 Robotic Arm&Hand
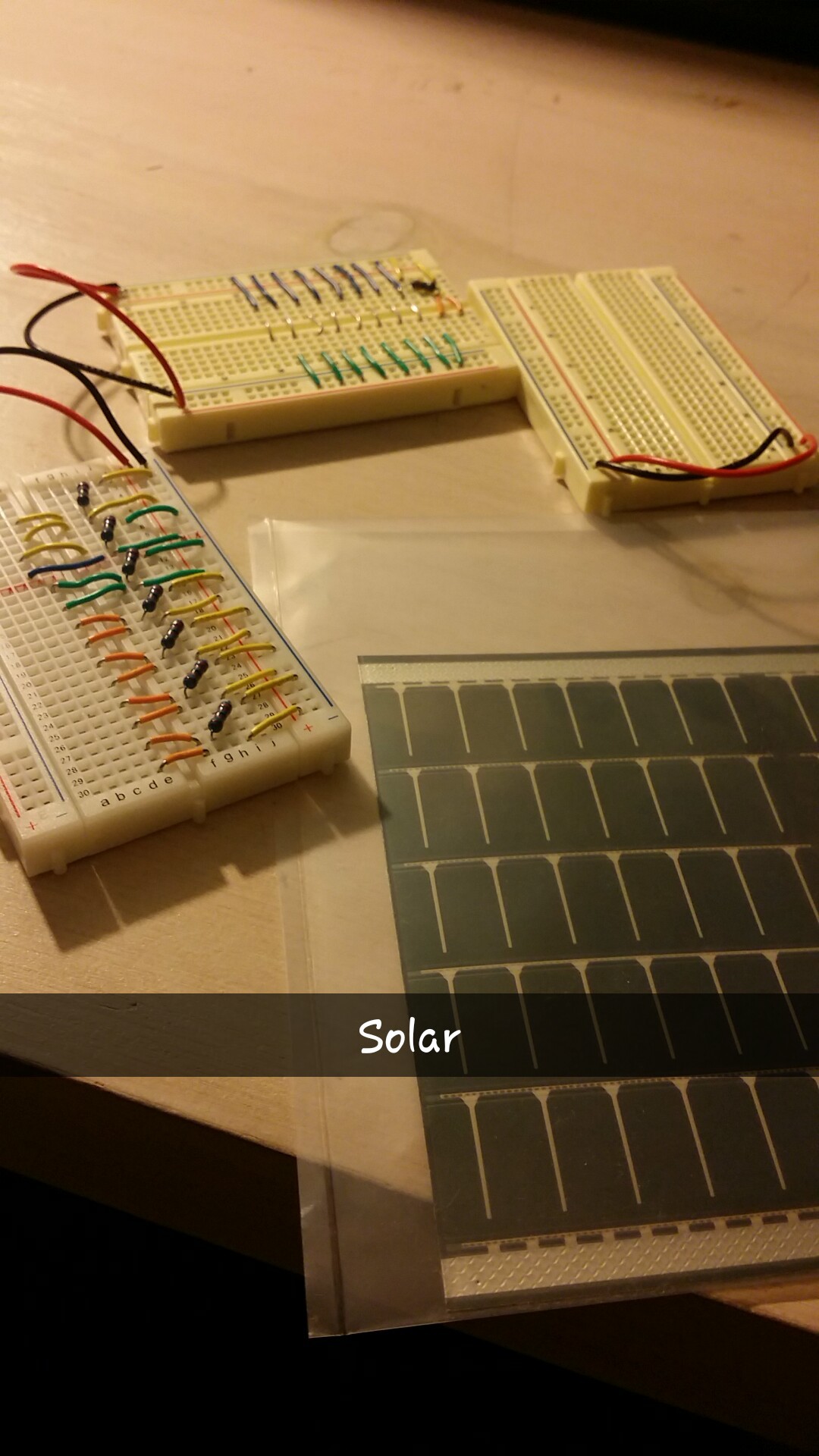
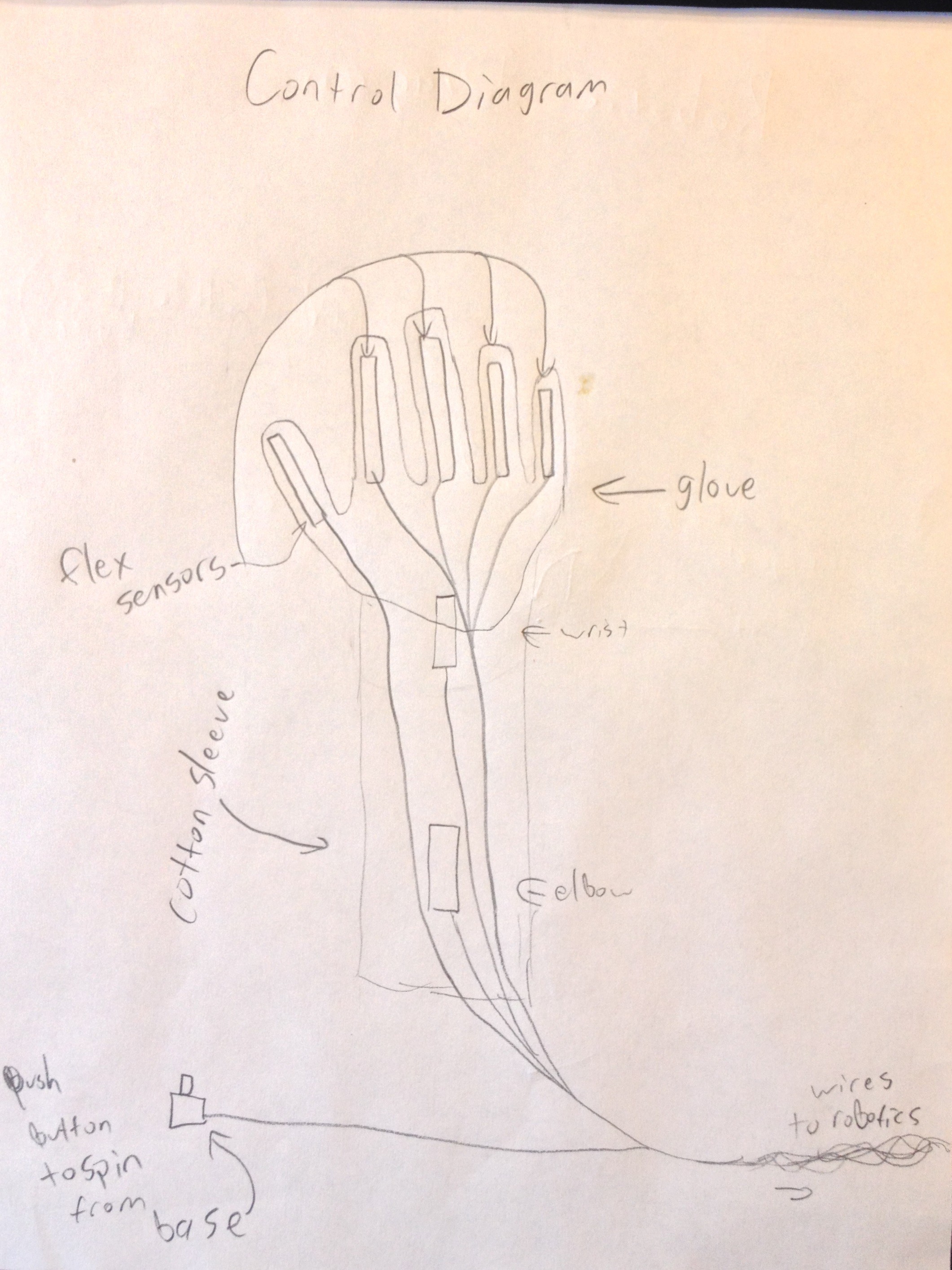
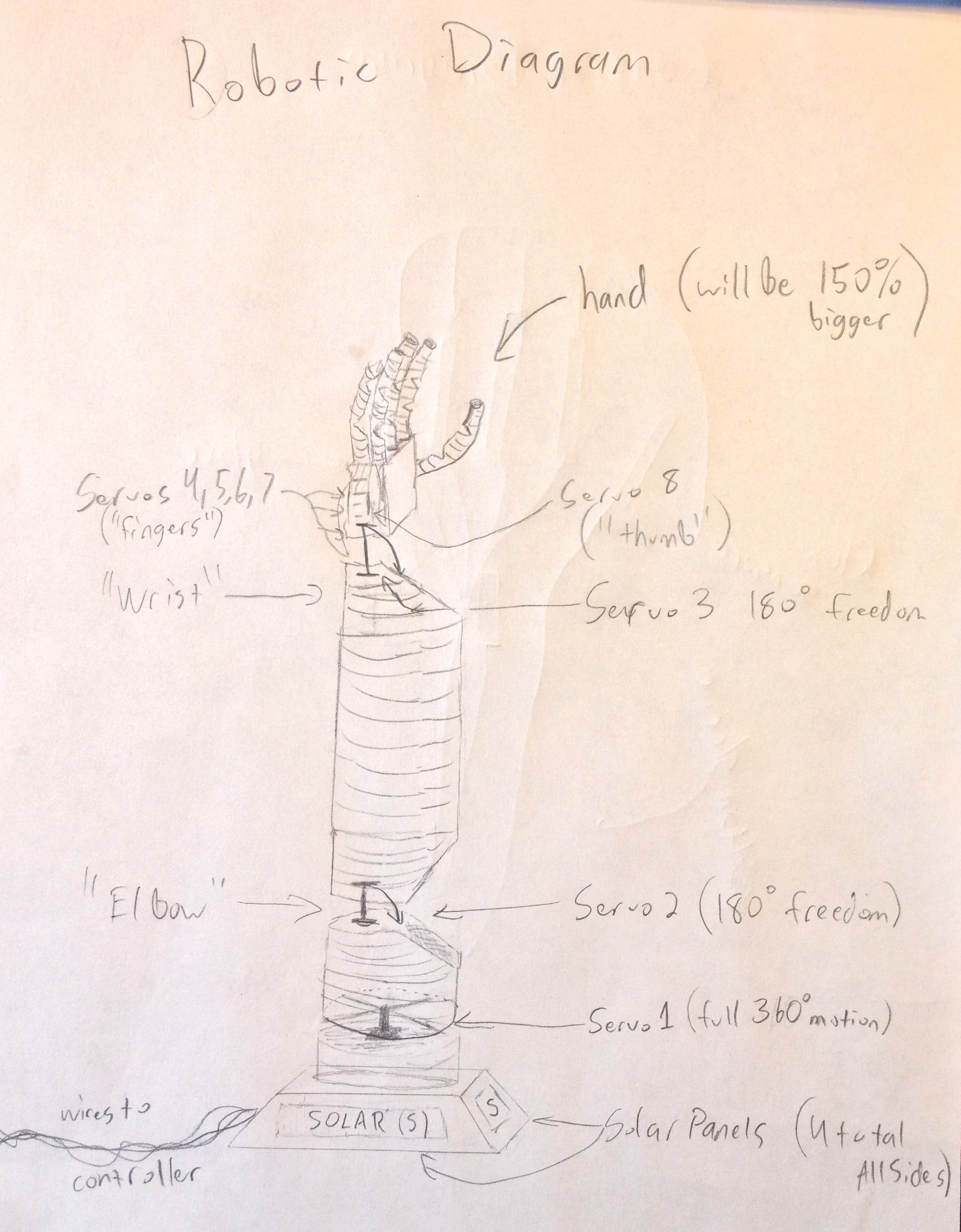
Robotic Arm&HandConstruction of a user controlled robotic hand and arm. There is going to be a switch to use the internal batteries, or a plug in port for our solar collectors, to save the batteries. The arm is going to be connected to a base to be set on a table or to be attached to a surface. The user will wear a sleeve and a glove that will have integrated flex sensors.
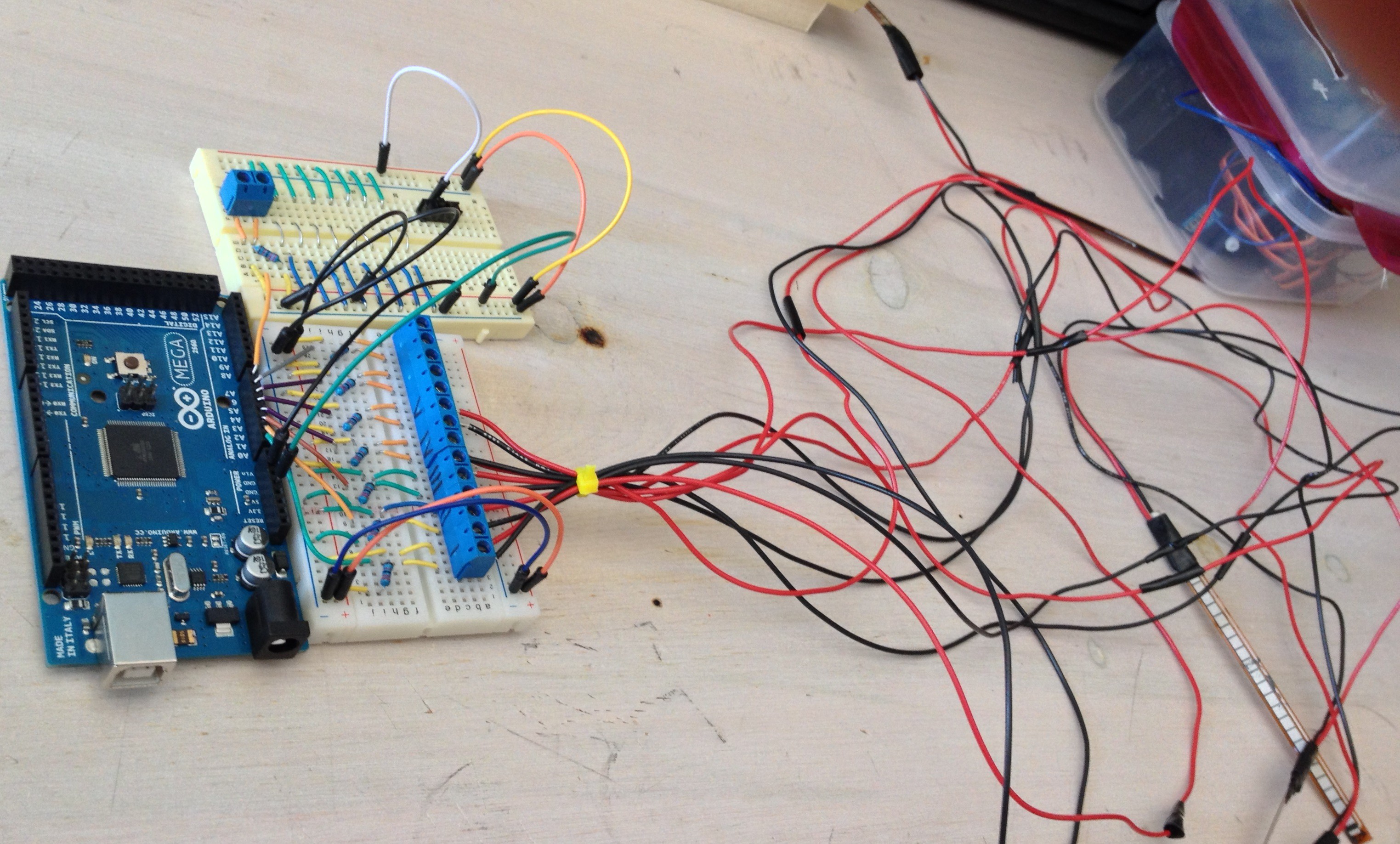
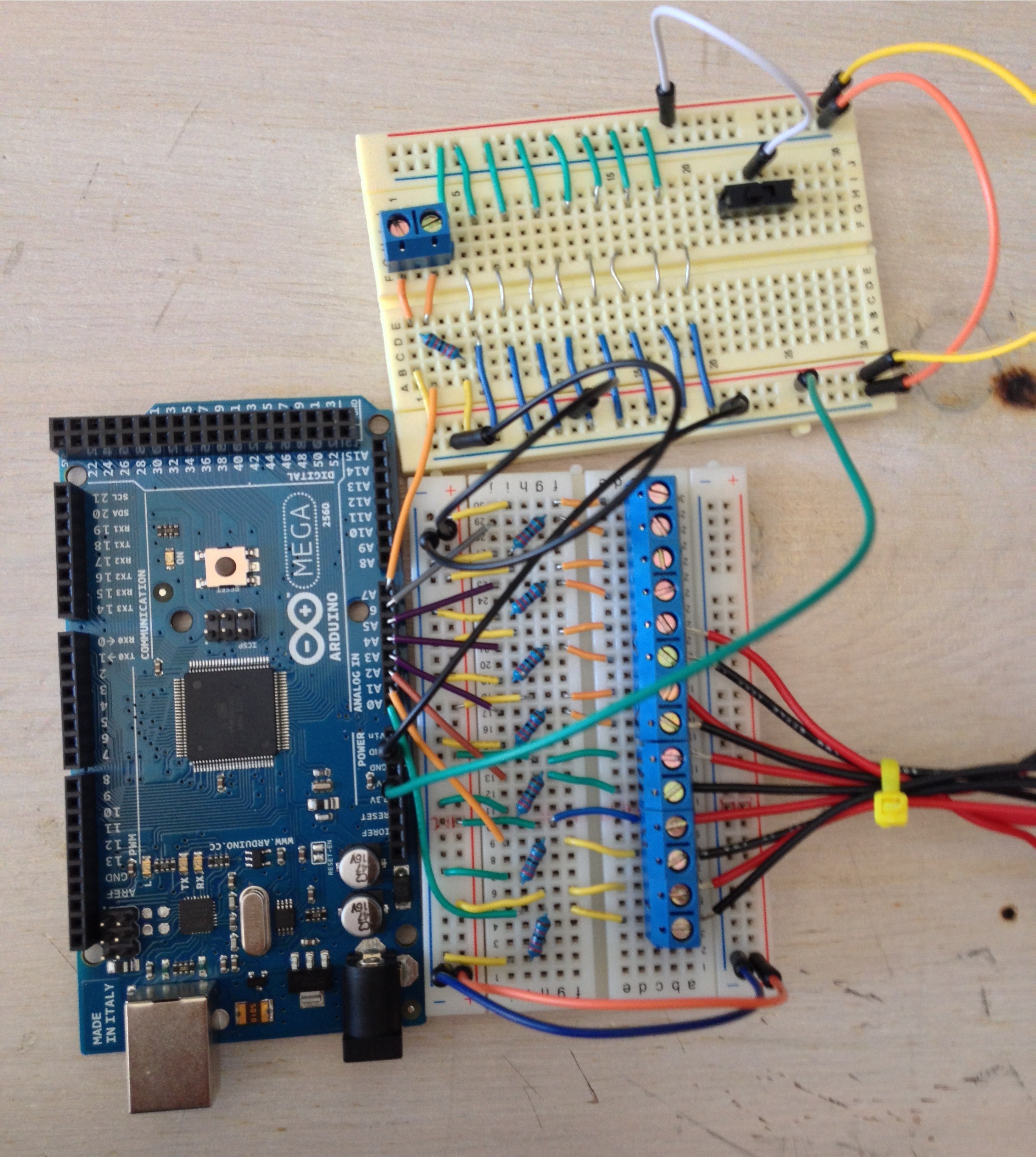
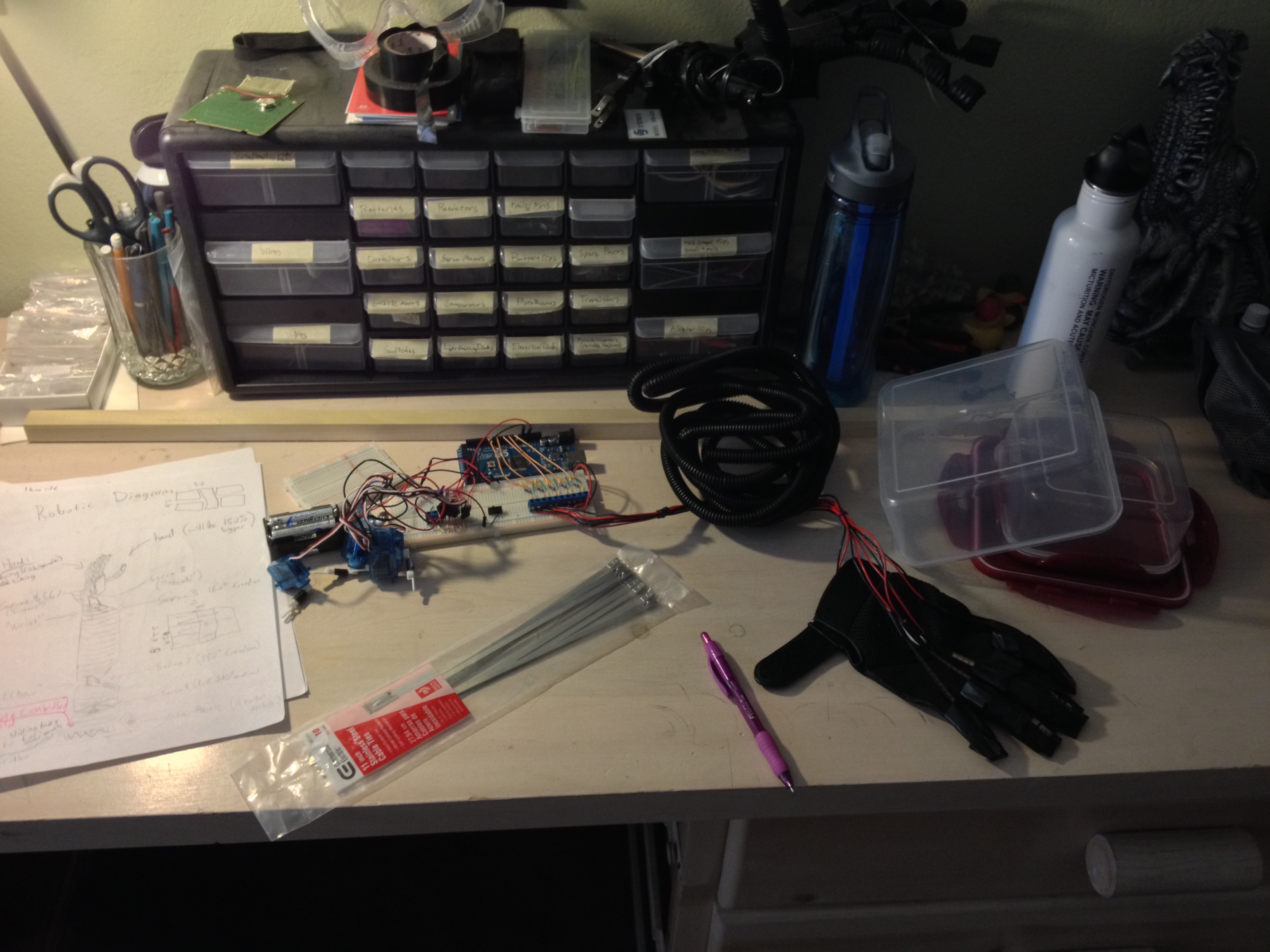
These resistance values will be read as analog inputs to be converted to digital outputs in the Arduino Microcontroller. The digital out puts will create a ratio of resistance to a degree angle value and turn the servo motors that distance. (All included in the source code)





 ProgressTH
ProgressTH
 engineerkid1
engineerkid1
 Adam Redfern
Adam Redfern
 amr.mostaafaa
amr.mostaafaa