Rohit Bhaskar
Rohit Bhaskar-
Final testing of 2nd prototype
10/02/2016 at 08:03 • 0 commentsAfter we had painted the modules individually, we joined them along with the emg circuit to detect muscle twitching. We also combined the complete pneumatic system for testing it.
The 2nd prototype being tested by 1 of our members.
![]()
-
Working with EMG (Electromyography)
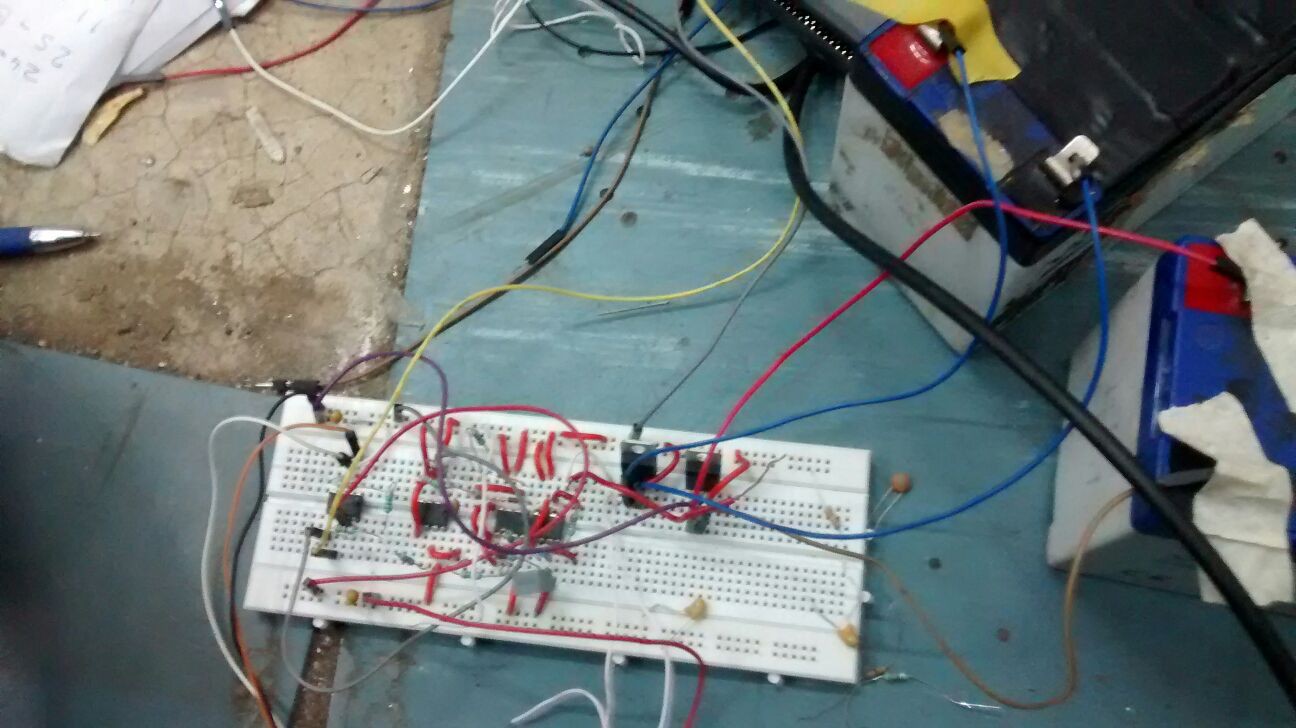
10/02/2016 at 05:23 • 0 commentsWe designed an amplifier and filter circuit for EMG. EMG is electromyography. We used EMG to detect the twitching of muscles so that the exoskeleton's pneumatic pistons can be controlled on the basis of which joint the user wants to move.
The EMG circuit (for filtering and amplification)
![]()
-
Making and painting the 2nd prototype
10/01/2016 at 19:13 • 0 commentsWe improved upon the previous prototype and came up with our version 2. The upgrades included proper joint coupling, a newer frame, painting, padding for more comfort.
This prototype also has a bag behind to house the pneumatic valves and bottles for storing. The prototype is now ready for testing
![]()
-
1st prototype testing
08/26/2016 at 20:12 • 0 comments1st prototype testing. The initial prototype was made using basic materials and was tested directly with the air compressor connected. The prototyped worked and gave proof that many imprvements were possible
The 1st prototype consists of a hard coded motion of legs. Yet to test the EMG probes.
BipEx - Biped Exoskeleton
BipEx is an exoskeleton for the legs for fast recovery and rehabilitation of people who cant walk or are recovering from an accident.