 igorfonseca83
igorfonseca83Five LED arrays were attached to the robot 's face in an acrylic sheet, and mounted on the body. Four servomotors were installed on his shoulders for the movements of the arms. Circuits were mounted on the robot 's chest for easy access. The skeleton was useful for testing the movements and to give an idea of the overall dimensions of the robot. However, the material used (2mm acrylic) is considerably light and malleable, resulting in unwanted vibration and instability of the structure.
The structure is being adapted to use harder laser cutted materials.
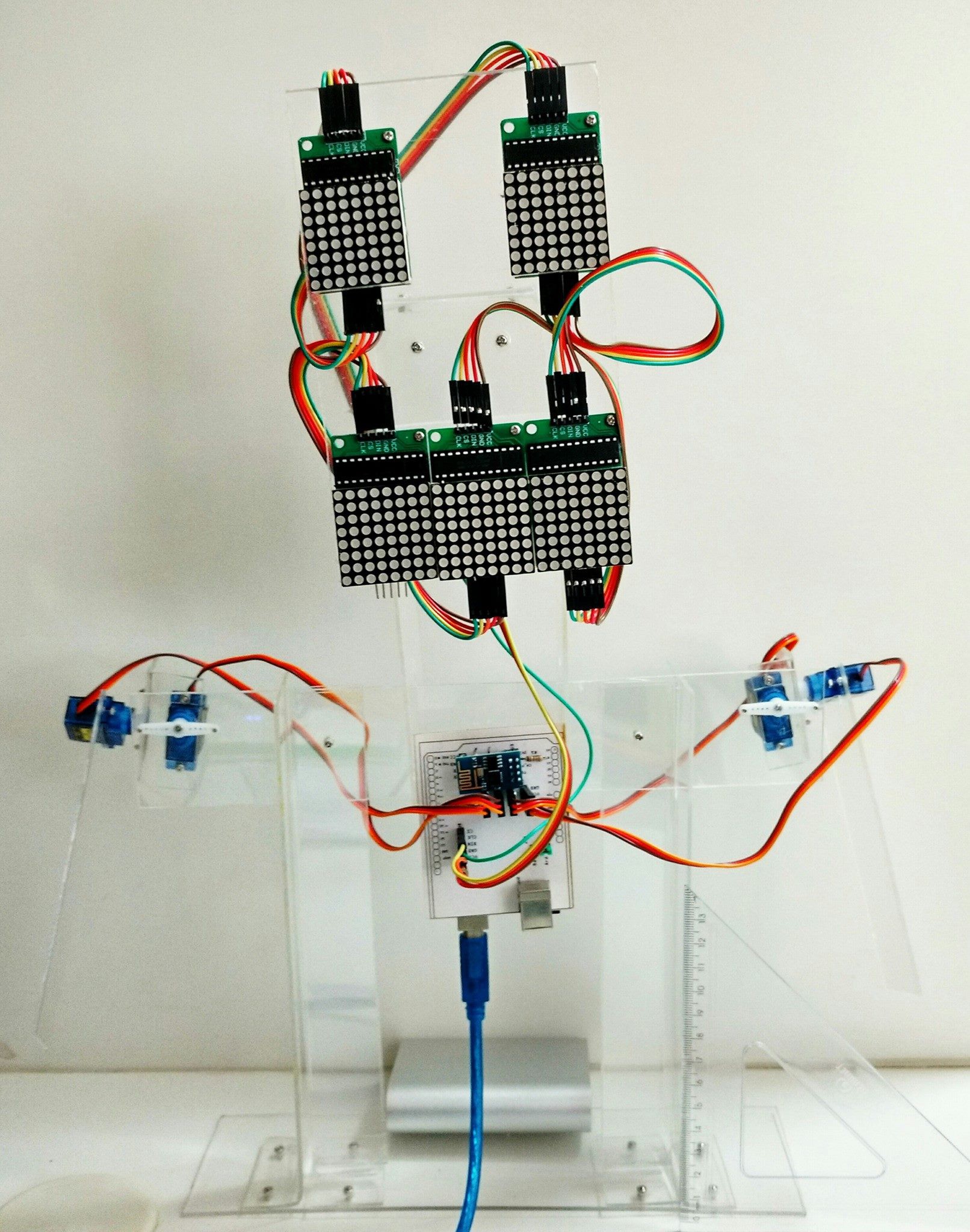
Cinco matrizes de LED foram fixadas ao rosto de robô em uma folha de acrílico, e montado no corpo . Quatro servomotores foram instalados nos ombros para os movimentos dos braços . Circuitos foram montados sobre o peito do robô para fácil acesso .
O esqueleto foi útil para teste dos movimentos e para dar uma ideia das dimensões gerais do robô. Entretanto, o material utilizado (acrílico de 2mm) é consideravelmente leve e maleável, resultando em vibrações não desejadas e instabilidade da estrutura.
A estrutura está sendo adaptada para utilização de materiais mais rígidos cortados a laser.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.