 Reed Foster
Reed FosterWhat are Inverse Kinematics?
Forward kinematics are used to determine the position of the end effector of a segmented armature or leg (or anything else with joints) with known values for the angles of each joint. This can sometimes be useful, but rarely do we want to know where the end of our robot arm or hexapod leg is going to end up if given some specific angles. Inverse kinematics are the opposite of forward kinematics, in that the position of the end effector is known, and the values of the angles are unknown. This is very useful if we want to move to a particular position, the problem is that the calculations required to determine the angles are significantly more complex than those of forward kinematics. I found two websites that were of some use to me: https://oscarliang.com/inverse-kinematics-and-trigonometry-basics/ and http://www.societyofrobots.com/robot_arm_tutorial.shtml.
Alright, Let's do Some Math!
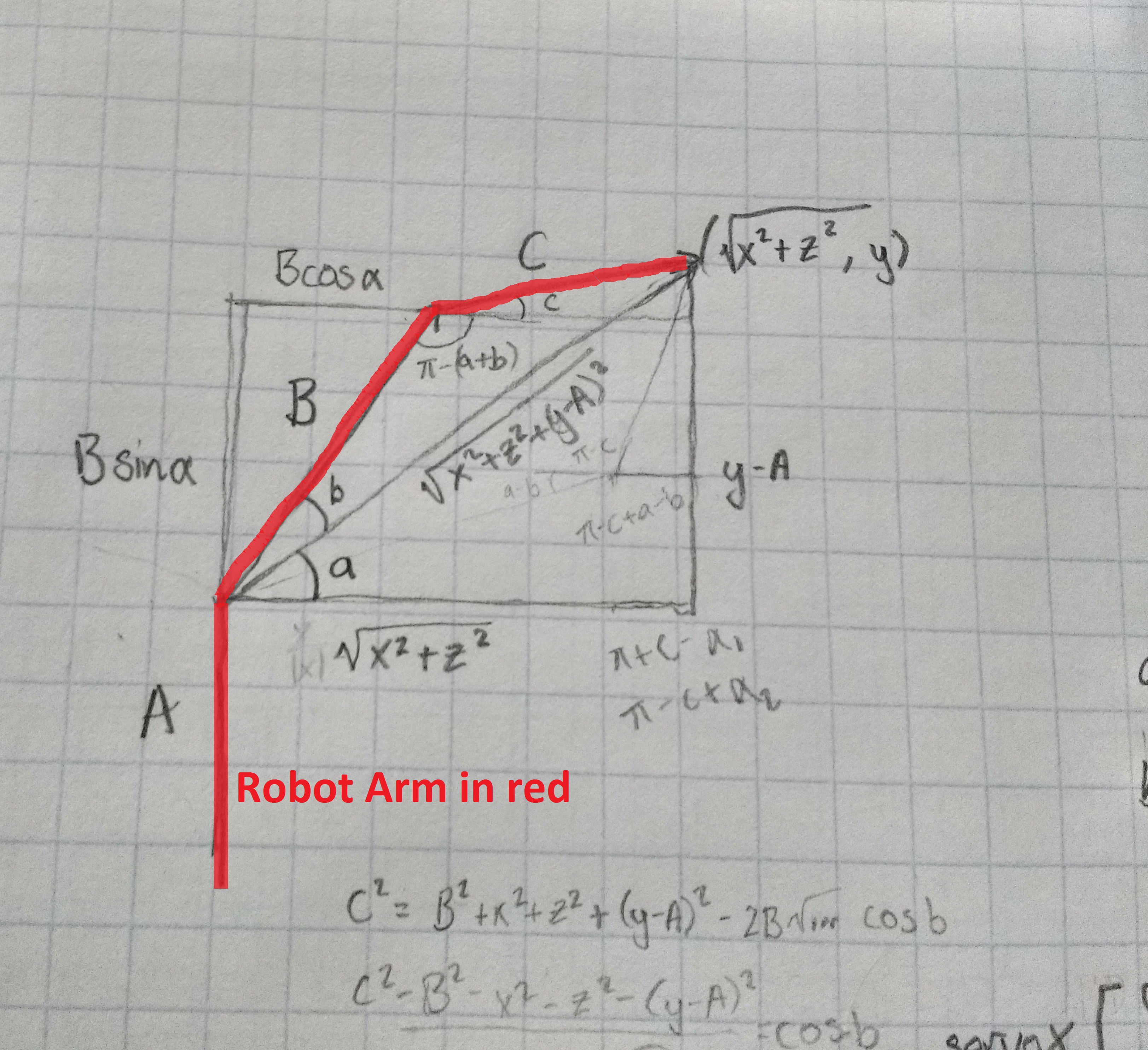
I found it very useful to do some drawing in a notebook, because I can add and solve for angles more easily if they are right in front of me.
More to come later


Hi, it's great to see people working on this! I struggled with it myself for #Tote, but after a lot of tries finally succeeded in something workable. I tried to explain it in the documentation at http://tote.readthedocs.io/en/latest/ik.html -- there is also the code for it, both in Arduino and in Python. I hope that helps!