Over the past week I have been iterating the 3D printed mechanical parts for #TyroBot.

Starting from the ground up, I designed TyroBot's feet. After a few different designs I finished with a foot with the servo enclosed, and much more surface area than on BoB. The servo is screwed in with the two screws that come with the servo.

Next I spent a good deal of time perfecting the legs. I tried different sizes, hoping to get a more efficient walk cycle than that I experienced with Bob. I also wanted the servo horn to be as hidden as possible. What I ended up with is on the far left. Walking has improved but needs to be perfected.

Finally we have TyroBot's body. I decided to go with a dome shape, just big enough to store the four servos for the arms and legs. There may also be room for a battery, but first I need to find a lipo that is more like a cube as most lithium ion batteries are too wide or long. Otherwise the battery will go in the head with the electronics. Hopefully weight isn't an issue...
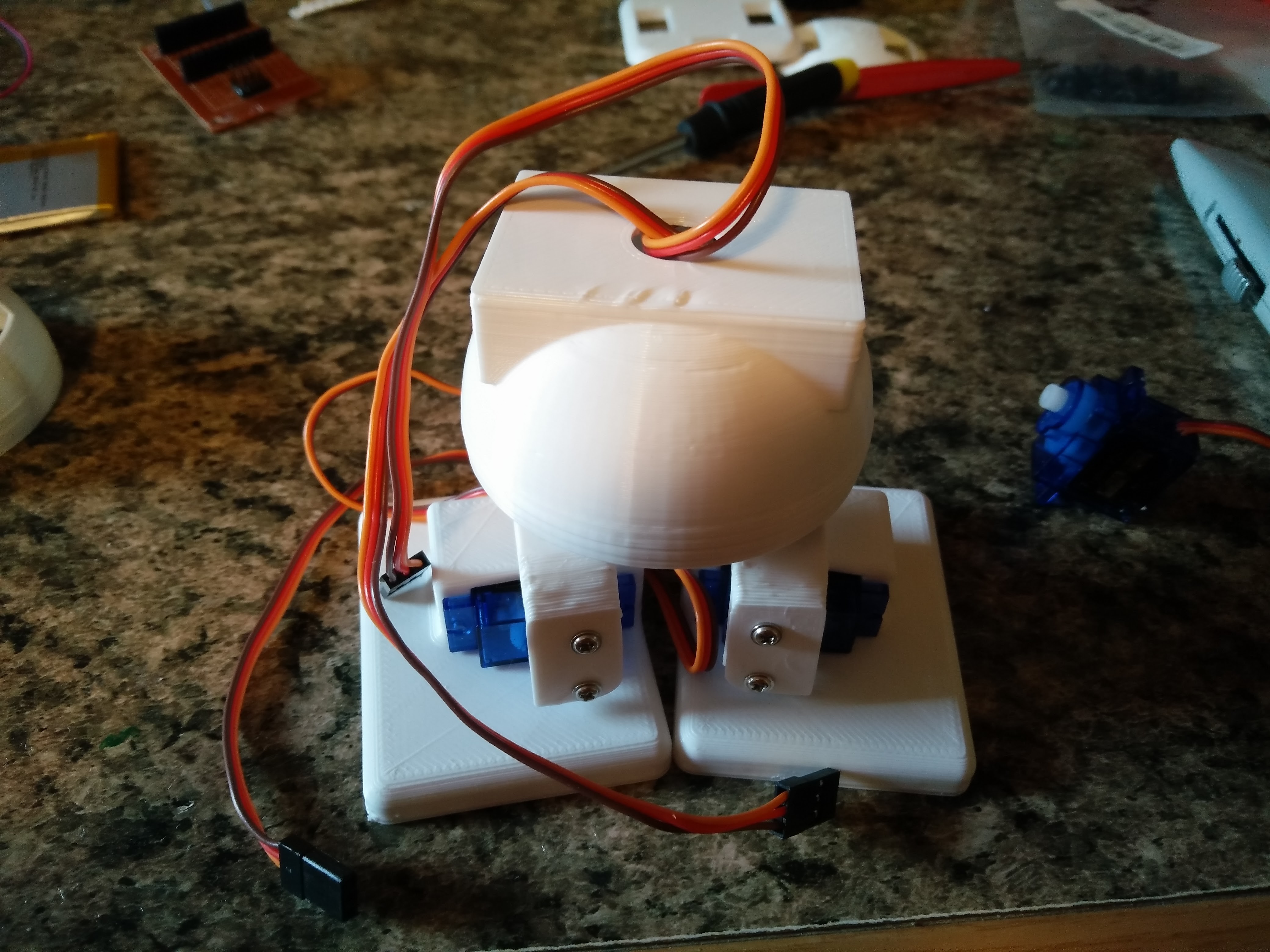
Above we have the TyroBots current form, without a head or arms. The current plan is a have a OLED or TFT display in the head for user input, but I am still contemplating different designs. Hopefully over the next week or two I'll design the controller board and get those pcbs off to @oshpark
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Actually fro the Bob, you do want the robot to be top-heavy, so putting the battery in the head may be a good decision. Then you don't need to move sideways so much to move your center of mass.
Have you considered cutting the inner corners on the feet, so that you can rotate them more without them colliding? You know, something like [) (]?
Are you sure? yes | no
Thanks for the info, that is what I will be doing. As for the feet I'm going to give them as much surface area as possible to help keep him from tipping over. Unless of course there is not enough freedom to make turns or steps properly.
Are you sure? yes | no
You know the surface area of the foot itself doesn't matter -- what counts is the area of the convex outline of what touches the ground at the moment. As long as the center of mass is inside that area (or the ZMP, if the robot is moving), then you are good, the robot won't fall.
Are you sure? yes | no