 igorfonseca83
igorfonseca83Robot's structure was initially designed using 123D Design software. The left arm (highlighted in red in the image bellow) is under construction, and was divided in three parts to meet 3D printer maximum dimensions.
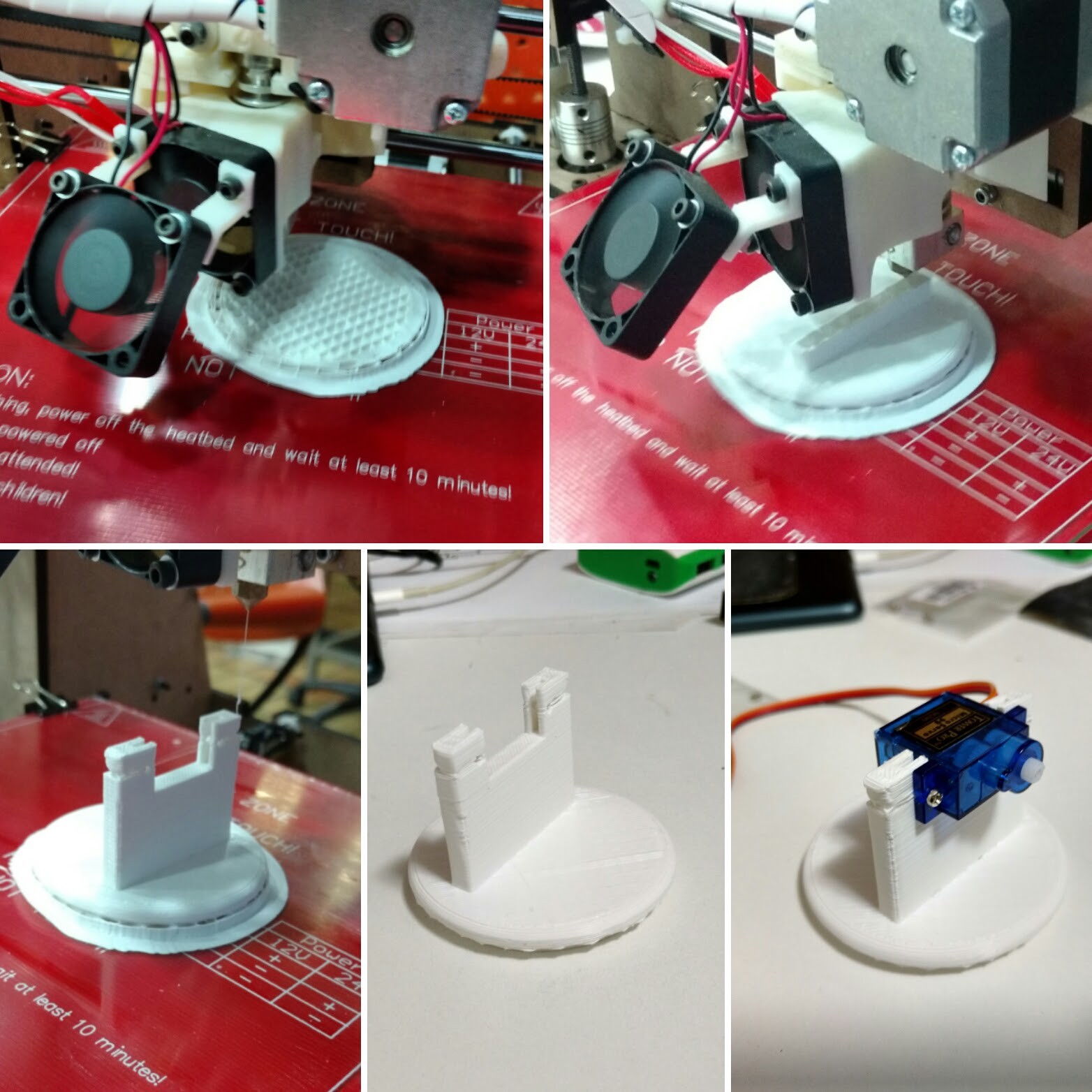
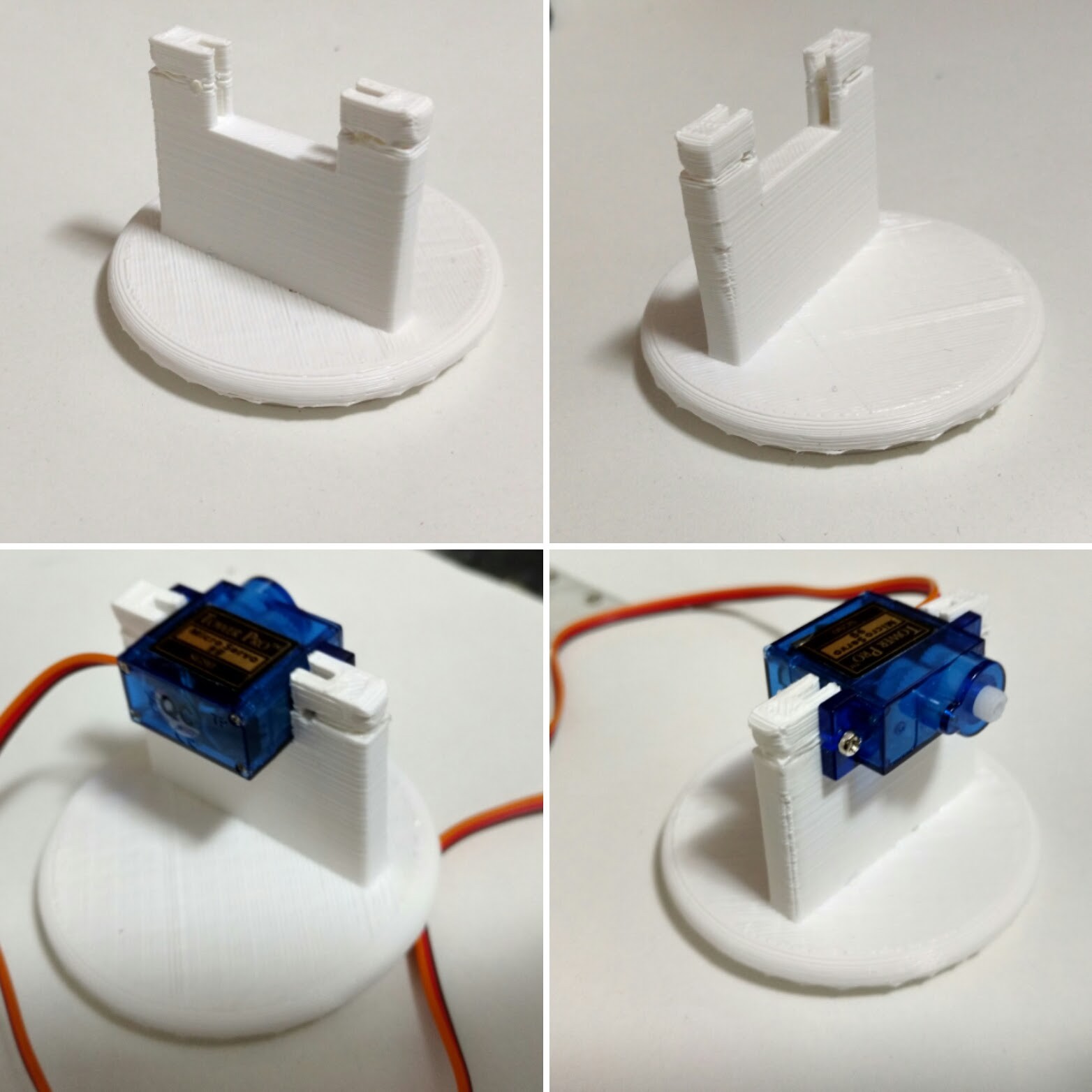
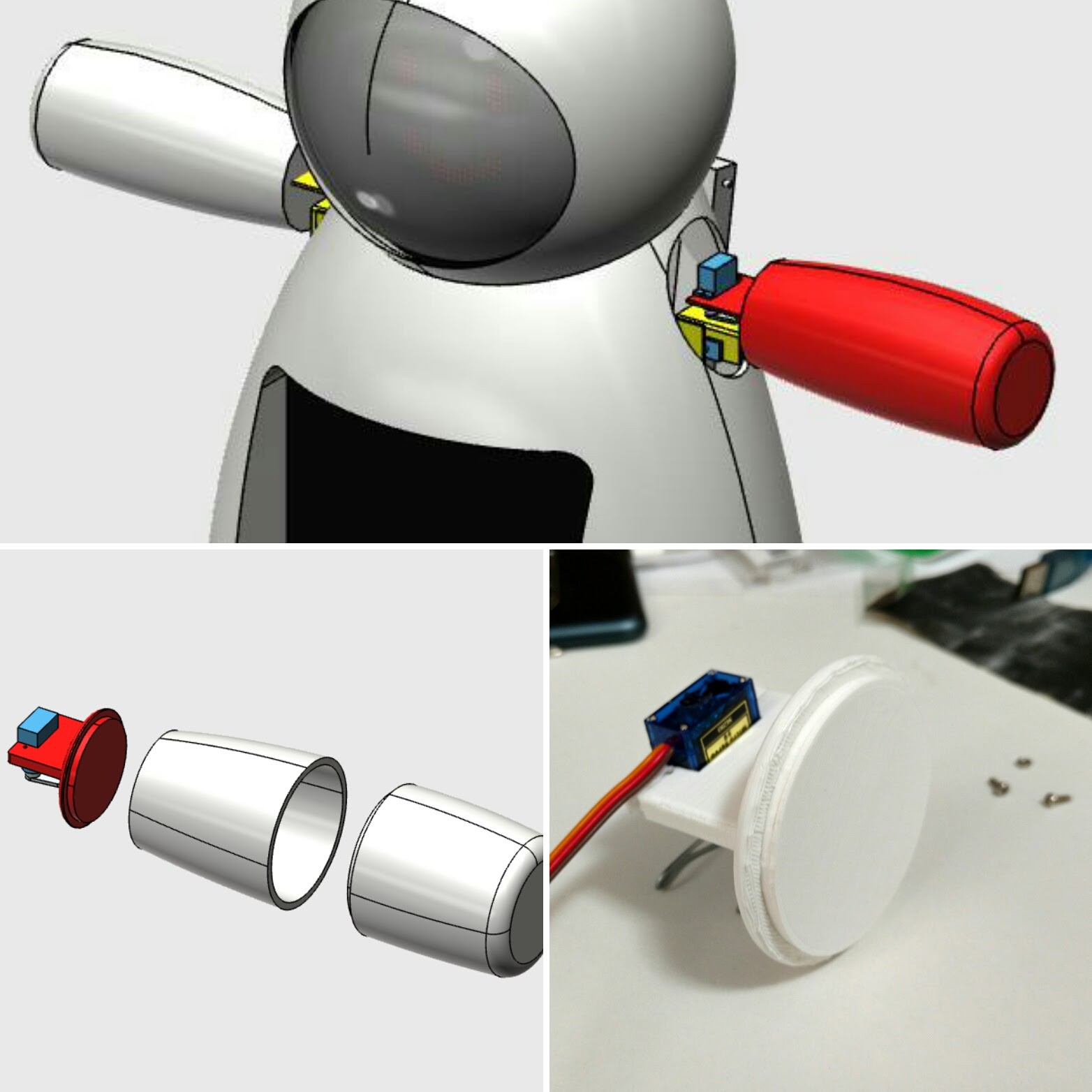 The fist part is the joint where servomotor is attached. It was 3D printed in PLA, and the SG90 servo was mounted using bolts and nuts.
The fist part is the joint where servomotor is attached. It was 3D printed in PLA, and the SG90 servo was mounted using bolts and nuts.
A estrutura do robô foi inicialmente projetada usando o software 123D Design. O braço esquerto (destacado em vermelho na imagem acima) está em construção e foi dividida em três partes para atender as máximas dimensões da impressora 3D.
A primeira parte é onde o servomotor é conectado. Ela foi impressa em 3D em PLA e o servomotor SG90 foi montado utilizando-se parafusos e porcas.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.