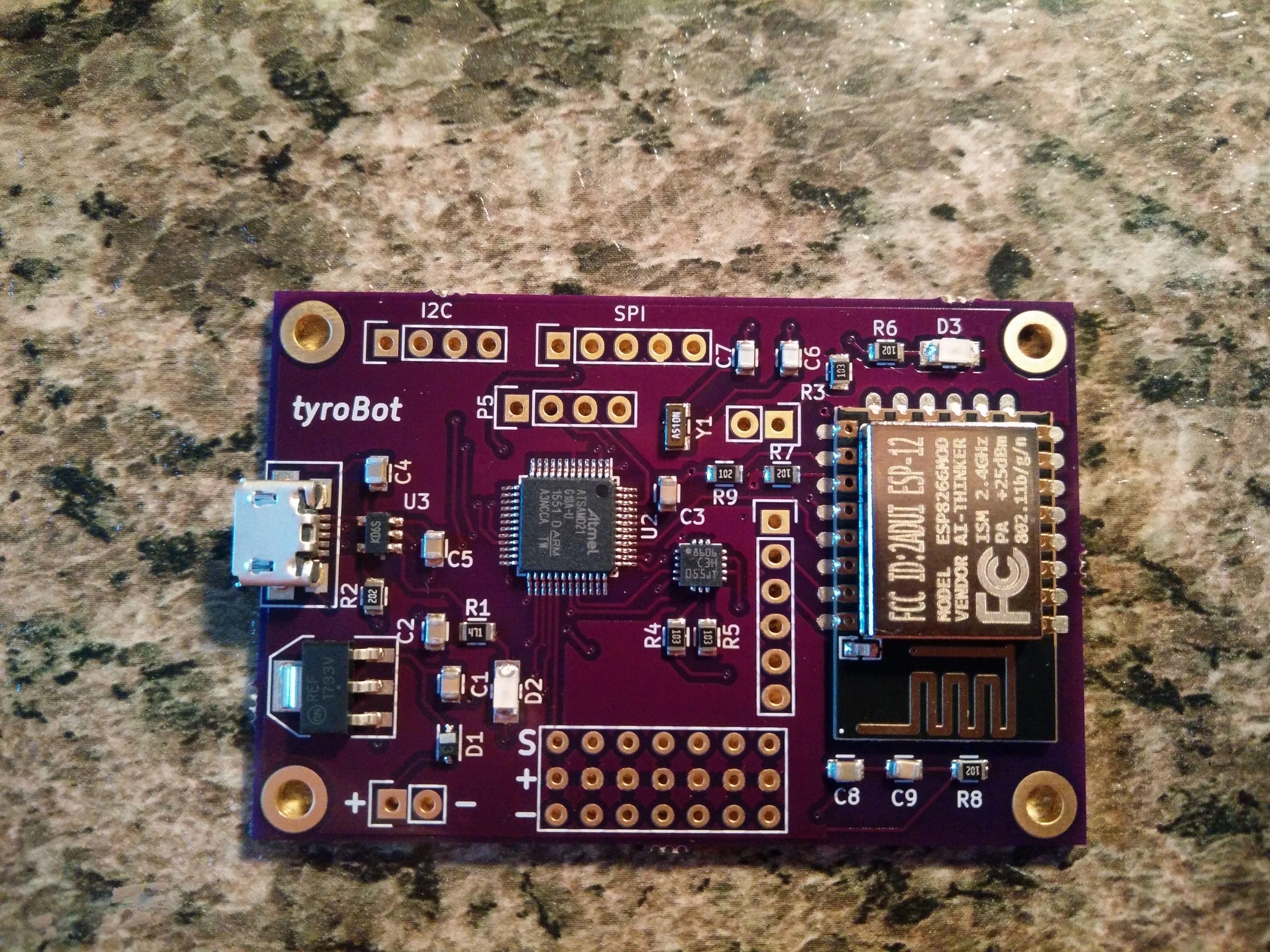
- Uses a 32bit processor, the ATSAMD21G18A.
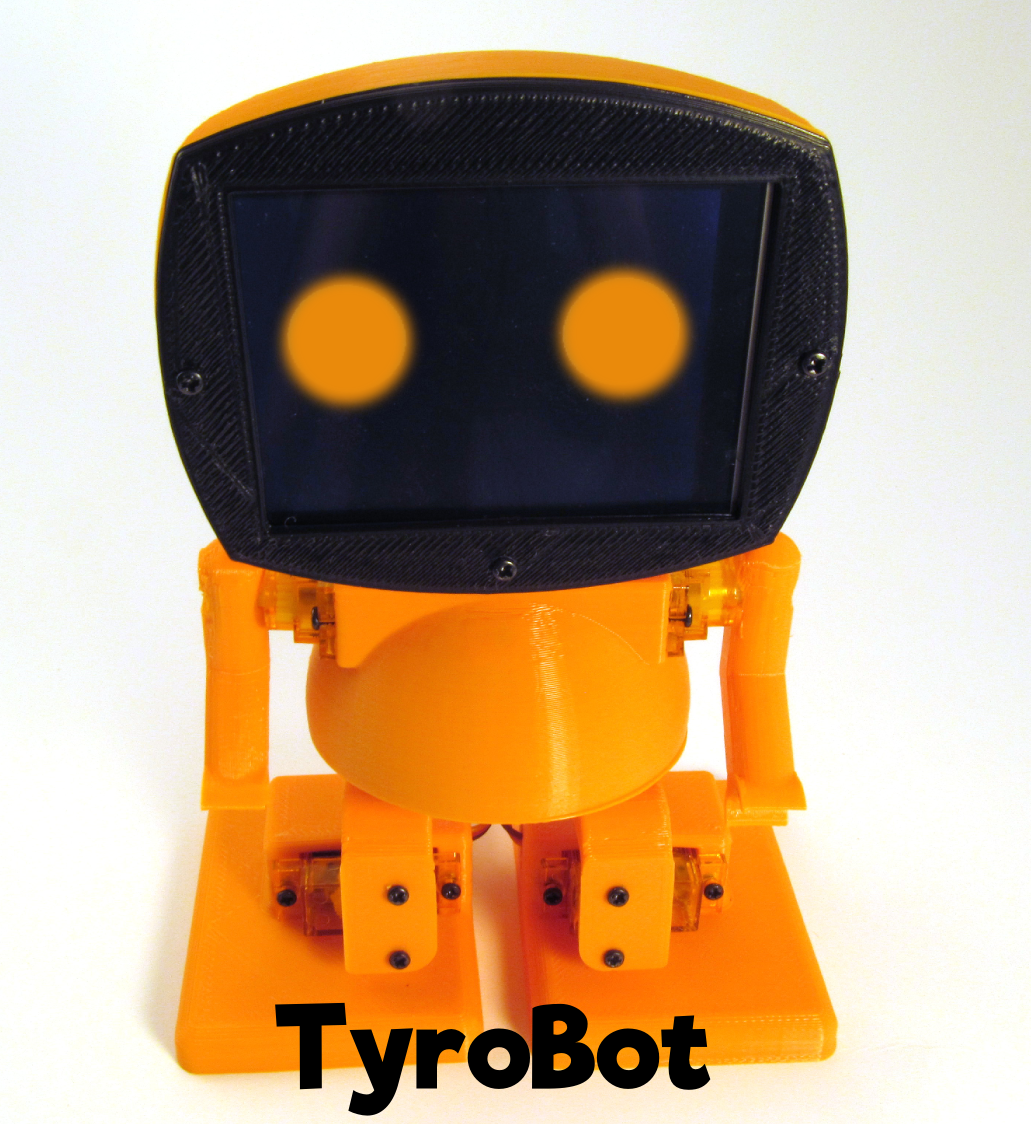
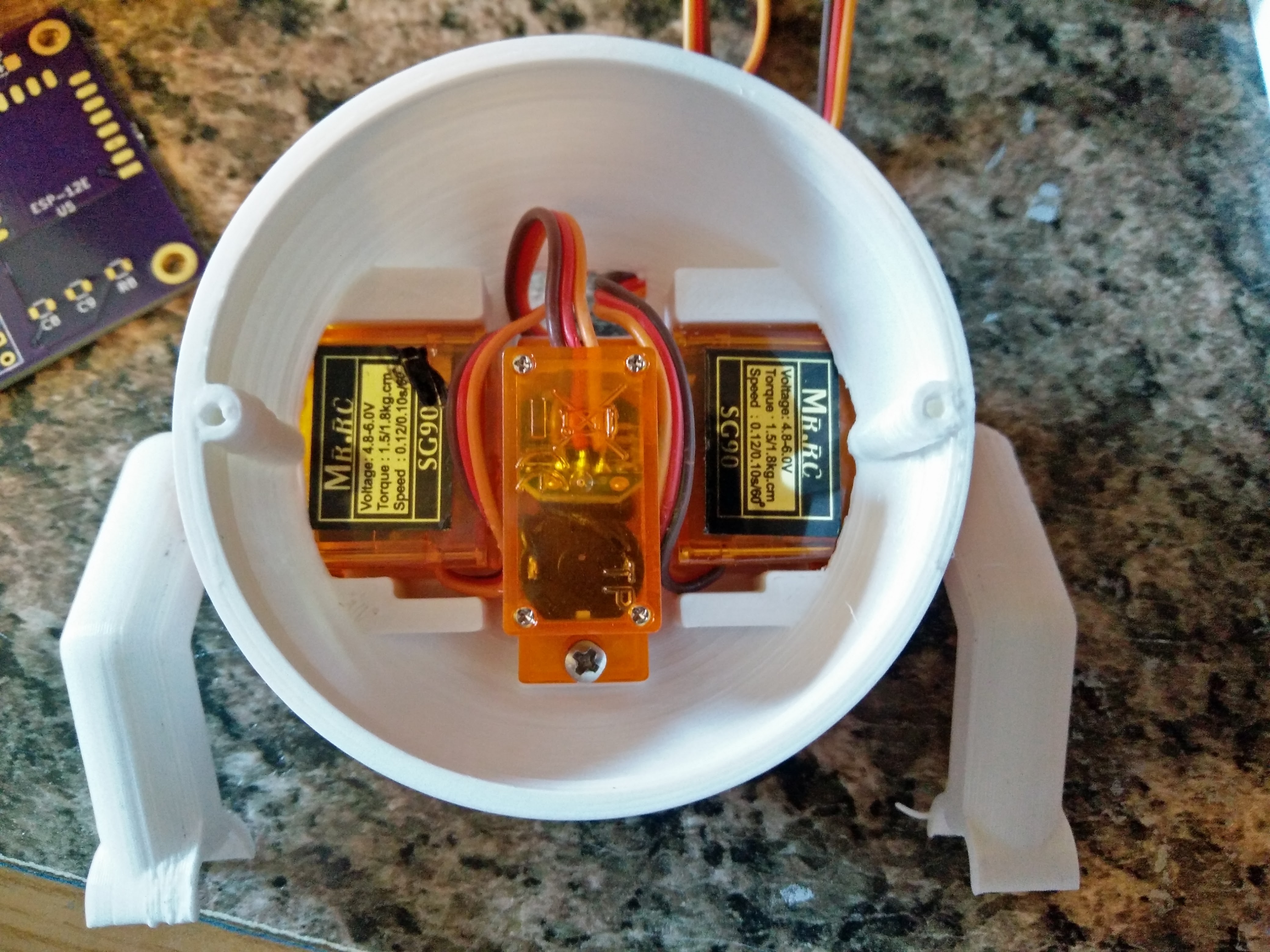
- Entire robot can be 3D printed on a 100mm^3 bed.
- Powered by a single cell lithium ion battery that is charged over micro USB.
- Controlled wirelessly via WiFi on the ESP8266, hopefully peer to peer compatible so no wireless network is required.
- Store multiple programs on board so you don't need to reflash every time you want the robot to do something different.
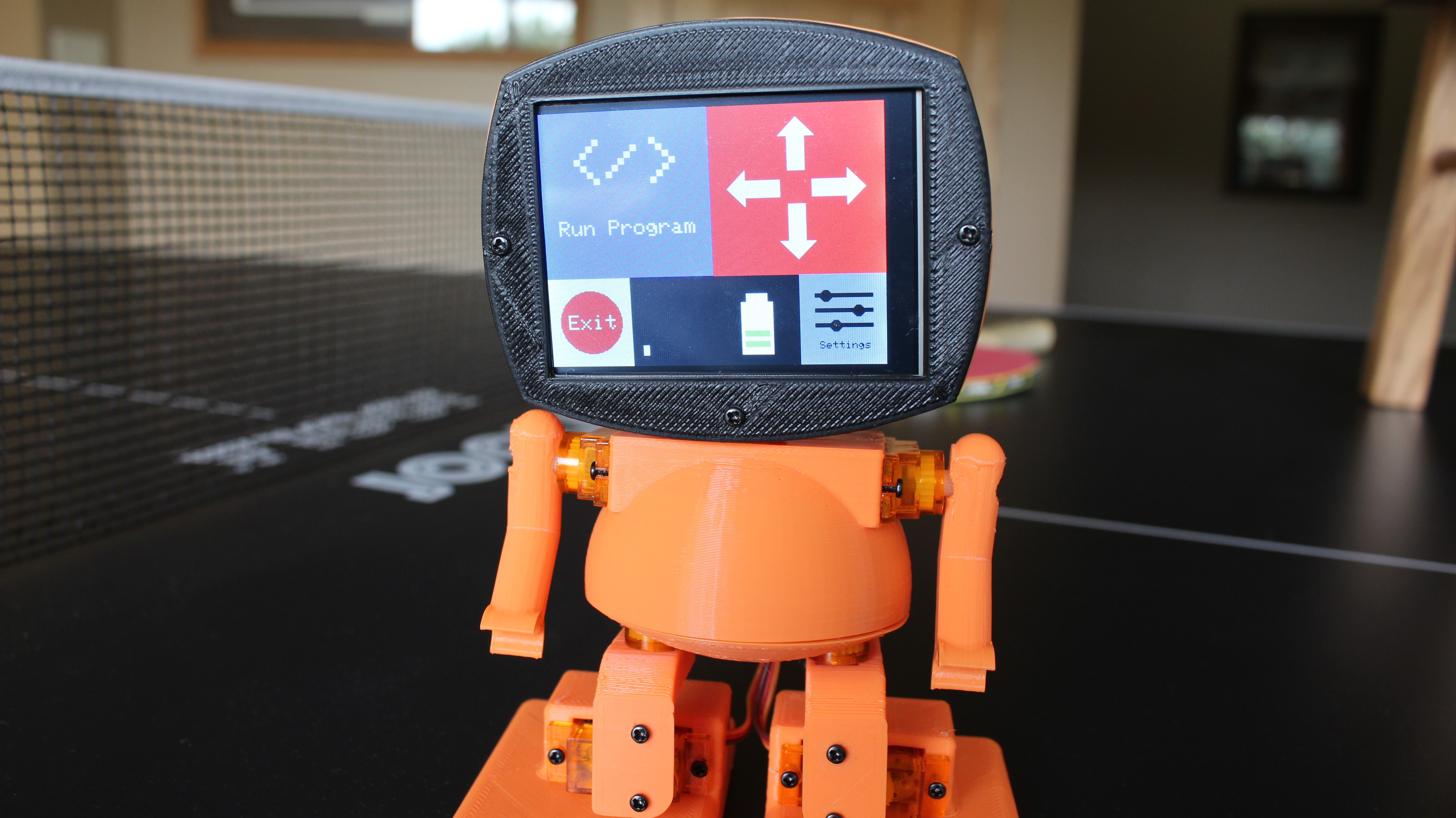
- Self programmable; program on the robots face.
- Uses an accelerometer to make walking gaits smoother and tells the robot if he has been pushed over.
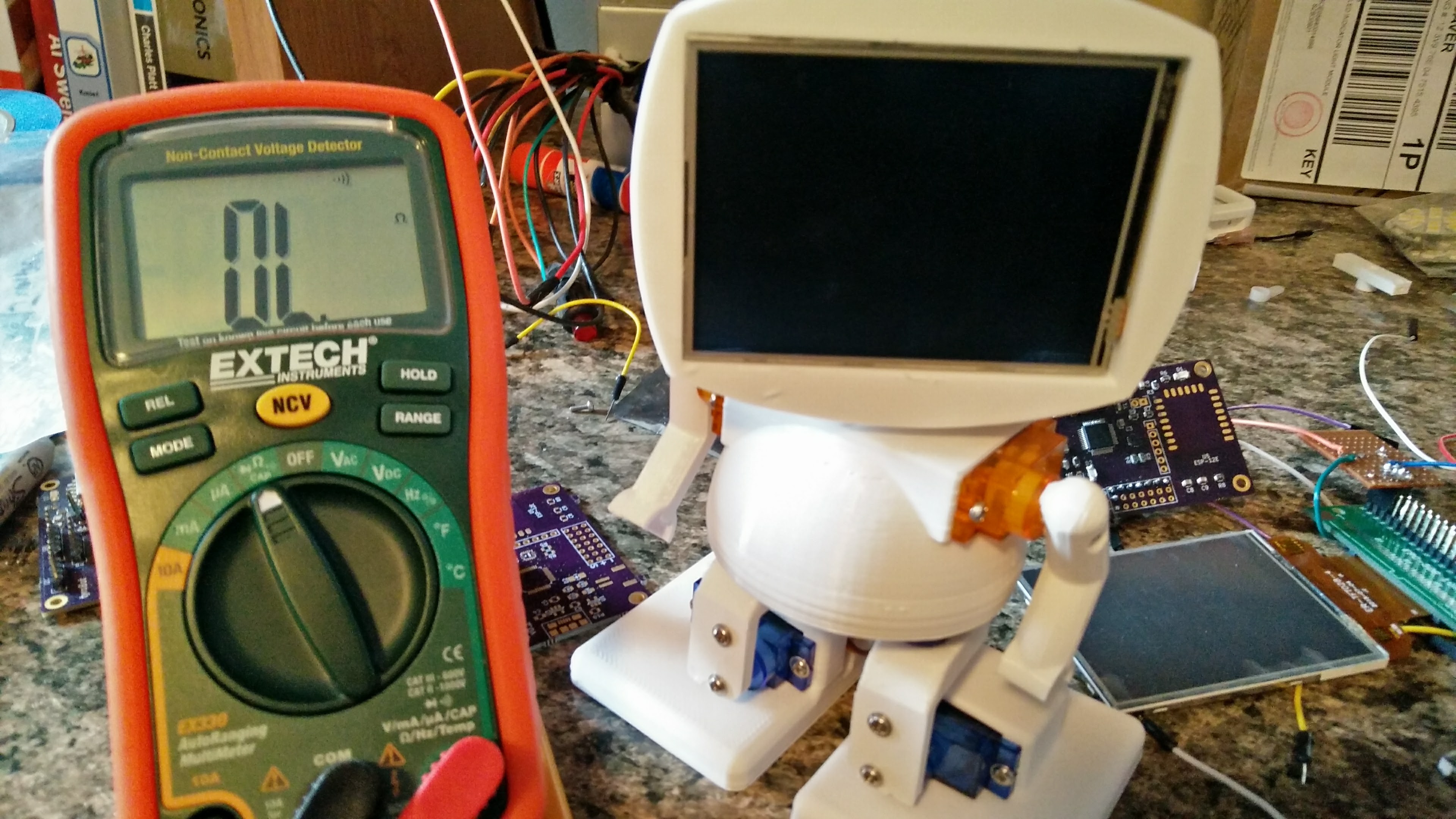
- Uses a 2.8in TFT display for running programs without a computer, configuration and more
- 7 servos for legs, arms, and head.



 While I am waiting for the new boards, I hope to get the 3D models in working order running off a ATMEGA328 so I am not wasting time waiting for parts.
While I am waiting for the new boards, I hope to get the 3D models in working order running off a ATMEGA328 so I am not wasting time waiting for parts.


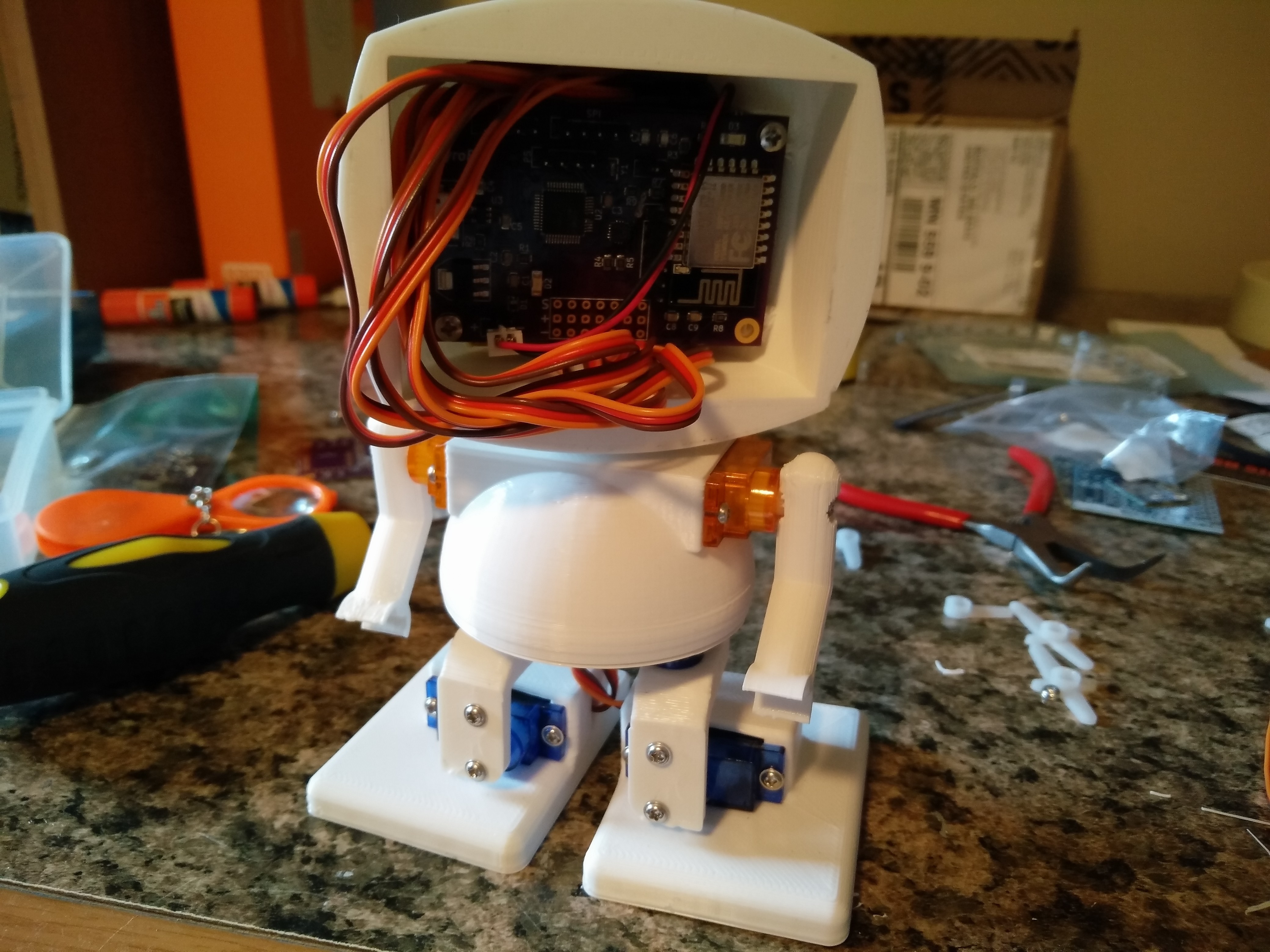
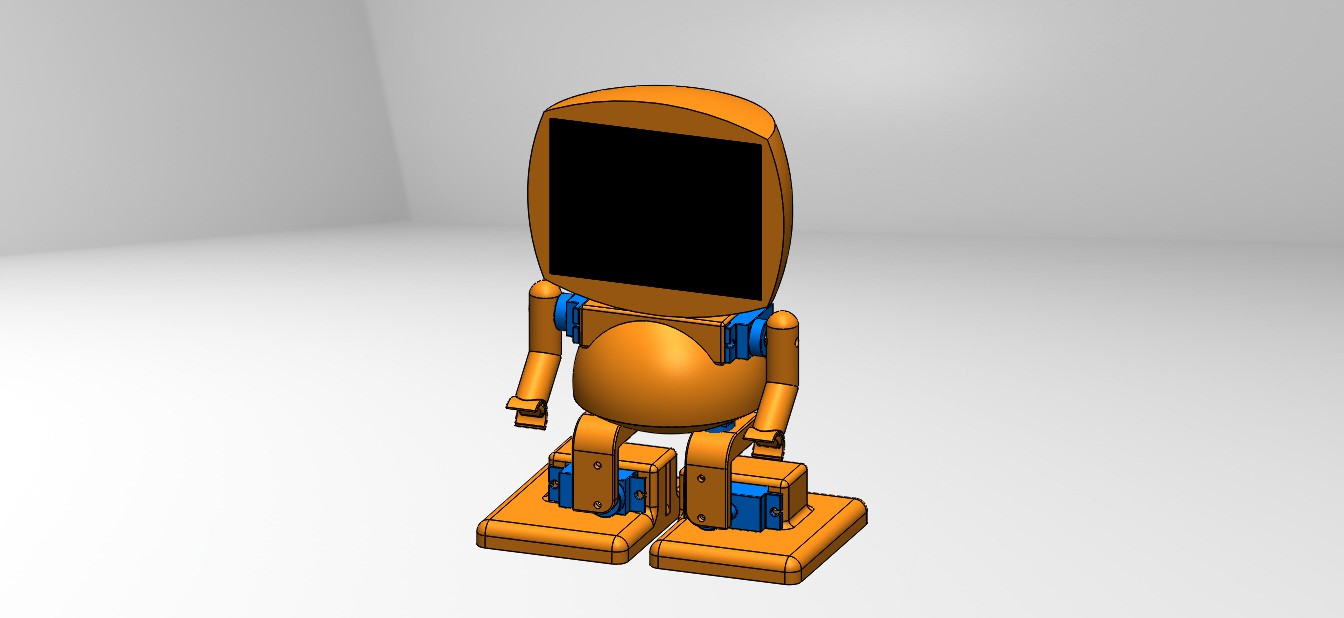 I also did some work on the arms. They are kinda boring so I will very likely change them in the future. I also decided that orange would be a good color for the robot.
I also did some work on the arms. They are kinda boring so I will very likely change them in the future. I also decided that orange would be a good color for the robot. 




 David
David
 Wissam Tedros
Wissam Tedros
 Javier Isabel
Javier Isabel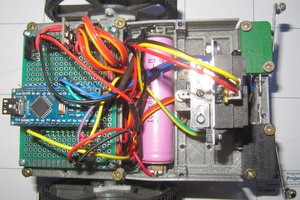
 Audrey Robinel
Audrey Robinel
I have made some libraries for the SAMD21, see my website, that may help you.
SAMD21 Timer library for the SAM15x15 and Arduino Zero
http://www.avdweb.nl/arduino/libraries/samd21-timer.html
Fast PWM-DAC library for the SAM15x15 and Arduino Zero
http://www.avdweb.nl/arduino/hardware-interfacing/samd21-pwm-dac.html
Fast analogRead / 10-bit ADC for the Arduino Uno and Zero
http://www.avdweb.nl/arduino/libraries/fast-10-bit-adc.html