Bodo Hoenen
Bodo Hoenen-
3D design software
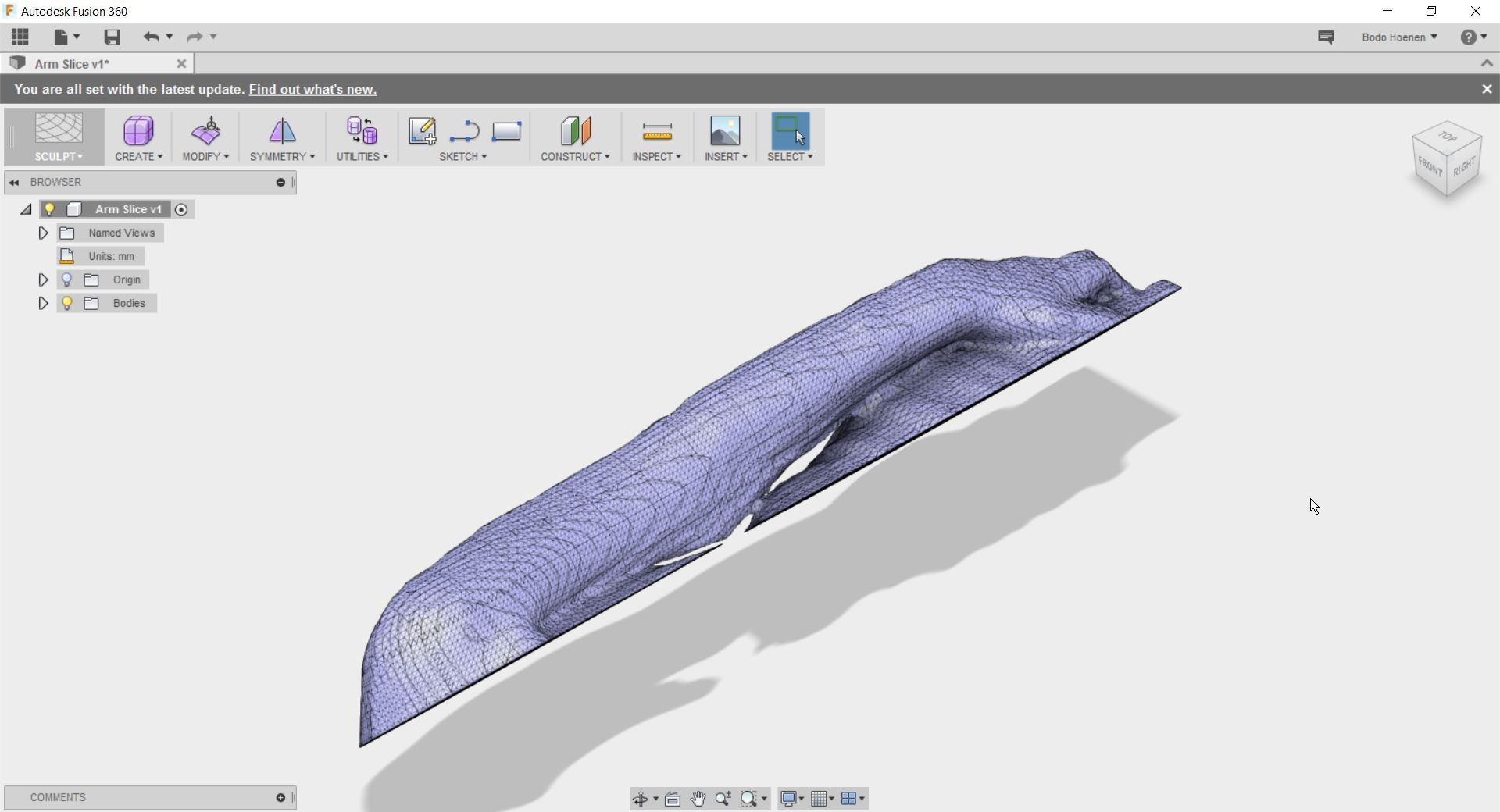
09/30/2016 at 15:40 • 0 commentsTo keep things super light we are designing a 3D printed brace to fit my daughters arm. We used the Kinect and 3d Scan on windows to create a scan of her arm. here is what we have done so far.
now we need to add to this our joint and actuator design.
![]()
-
Testing New Actuator
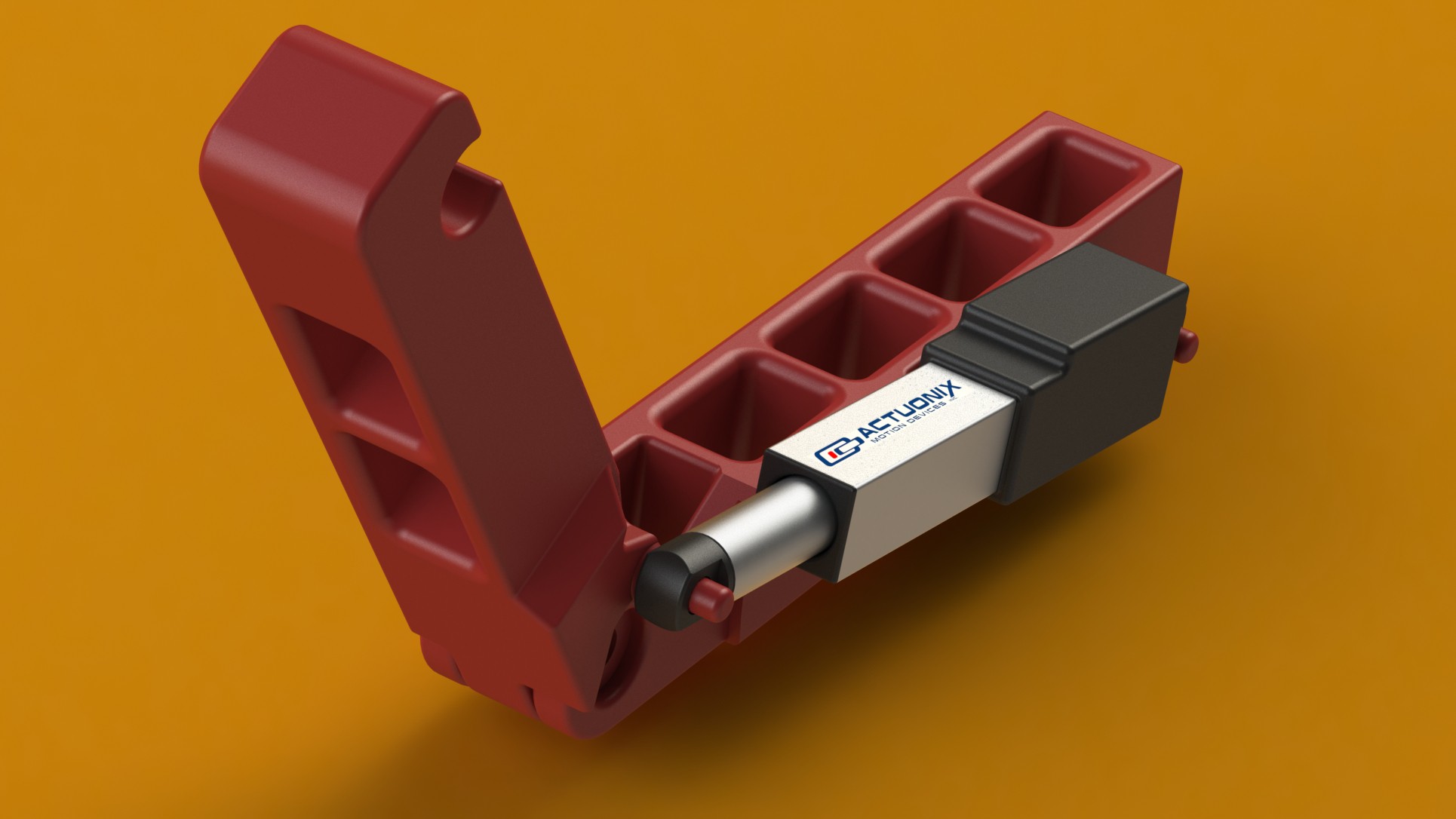
09/21/2016 at 17:36 • 0 commentsWe are testing out the new actuator today, sponsored to us by Actuonix. This is the L16 63:1 ratio with a 50mm stroke. It has double the torque, increases the speed and only adds a few grams of weight compared to the previous version we tested with. I needed to adjust the prototype a little and we will need to do some more work on it.
![Testing new actuator from Actuonix]()
Have EXP in 3d software? please help!
In addition, we are continuing to work on the 3D files that we generated by using the Kinect and Microsoft 3D Builder. If someone has exp on how to use those files within F360, solidworks or another application, please reach out. I am struggling to figure out how to clean up the 3d file, remove detail we dont need and then to use that to design a fitted cast around my daughter's arm.
![]()
-
Update Video 5: Building a robotic prosthetic arm
09/08/2016 at 14:09 • 0 commentsUpdate: September 5
Building a few prototypes and scanning Lorelei's arm to make the perfect fit for the prosthetic.
-
Battery endurance testing
09/08/2016 at 14:07 • 0 commentsUpdate: September 2nd
We set up the arm rig to stress test some batteries. Great news! we may be able to rely on some pretty light and small batteries!
With the goal of keeping the prosthetic robotic arm as light as possible, we intend to use the lightest possible battery that can give us reasonable usage. For reasonable usage, we noted how many times on average Lorelei pulls her arm up and down in a school environment. Given she is a righty and her left arm is the paralyzed one, it's about once every 2 minutes. We also discussed and suggested that changing a battery once at school would be fine, this means we could split the weight of the battery between two and make sure the swapping of batteries is easy. We intend to keep the battery and Arduino off of the arm and on her belt or in her pocket, this means that changing it would be simple. The school day is about 6.5 hours, which means the battery would have to be able to power the actuator at full load for at least 98 cycles (expand/contract) (6.5 / 2 * 30). The prosthetic arm brace and actuator we intend to keep to below 150g, which should be light enough for my daughter's shoulder to support (We may get a shoulder brace for additional support). 150g is a 10x reduction in weight compared to what's readily available. My daughter's forearm weighs about 300g. So with all of those measurements, we set up a test. We set up the arm rig to pick up and drop down a 500g weight (300g for arm + 150g for prosthetic + 50g that we loose due to the joint setup and possible friction). This was the results
Test 1: A 6-volt battery, 3300 mAh, weighing 270g - completed 250 cycles, and through a crude measuring approach I estimate it was still about 70% capacity! This means it could easily last the whole day.
Test 2: A 6-volt battery, 2000 mAh, weighing 143g - completed 250 cycles, and through a crude measuring approach I estimate it was still about 40% capacity! This means it could also last the whole day
What's going to happen next: I'll be getting an actuator with more torque from Actuonix Motion Devices Inc. it will require a little more juice and so I will re-do these tests then. I also intend to get an additional battery, a 7.4 volt, and depending on how the tests go I may get a 2000 mAh or less.
![Battery endurance video]()
See project page here: Project Page
-
Update Video 4: Building a robotic prosthetic arm
09/08/2016 at 14:03 • 0 commentsUpdate: August 29th
We have some great progress that has been made by a global group of amazing people. Actuonix Motion Devices Inc. (Canada) sponsored some actuators, James, Audrey (New York), Jose (Mexico) and Willie (South Africa) have all been helping with code, electronics questions, engineering advice and a lot of general support.
-
Actuonix Motion Devices Inc. sponsors actuators
09/08/2016 at 14:01 • 0 commentsUpdate - August 15th
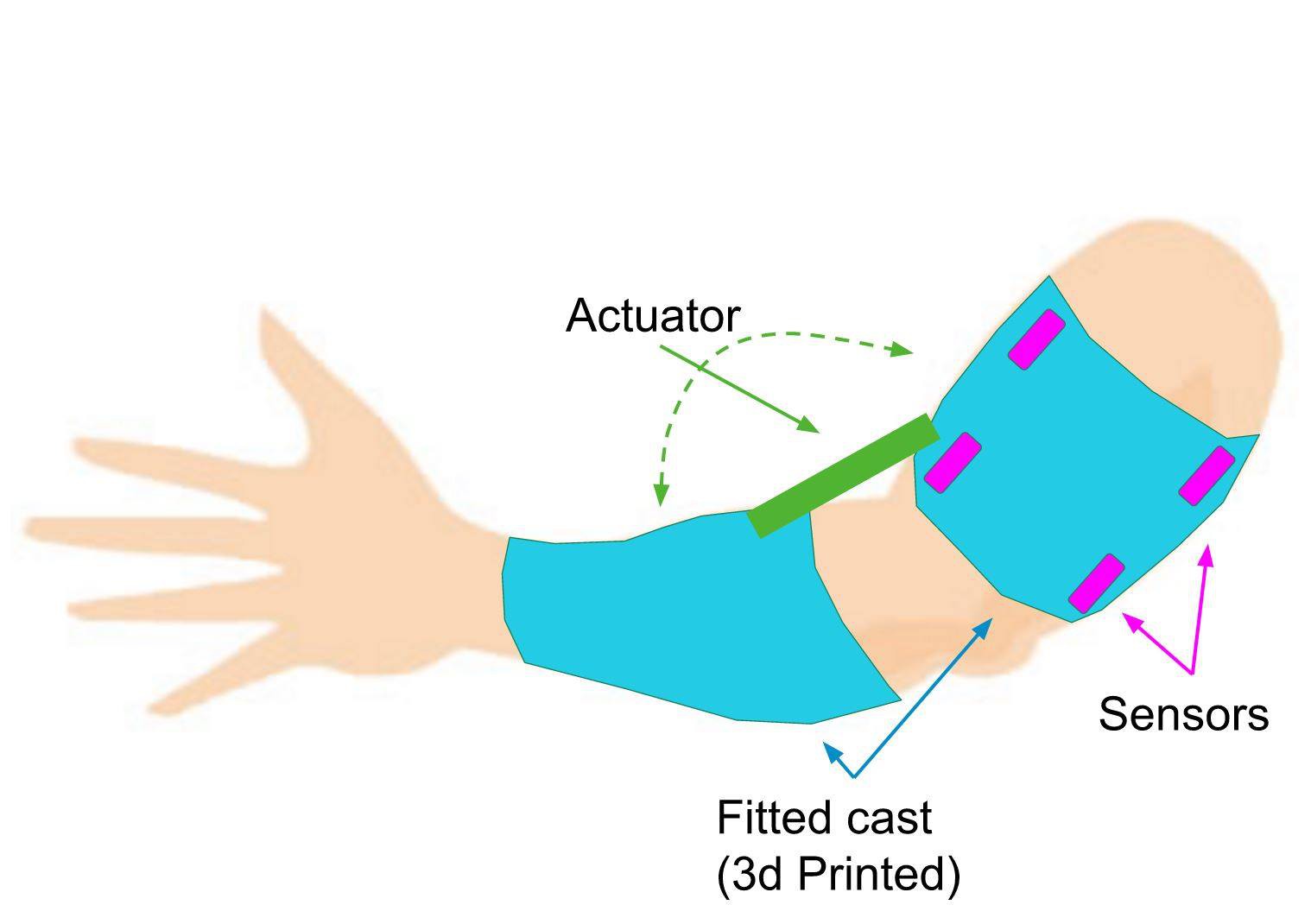
Awesome news, Ian from Actuonix Motion Devices Inc. has kindly offered to sponsor the actuators needed for this project. I'm now thinking about the mechanics of the solution so that we can order the most appropriate versions. James Chin and Audrey Lee have kindly been helping and their engineering experience is really helpful here. Here are the measurements for my daughters' arm and a rough sketch of the current thinking for our first prototype. I am concerned about the stroke length of the actuators and the torque required. Design points: I'm trying to keep this as light and simple as possible. If at all possible I don't want to build a joint due to weight and complexity. Also, the goal here is to help encourage her to use her muscles as much as possible, I don't want this to become a crutch but rather an assistive device to help in her rehabilitation. this is why I prefer the single actuator solution to the dual actuator solution. I am encouraged by recent research showing that such exoskeleton devices that use sensors and encourage the use of muscles have rehabilitated some paralyzed individuals.
![]()
-
Update Video 3: Building a robotic prosthetic arm
09/08/2016 at 13:56 • 0 commentsUpdate: August 13th
Building an Assistive Robotic Arm
We are building an assistive robotic arm for my daughter who recently became paralyzed in her left arm.