 AVR
AVRRevamping an old Parallax Boe-Bot
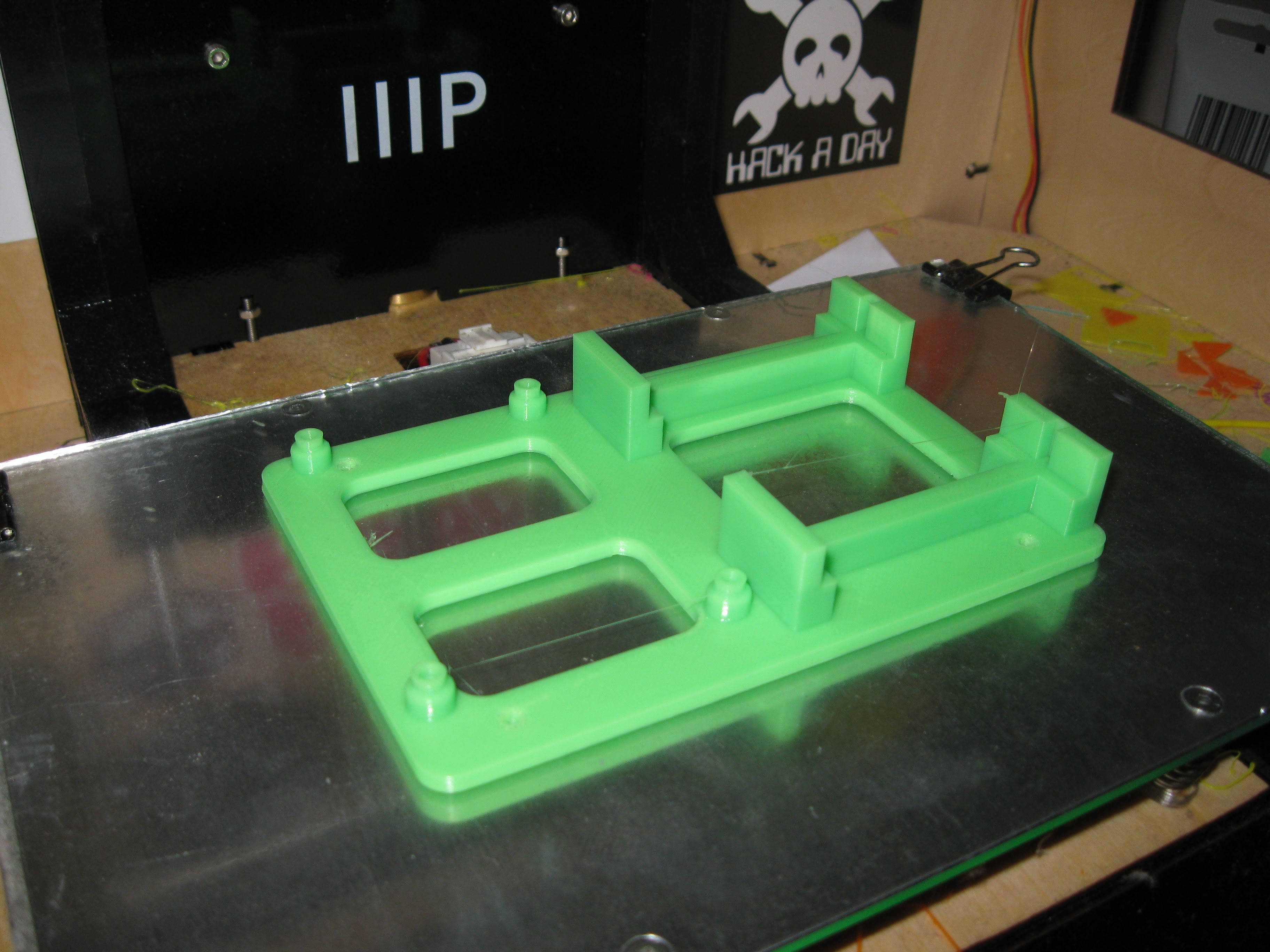
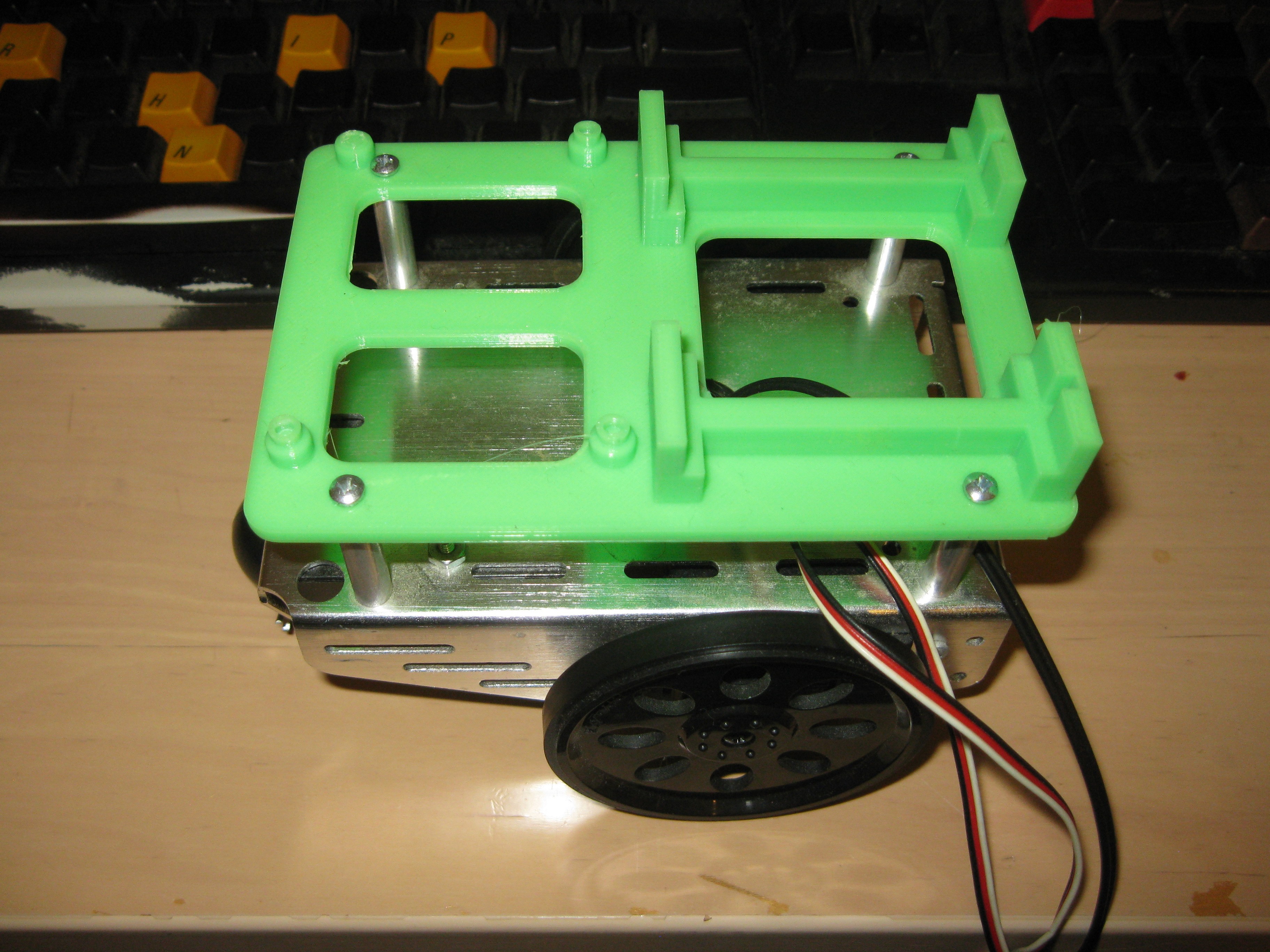
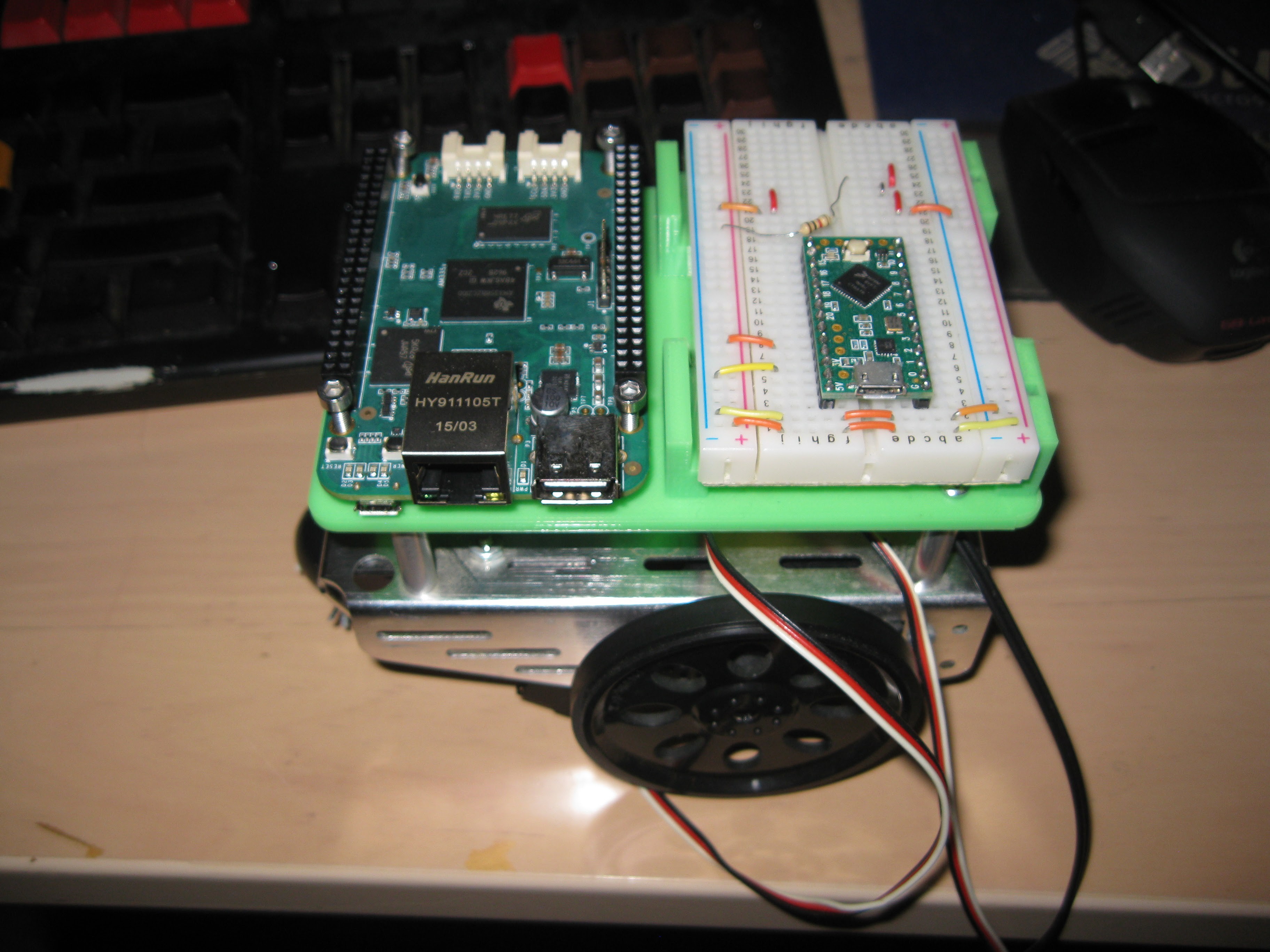
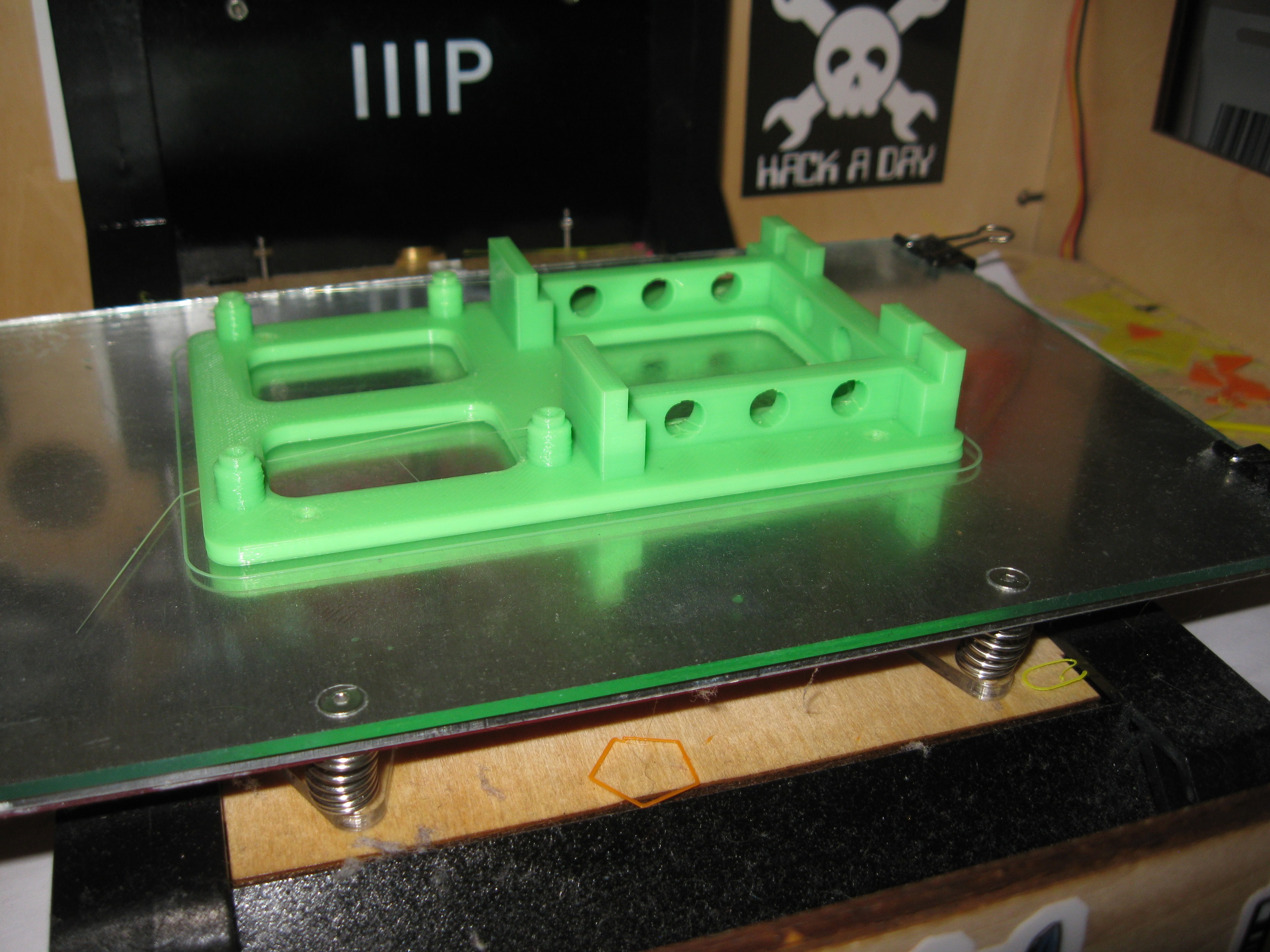
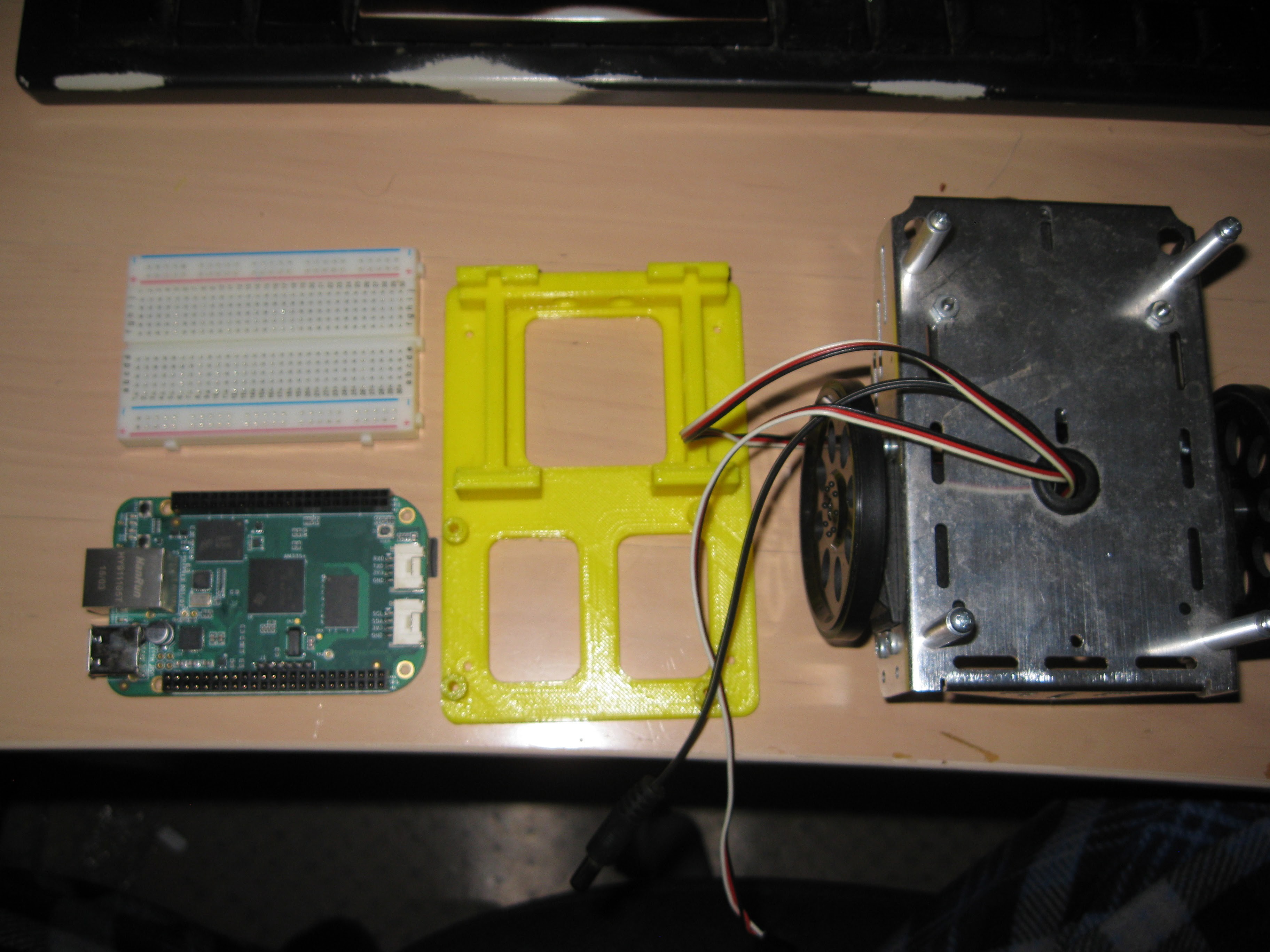
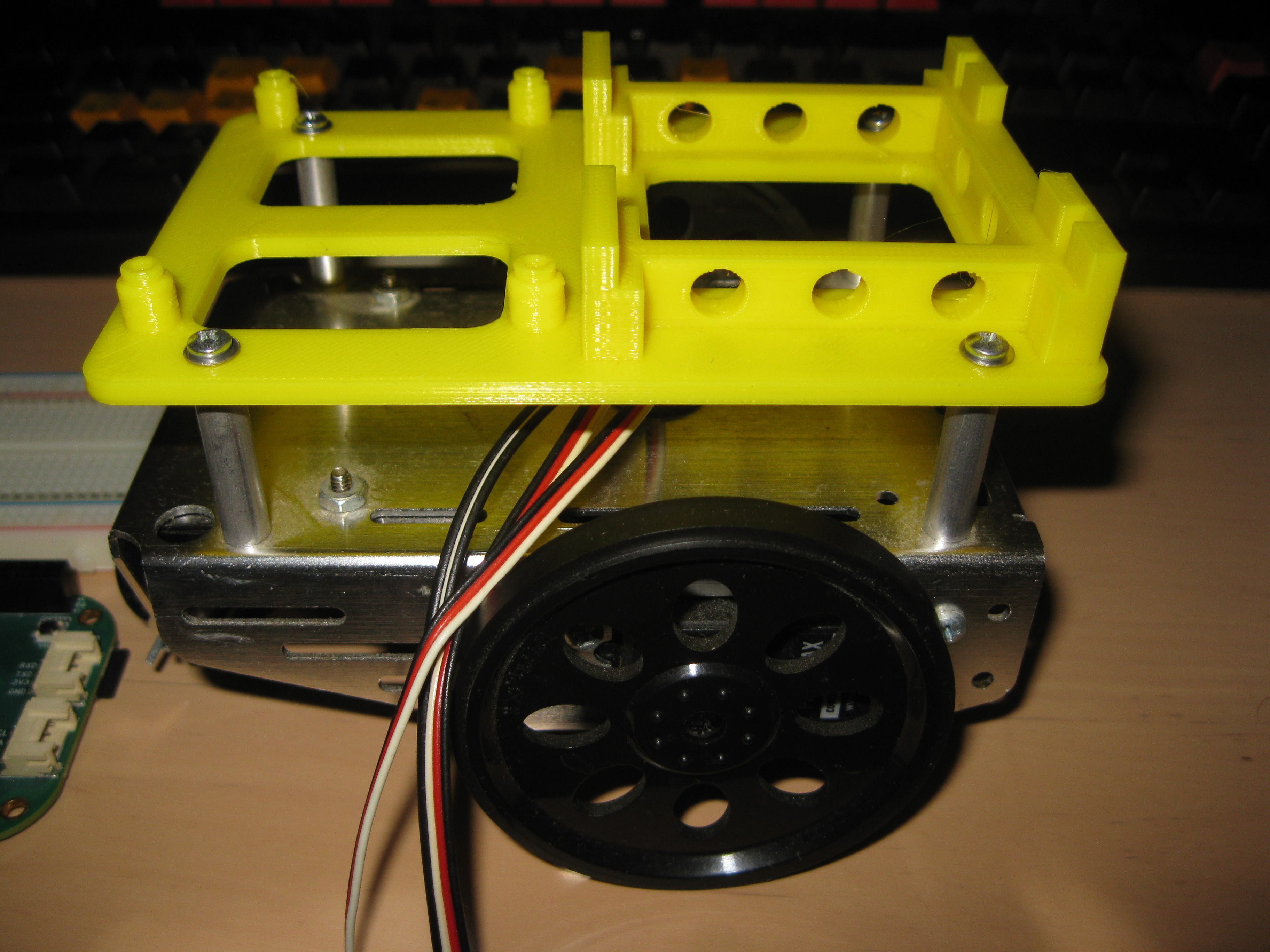
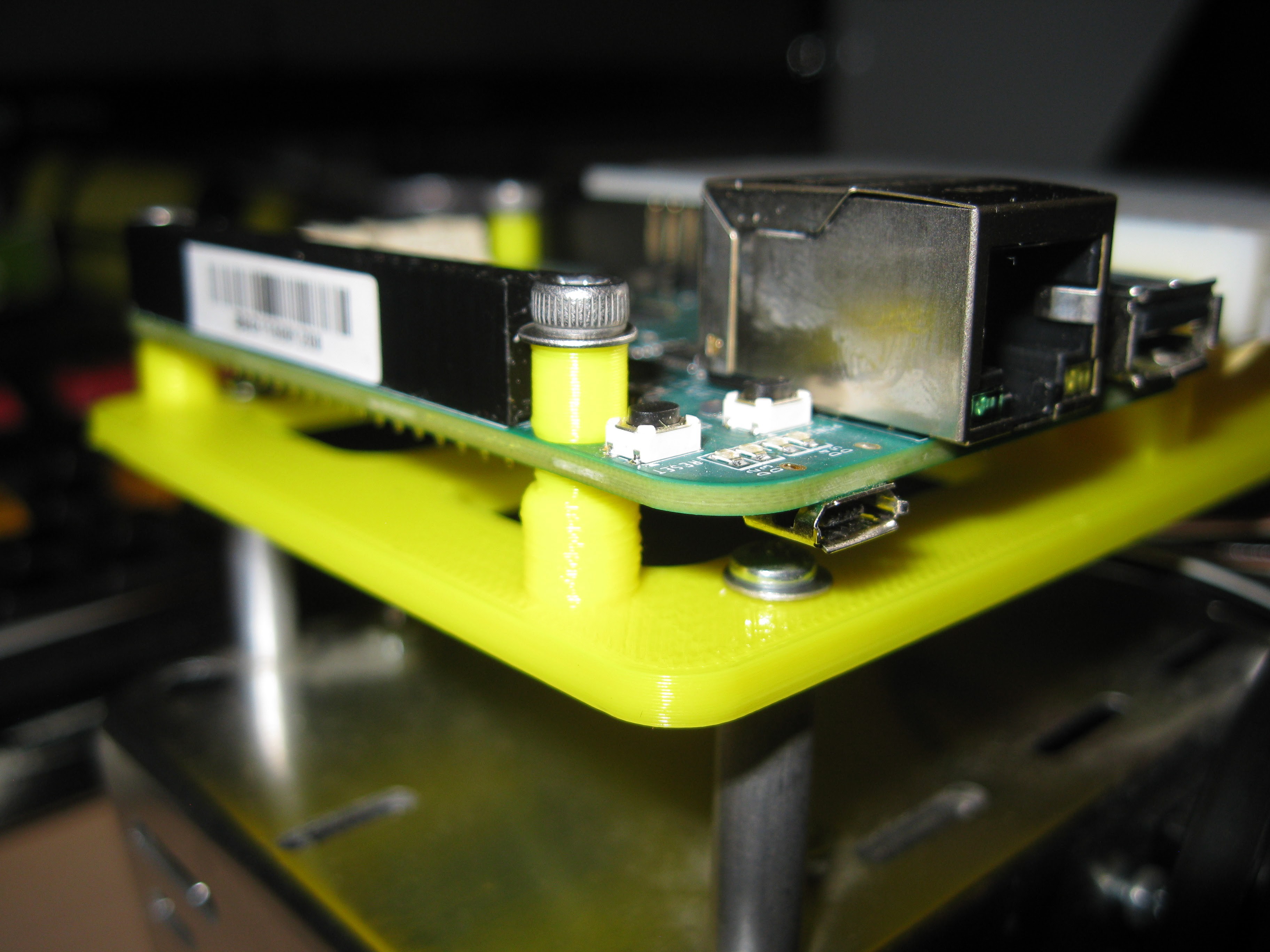
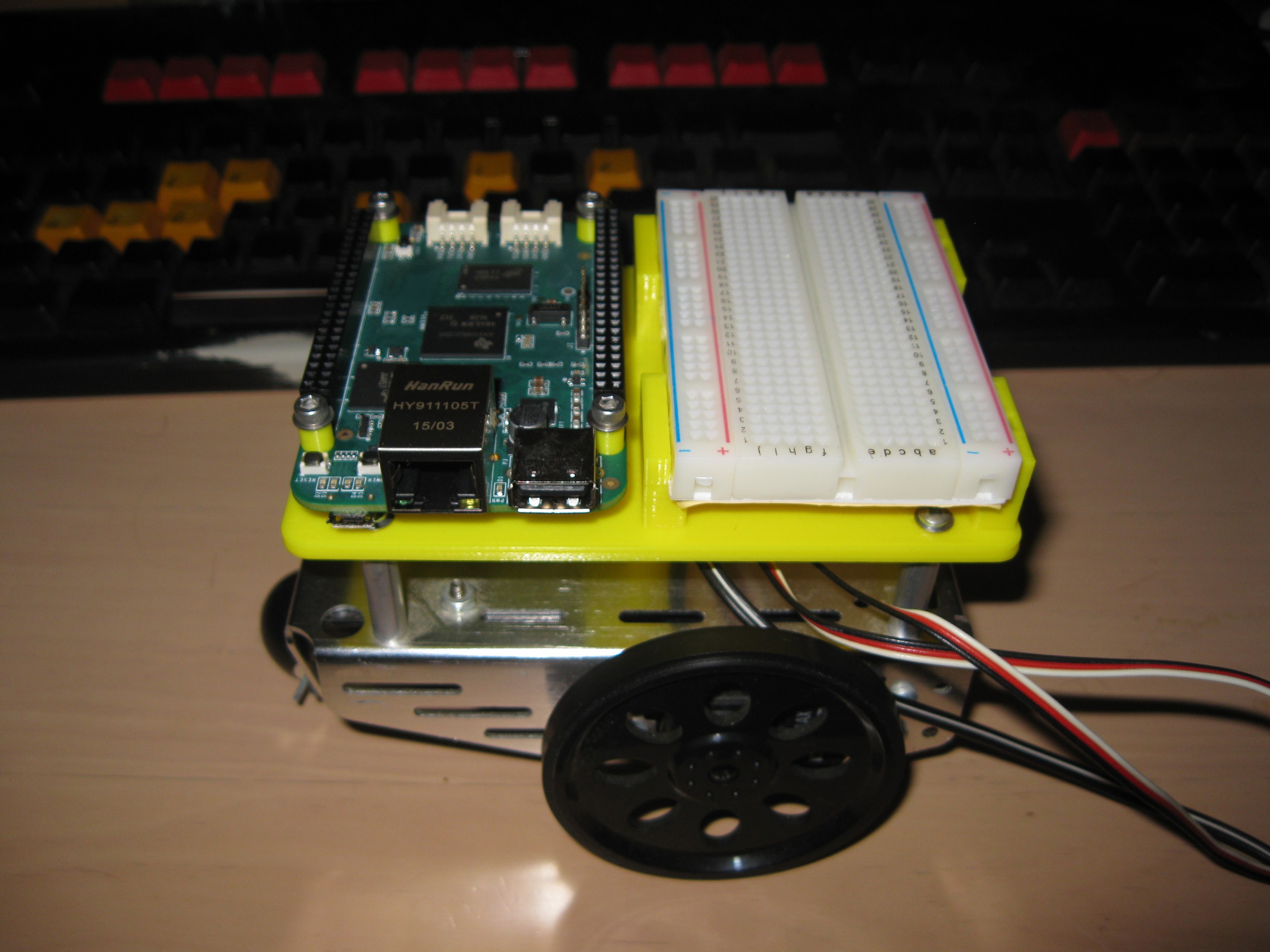
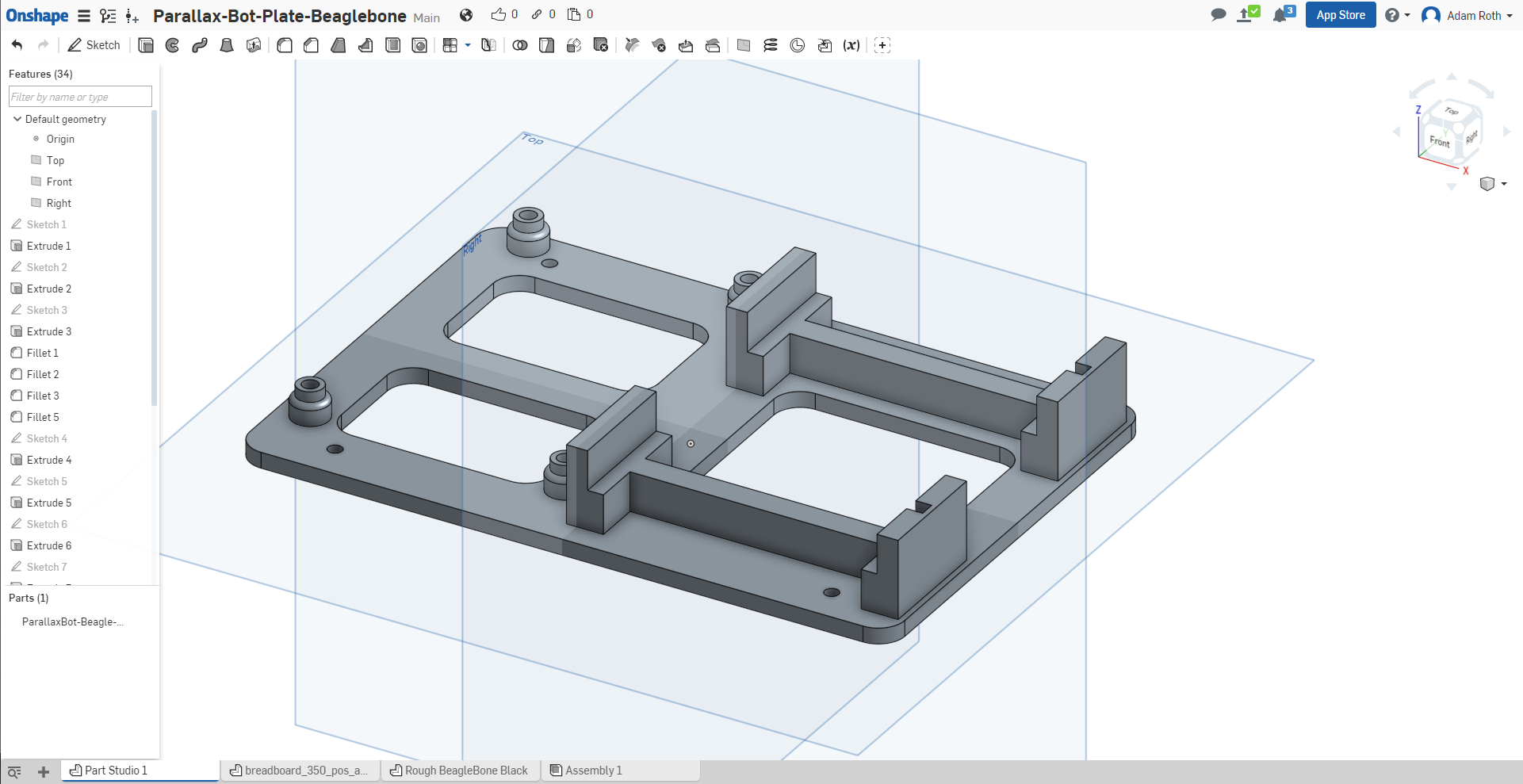
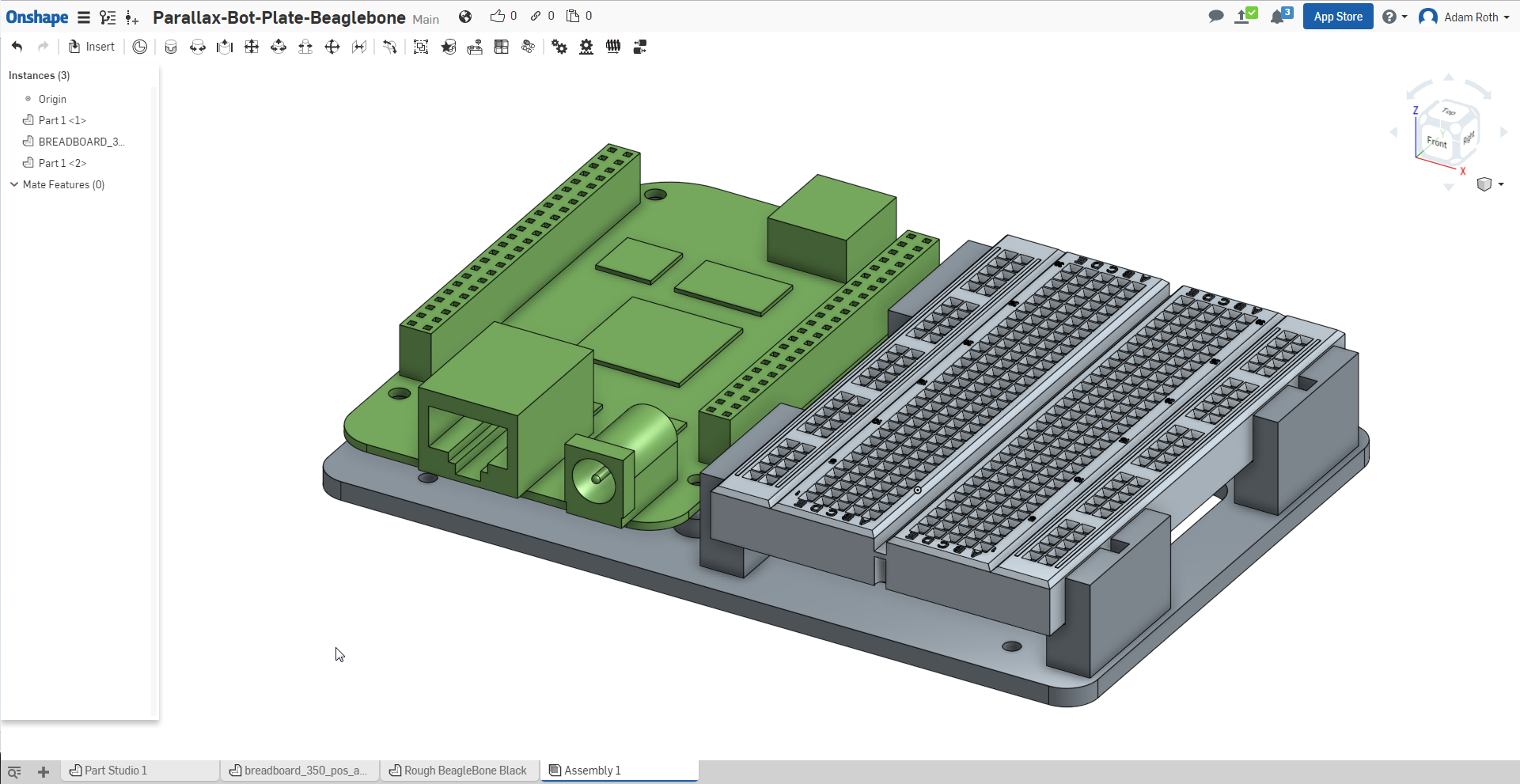
This project is basically the refurbishing and revamping of an old Parallax Boe-Bot robot kit. This kit and robot are still made by Parallax, it comes with a basic stamp board, metal chassis, wheels, continuous servos, and some components. I recieved mine intact but with some weird circuit on the breadboard that didn't appear to work anymore with the code on the stamp. Sine the stamp is old and before my time I shelved it as a piece of history and decided a beaglebone would be much better. My plan is to get the robot running off a Beaglebone mounted with a custom 3D printed mount, that holds the beaglebone and a breadboard. I plan to drive the continuous servos with a TeensyLC or Arduino Pro Micro (AVR GPIO = good for servos) connected to the Beaglebone green via USB hub, also on the USB hub will be an edimax wifi dongle for teleoperation mode.
In addition to the hardware upgrade this robot will be receiving a software upgrade with a simultaneous localization and mapping program for some impressive navigational abilities!
Parallax SLAM Bot Specs
- Beaglebone Green (WiFi, Camera, Master control program)
- TeensyLC/Arduino ProMicro (servo driver)
- Parallax Boe-Bot aluminum chassis
- x2 continuous servos w/ wheels for drive
- x3 Microservos for moving sensors and cameras.




Adam,
May I suggest you also take a look at the Parallax Propeller 1 and 2 (upcoming) controllers. I have a similar platform with a Propeller 1, and it can do all you are looking for.