 ThunderSqueak
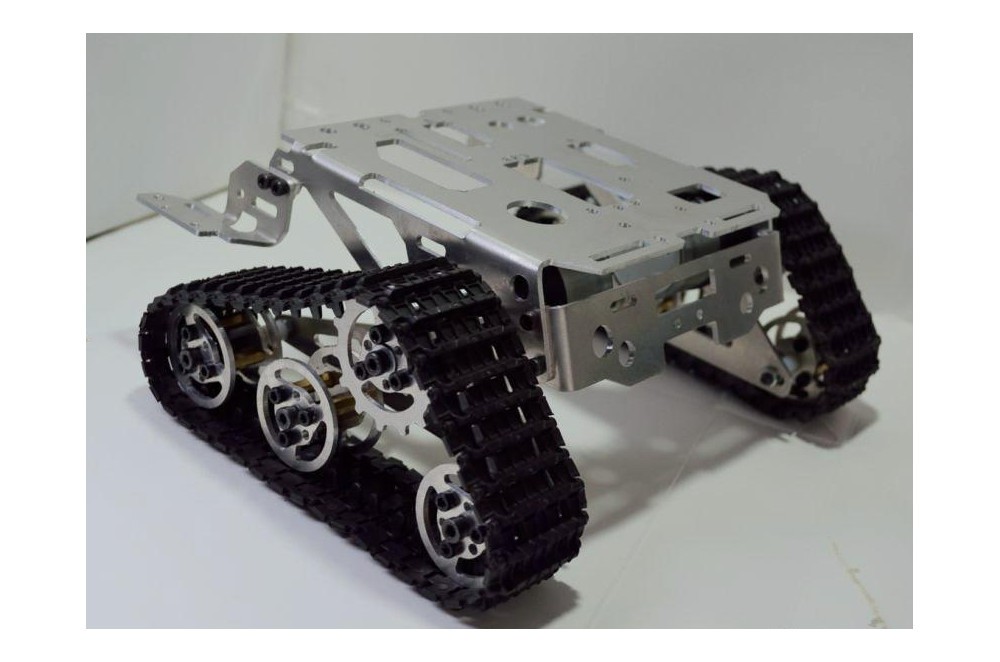
ThunderSqueakI was considering options for the lower chassis, After a lot of thought, I am considering something along these lines.
I also have decided to change the main computer to a Rasberry Pi 3 B, I know it will use more power but I think the added power should be helpful as the system gets more advanced. It also has the added benefit of already having bluetooth and wireless built in. This should free up USB ports.
The upper chassis will be made from aluminum stock from the local hardware store. The body will bend in the middle with a single linear actuator made using a stepper and belt configuration, much like you would see in a CNC machine. The linear actuator will cause the body to stand up or collapse as needed for balance.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
[this comment has been deleted]
Thanks, I figured it is as good a time as any to build a robot. Most of it so far has just been writing down ideas as they happen, then when I get time try them out. :)
Are you sure? yes | no