Norbert Heinz
Norbert Heinz-
R5 runs again
10/15/2017 at 13:07 • 0 commentsI have recharged the lead acid batteries of R5 and put it in my yard for another test run (until 17:00 UTC+2):
http://www.homofaciens.de/robospatium-controlstation-R5_en.htm
It runs with my latest creation R6:
http://www.homofaciens.de/robospatium-controlstation-R6_en.htm
![]()
More "double" or maybe "triple" runs will follow as son as R7 is up and running.
-
I will shrink the robot!
04/10/2017 at 19:21 • 0 commentsShipping costs for the large robot I had in mind, are simply too expensive for me to send it to international locations. That's why I decided to shrink the world tour robot and implement no more electronic components than needed to drive around:
A Raspberry Pi Zero WLAN, drive motors, a voltage regulator and a camera. Running two HackadyPrice entries at once was simply too much work in 2016, which is why this robot project did not get the attention it should have. In 2017, my one and only price entry will be the small robot version:
https://hackaday.io/project/21094-earth-explorer-in-a-small-parcel
Follow me through this years HackadayPrize and see what happens...
![]()
-
Crowdfunding failed? No - it starts now!
08/21/2016 at 14:44 • 0 commentsI missed my campaign goal on Indiegogo, but finally got 333,-€ from all backers (many thanks). 5% of the money was subtracted from Indiegogo (just to feed their servers, there was no human contact), another 5% were needed to transfer the money virtually to my banking account, thus 316,35€ went to my project.
My conclusion?
1.) Indiegogo gave the campaign no extra boost, but I simply had to try it ;-)
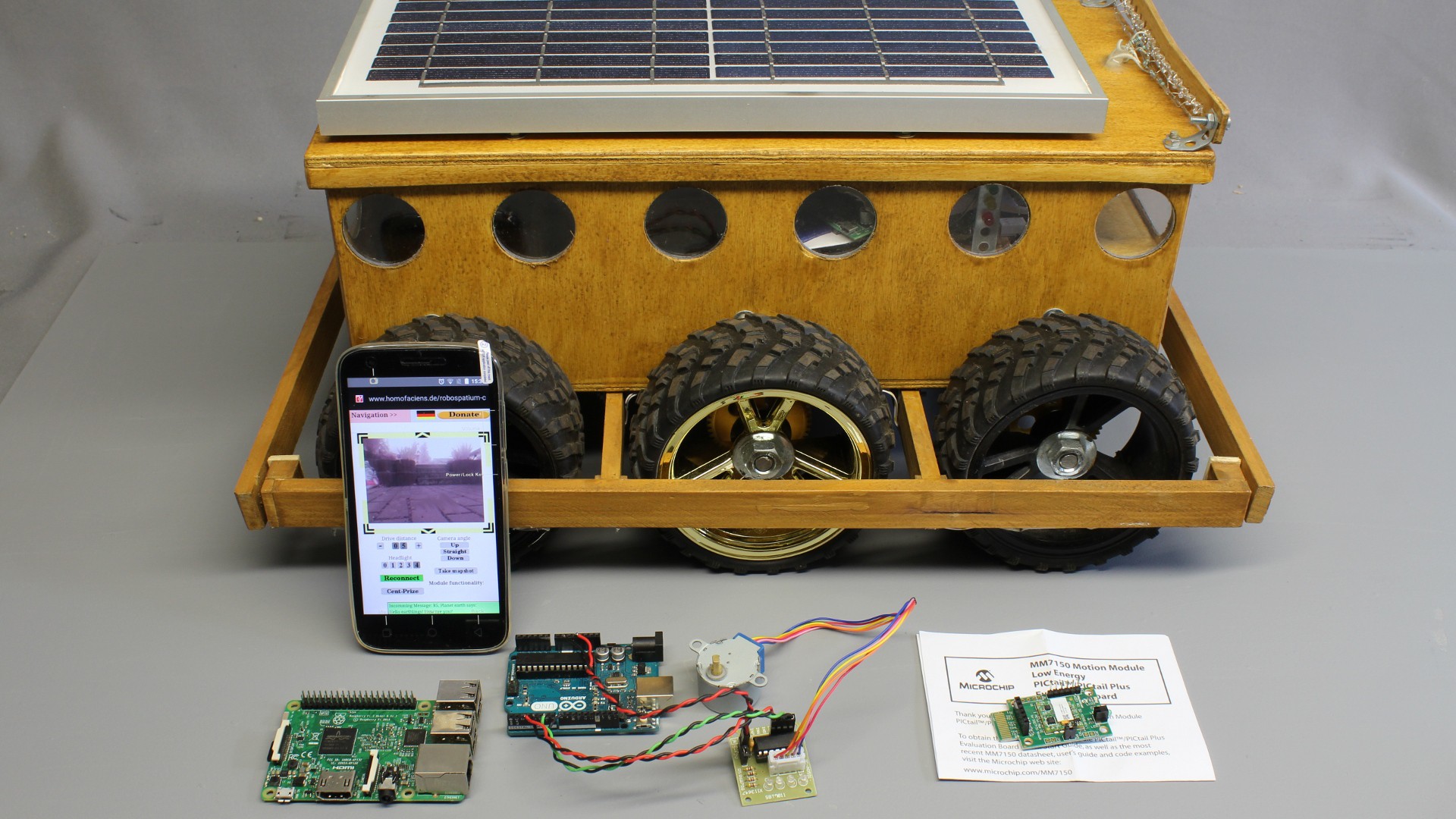
2.) With the small budget, the world tour robot must become smaller than the prototype. The best shipping is done in a 60x30x15cm box with no more than 2kg. That's the challenge all space missions have to deal with: Make is small and lightweight.
3.) The mission itself will be made more simple. The main idea is to have one camera on the robot - first and foremost humans want visual contact with remote areas on planet earth.
The first investments:
![]()
I spent 30,-€ for 10 stepper motors (2 packs 5 pieces each) type 28BYJ-48 with ULN2003 driver boards that will be used as brushless drive motors and for pointing the camera up/down, eventually for more actuators.
I have a Raspberry Pi and an Arduino in stock - looks like this will be another project I have to fund (at least parts of it).
I spent 54,-€ for a smartphone that will be used to connect to Internet (either as WLAN hotspot or via USB tethering). It's my first smartphone ever. The first benefit in having such a pocket computer is an improved responsive web design. You can now use the control center also in portrait mode:
![]()
I got a MM7150 Motion Module from MICROCHIP, as a gift from the Digi-Key, because I was a winner of the digi-prize:
http://www.digikey.de/en/resources/social/digi-prize
I will implement that sensor in R5 to see how it can be used to give the robot a better directional stability and maybe a compass.
If you'd like to back the world tour, simply add a comment when making a donation on my pages:
http://www.homofaciens.de/support-donation-main_en.htm...and if the HackadayPrize jury likes the idea of automating globe trotting, the tour will start soon.
To prove that the campaign still runs fine, have a test run with R5. It is up and running today (August 21st) from 16:30 to 18:30 CEST (UTC +2):
http://www.homofaciens.de/robospatium-controlstation-R5_en.htm
-
Automate globetrotting
08/11/2016 at 15:15 • 0 commentsI have submitted my world-tour-robot project to the "automation" round of this years HackadayPrize, because with that robot you can trot around the globe without leaving your desk.
R5 is already a winner:
Digi-Key is one of the sponsors of this year's HackadayPrize and they have some extra gifts for all participants. Simply submit your entry and follow the instructions on their page:
http://www.digikey.de/en/resources/social/digi-prize
That's what I did and my robot project was one of the winners! The gift I received is a MM7150 Motion Module from MICROCHIP. It will give R5 a tilt sensor and hopefully a better directional stability in rough terrain, soon. Would be nice if the magnetometer can be used as compass (all the motors and servos could cause too many interferences).
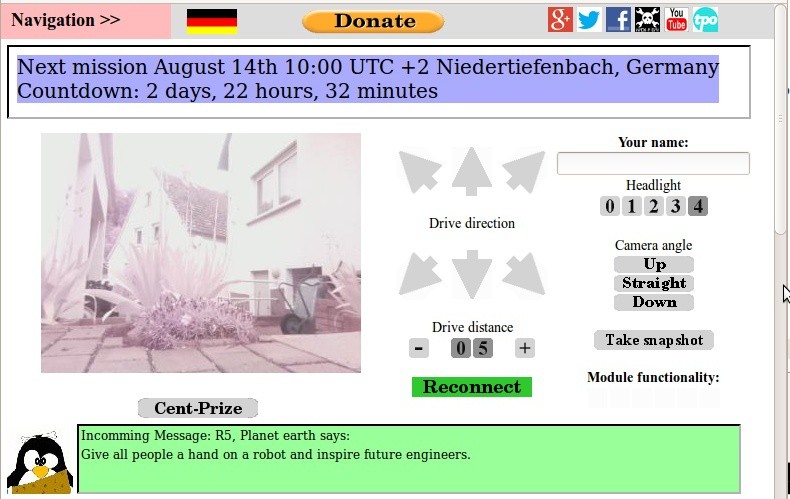
New interface
I have cleaned the design of my pages, especially that of the control interface:
![]()
Now you can see the countdown clock, indicating the time until the next test run starts, in the message window.
Next public test is on Sunday August 14th at 10:00CEST (UTC +2) and at 19:00 UTC+2. Go to the control center to drive R5:
http://www.homofaciens.de/robospatium-controlstation-R5_en.htm
-
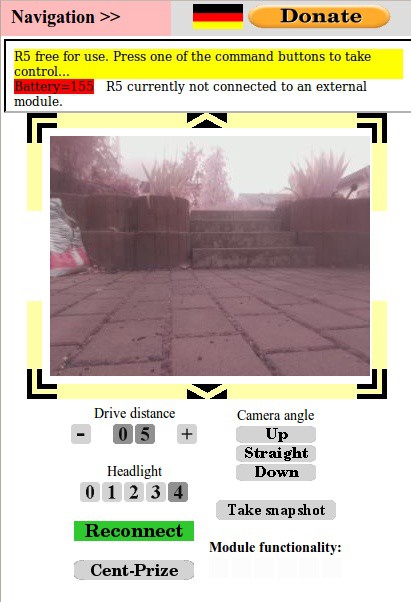
First sensor data transmission
07/31/2016 at 06:38 • 0 commentsThe first sensor data transmitted is the raw value of the Arduino ADC input connected to the battery. The transmitted value turns red if the battery is nearly discharged. There is currently no implementation of an automatic shutdown, but that will follow soon to prevent the batteries from deep discharge.
The NoIR camera is installed and the robot will be live on July 31st from 10:00 to 12:00CEST (UTC +2) and after recharging the batteries from 19:00 to 21:00CEST (UTC +2). Drive it in the control center:
http://homofaciens.de/robospatium-controlstation-R5_en_navion.htm
![]()
My old 2CV looks even older through the NoIR camera eye...
-
After a mission is before the next mission
07/17/2016 at 20:06 • 0 commentsWhen installing the NoIR camera module I accidentally cracked the ribbon cable (it was a bit too short...). A new (longer) replacement will arrive this week.
During test run it was a sunny day, thus with the solar panel, the operation time was 3h in the morning and another 2.5h in the evening (after recharging the batteries with mains power).
![]()
The next test run will start in a week on Sunday, July 25th at 10:00 CEST (UTC +2) with (eventually) another session in the evening at 19:00 CEST:
http://www.homofaciens.de/robospatium-controlstation-R5_en_navion.htm
Hopefully with the NoIR camera and some software updates.
Thanks to all drivers that gave a feedback!
-
IR camera module arrived
07/11/2016 at 11:19 • 0 commentsToday, the Raspberry Pi NoIR camera module arrived. There is a IR filter in the package so that you can also use this device as normal camera:
![]()
Especially plants look totally different without the IR filter, thus the NoIR camera is not only an improvement during night hours.
Hope to get it run (with a servo adding or removing the IR filter) for the next test run of R5 on July 17th:
http://www.homofaciens.de/robospatium-controlstation-R5_en_navion.htm
Let's reexplore planet earth!
-
Next public test run, first outdoor mission
07/09/2016 at 22:45 • 0 commentsThe network connection during the first public test run wasn't best and my provider made an upgrade of the servers software, which also caused trouble (and unfortunately still does).
The second attempt will start on Sunday July the 17th at 10:00CEST (UTC+2):
http://www.homofaciens.de/robospatium-controlstation-R5_en_navion.htm
The robot will drive around my home, thus it will become the first outdoor mission and for sure the network won't trouble the mission...
The camera is currently the only sensor of the robot, but that's enough to do science. Just think of the countless studies based on photos from Луноход, Spirit, Opportunity or Curiosity.
Who can take a picture of an "alien life form" (no plants) with the camera eyes of the rover? Don't think that will be an easy job. The rover motors are loud, thus birds will very likely not come close to the vehicle.
![]()
Well, I am not living in the jungle (the above picture was taken with the rover camera in a nearby forest), but maybe a cat could come along or watch out for beetles and ants to take an alien shot...
The first submission will get a CentPrize!
-
Video and first public test run in Lemiers, NL
06/23/2016 at 14:40 • 0 commentsI have made a video showing R5 in more detail:
The first public test run takes place on Saturday 25th of June 2016 at 11:00CEST. Its the EUREGIO MAKERSPACE: GRAND OPENING in Lemiers (Netherlands). Meet me and my robot in Lemiers or visit the event through the camera eye of R5:
http://homofaciens.de/robospatium-controlstation-R5_en_navion.htm
-
First public test run in Lemiers, Netherlands on June 25th
06/21/2016 at 05:59 • 0 commentsI will be at the EUREGIO MAKERSPACE: GRAND OPENING in Lemiers, Netherlands on June 25th 2016.
The event starts at 11:00CEST (UTC +2) with open end.
It will be the first public test run of my prototype R5. Come to Lemiers to meet me and the robot or explore the event through the camera eyes of R5.
The blog of the free makers with event details:
http://freie-maker.de/2016/05/euregio-makerspace-big-opening/
Outdoor robot
A remote controlled robot transmitting live video streams to your browser.