Robotic Arm&Hand
Robotic Arm&Hand-
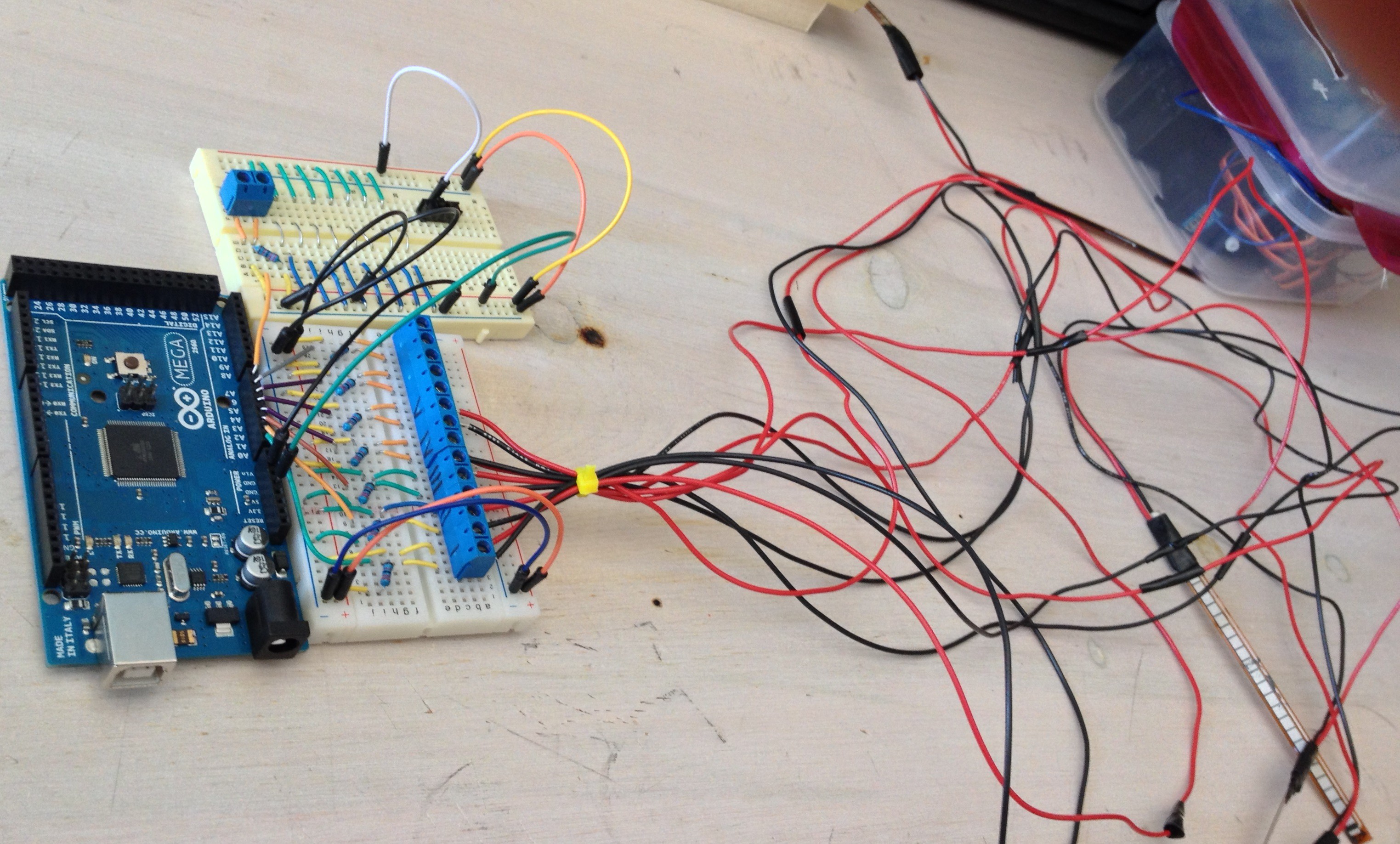
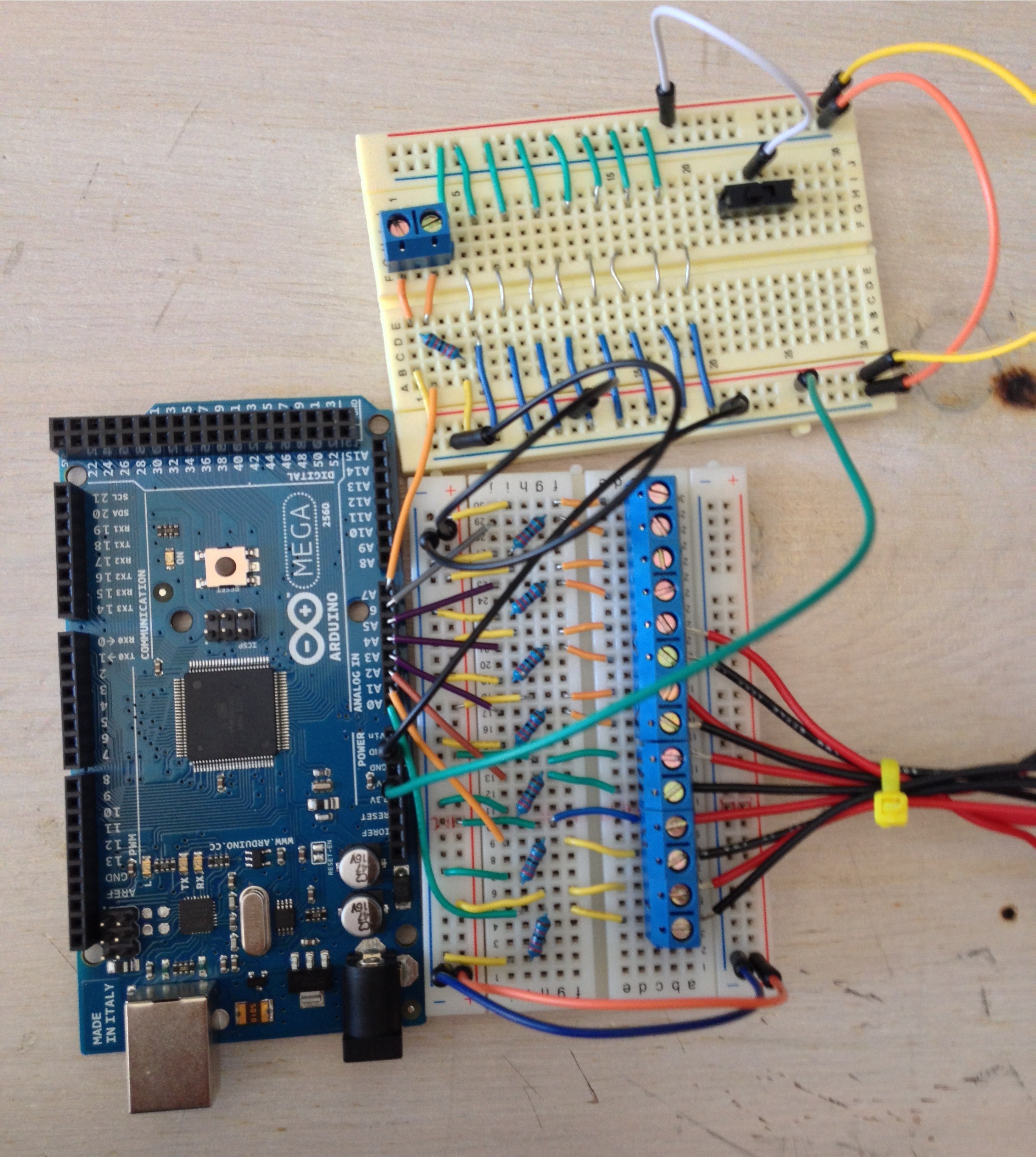
Circuit (Progress Cont'd)
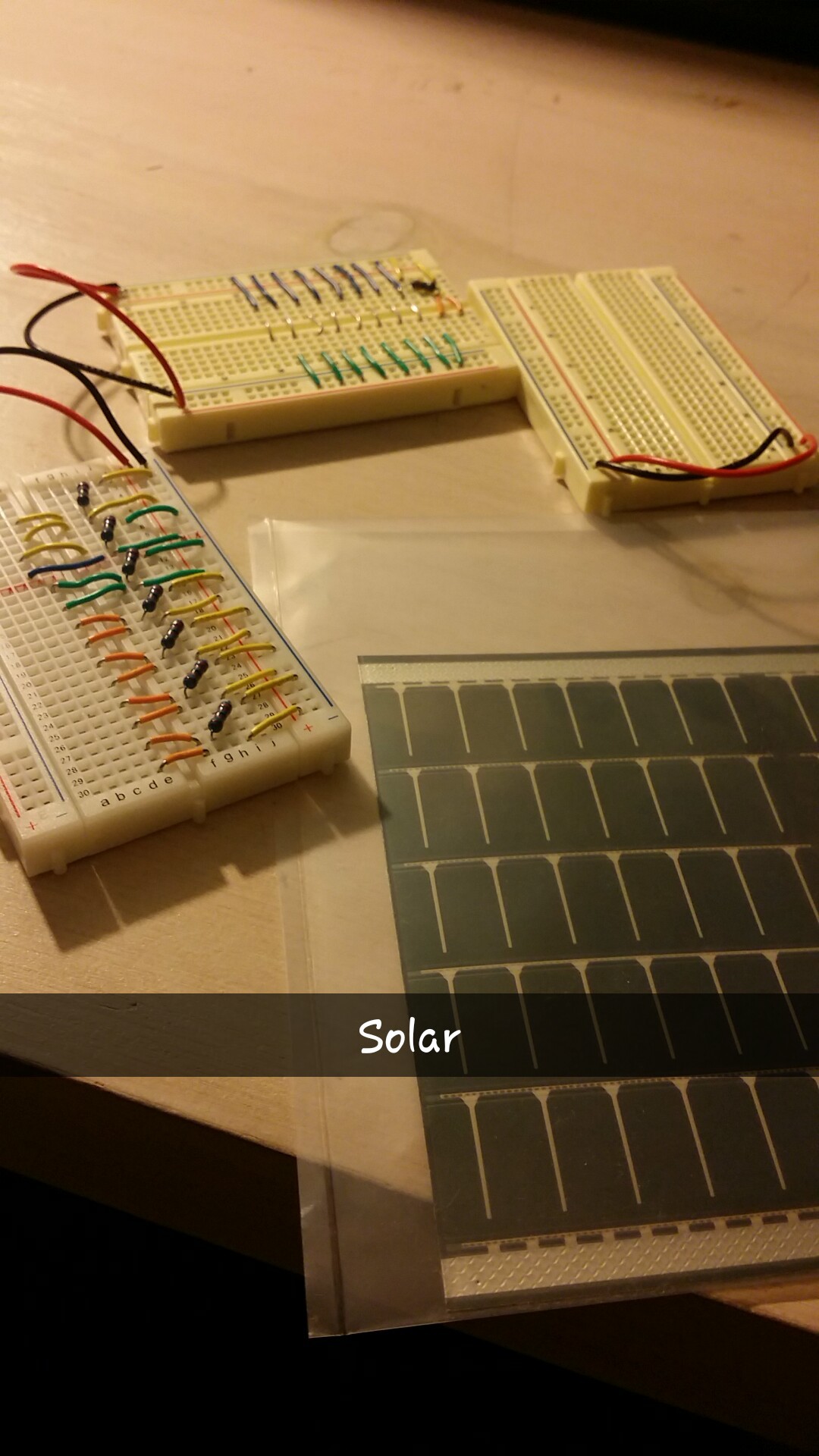
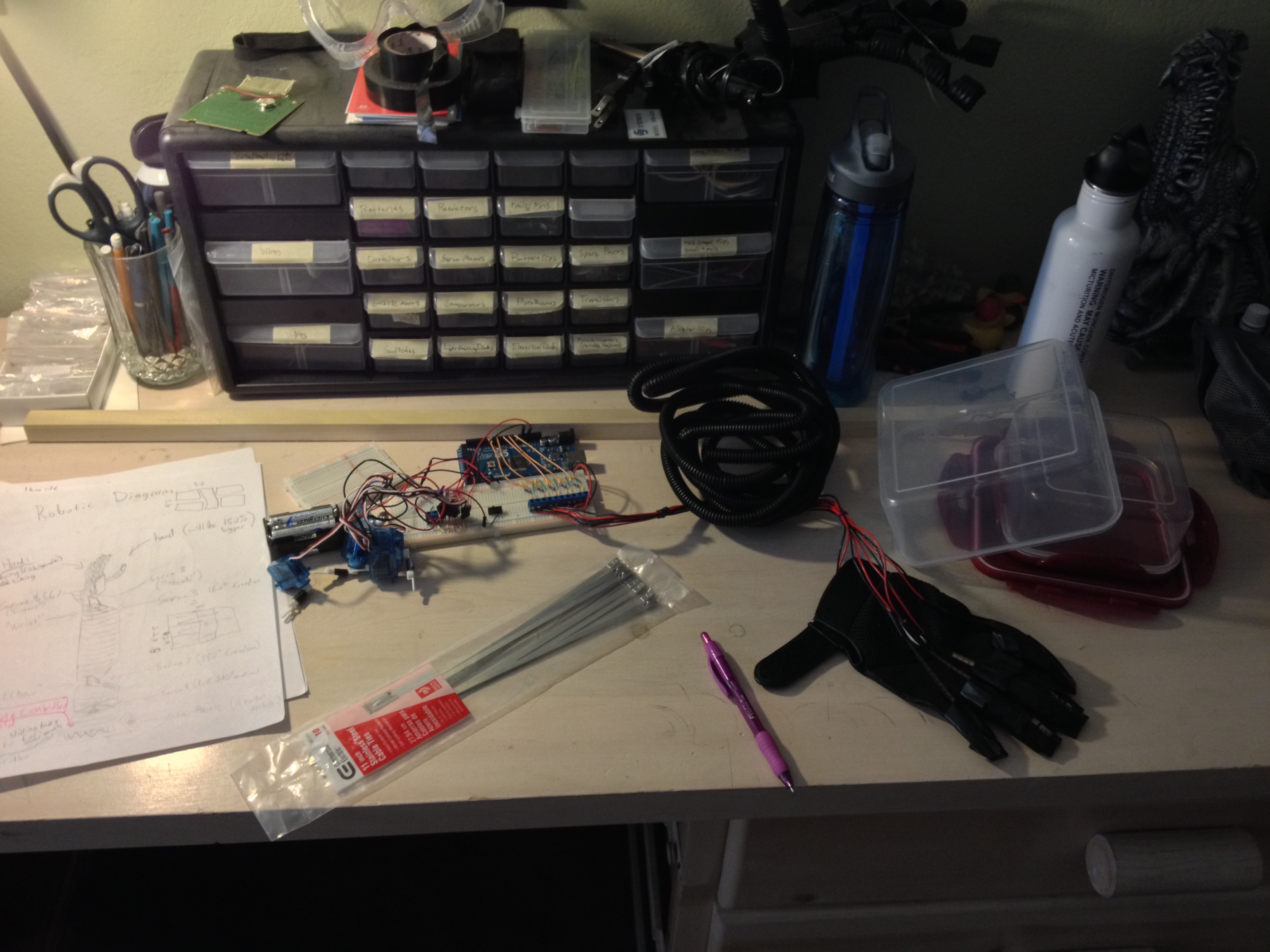
07/03/2014 at 22:07 • 0 commentsHappy Independence to all! Finally some free time from school and work. I was able to finish up most of the input connections to the Arduino, including the flex sensors necessary for the hand motors. All that is left is to contruct the animatronic hand to connect to the motors on the upper portion, put all the components together, and write the programming. I expect to be finished by this by the end of this month or August.
![]()
![]()
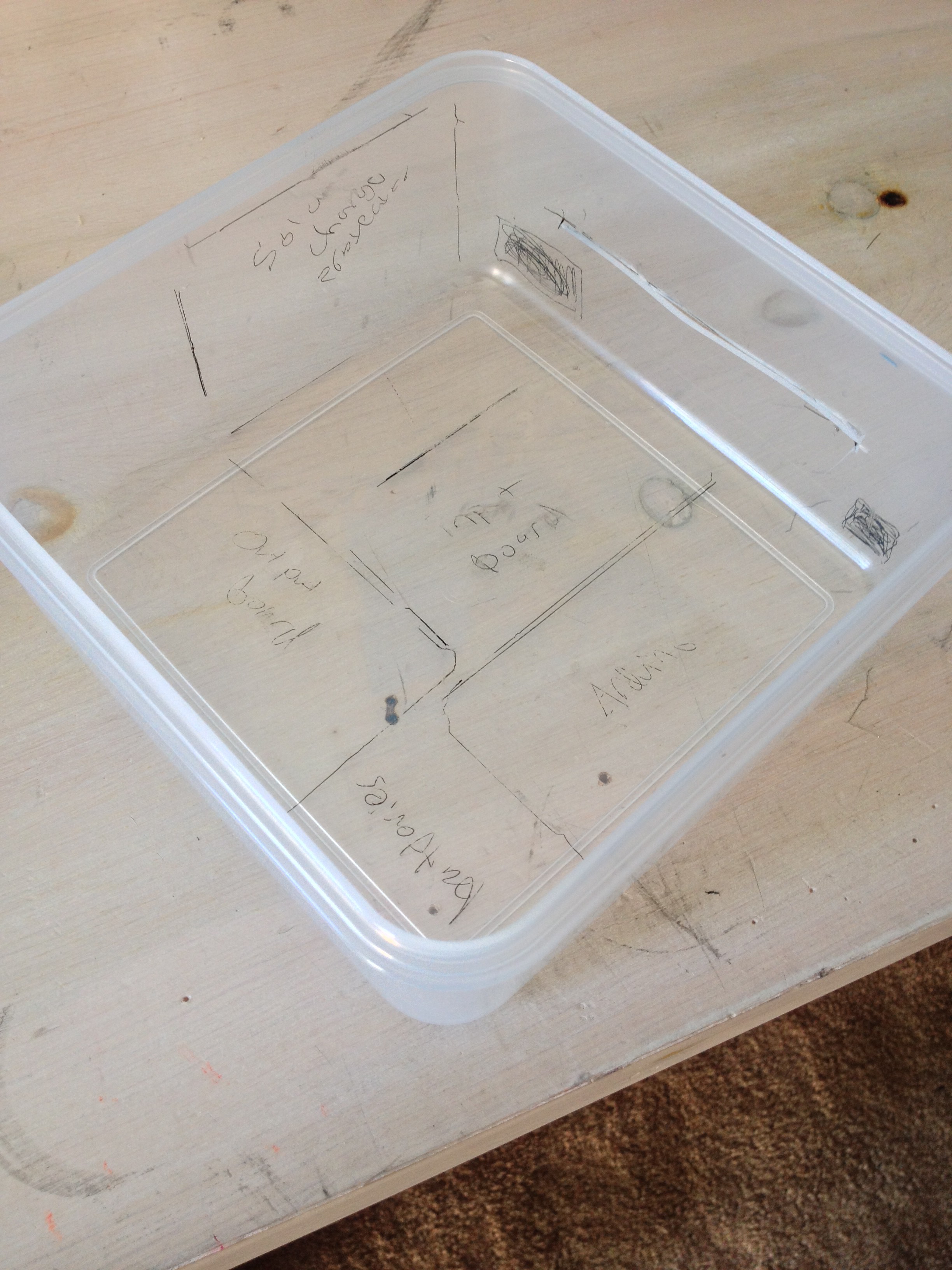
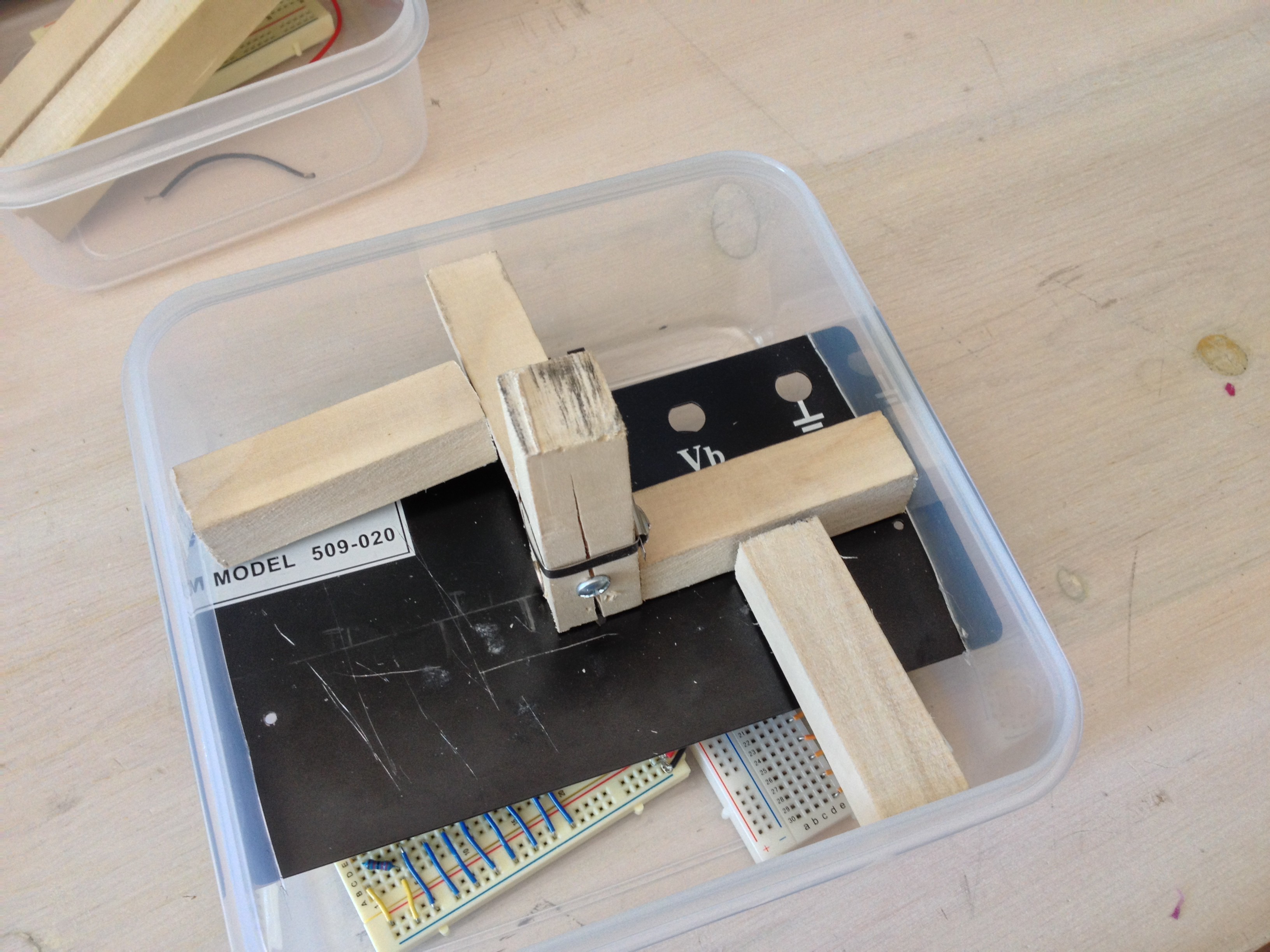
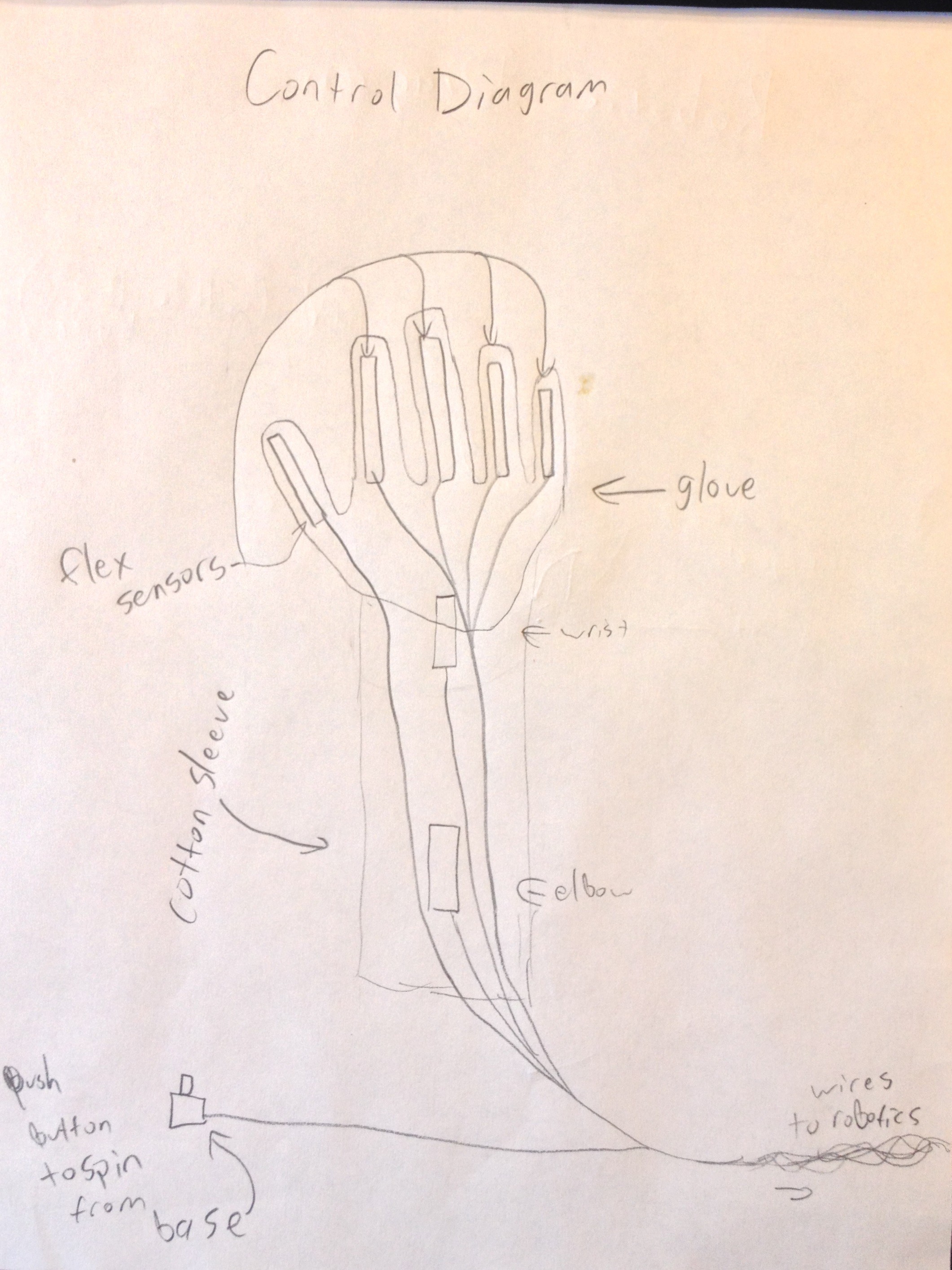
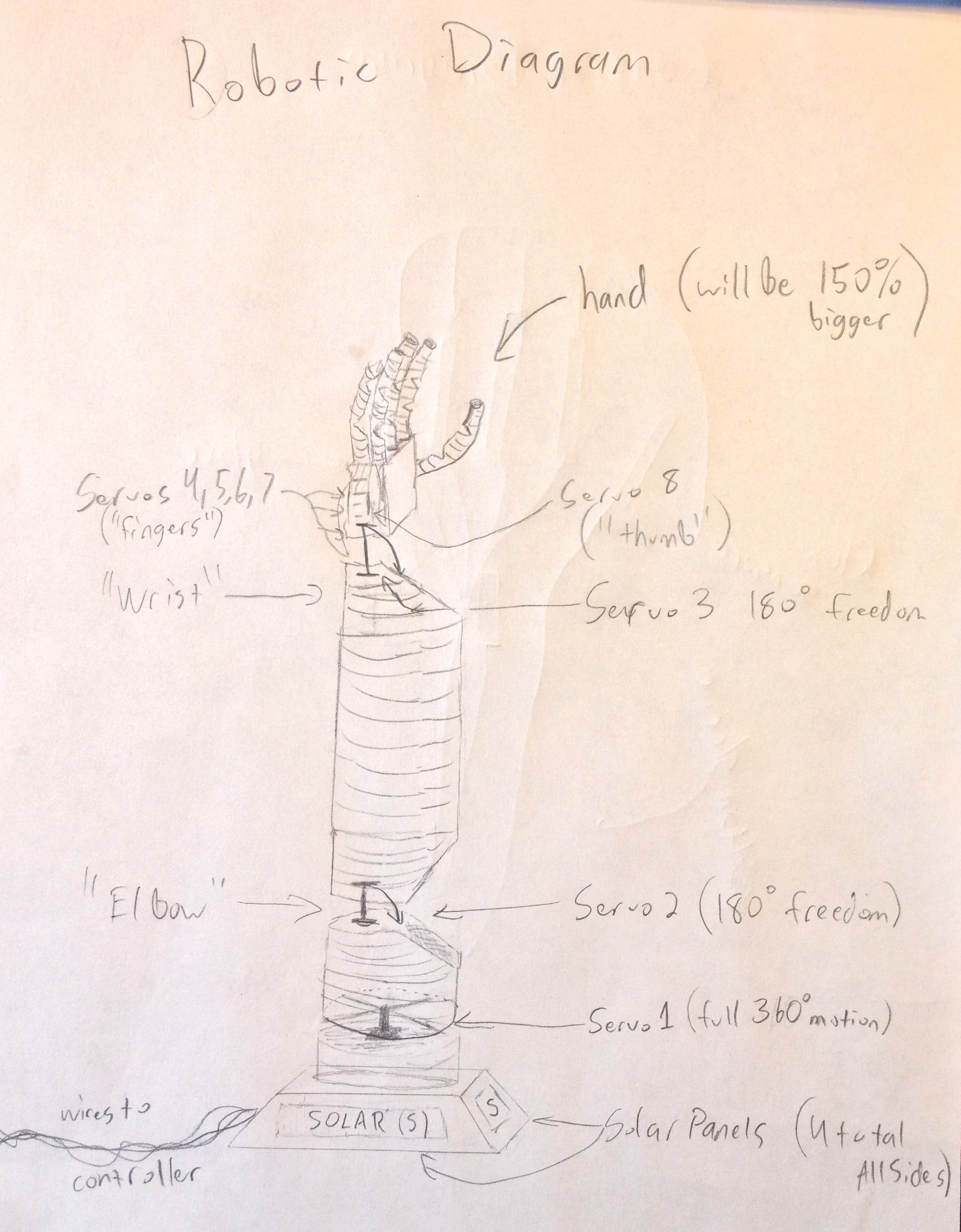
Also, I finished the technical drawing and construction of the major hardware for the base.
![]()
![]()
![]()
-
Progress!
06/30/2014 at 18:09 • 0 commentsAfter shuffling through my busy schedule, I was finally able to finish the circuits for input-output to the Arduino. Everything that I need has now arrived and I should be able to finish up the project this month. I am very ecstatic to see the results and hoping you are too. Solar films look good too.
![]()
-
Waiting and Waiting
06/19/2014 at 22:10 • 0 commentsThe parts are finally starting to come in! Which means starting today I will start wiring the boards and preparing the casings!
More detailed logs on the way.(Excitement unbounded)
![]()
-
Concept and Continuation Ideas
06/13/2014 at 06:06 • 0 commentsConcept Drawings!
I am probably the least talented artist that you will ever meet :P, but this is the best I could muster up.
I am planning on using biological inspiration in our design. We will be using small plastic pipes as the bones, wrapping them in wires such as veins, servo or step motors as joints, and then covering it all in a hollow cylinder tube as its protective layer (skin).
Anyways, I hope that description helps with viewing these "drawings". ;)
I will be ordering parts between 6/15-6/17, and beginning to build it during the same time with what supplies we do have. We are going to deconstruct our prototype a little bit, and tweak the programming a bit to be compatible with the larger scale project such as this one.
I will post regular updates every few days! So stay tuned for more!
I sincerely hope you enjoy viewing my work as much as I enjoy working. (Which is a LOT)
ENJOY! :D
![]()
![]()
-
Robotic Hand Prototype
06/13/2014 at 03:11 • 0 commentsI now have a fully working prototype for the hand! Now I will be expanding this project to an arm and a much more "finished look".
This is a great project as it can be applied to bionic implants for the handicapped, controls in hostile environments, and many other robotics applications.
FIRST PROTOTYPE
![]()
I began by building a Robotic Hand by using an Arduino Mega and servo motors with movement freedom of 180 degrees. Using an Arduino, I was able operate servo motors that responded to resistance change measured from a flex resistor imbedded in a glove. The servo motors would turn a specified distance based on the amount of resistance the flex resistor gave off, which in turn pulls on a series of strings connected to our animatronic hand. Then each servo motor pulls on one of five strings for each of the five fingers in the animatronic hand.
Main Materials:
{1} Arduino MEGA 2560 X 1
{2} Flexible Variable Resistors X 5
{3} 22k ohm Resistors X 5
{4} 22 AWG Wire X 1 Roll
{5} Servo Motors X 5
{6} Bread Board (840 point) X 1
{7} 4.8v Voltage Source (4xAA battery holder
Other:
- 1)Glove
- 2)Fishing Wire
PROTOTYPE SCHEMATIC AND ARDUINO CODE
![]()
#include <Servo.h>
Servo thumb;
Servo index;
Servo middle;
Servo ring;
Servo pinkey; // create servo object to control a servo
int flexPinkey = A0;
int flexRing = A2;
int flexMiddle = A4;
int flexIndex = A6;
int flexThumb = A8; //Sets positions for flex sensors (potentiometers)
int valPinkey;
int valRing;
int valMiddle;
int valIndex;
int valThumb; // creates variables for amount of resistance
void setup()
{
pinkey.attach(28); //attaches servos! :D
ring.attach(30);
middle.attach(31);
index.attach(26);
thumb.attach(32);
}
void loop()
{
valPinkey = analogRead(flexPinkey); // reads the value of the potentiometer, scales it to use it with the
valPinkey = map(valPinkey, 0, 800, 0, 179); // servo(value between 0 and 180 degrees), sets ratio between values,
pinkey.write(valPinkey); // sets the servo position according to the ratioed/scaled values,
delay(15); // and waits for the servo to get there.
valRing = analogRead(flexRing);
valRing = map(valRing, 0,850, 0, 179);
ring.write(valRing);
delay(15);
valMiddle = analogRead(flexMiddle);
valMiddle = map(valMiddle, 0, 800, 0, 179);
middle.write(valMiddle);
delay(15);
valIndex = analogRead(flexIndex);
valIndex = map(valIndex, 0, 800, 0, 179);
index.write(valIndex);
delay(15);
valThumb = analogRead(flexThumb);
valThumb = map(valThumb, 0, 800, 0, 179);
thumb.write(valThumb);
delay(15);
}
Solar Powered Robotic Arm and Hand
To create a robotic arm and hand, controlled by a user input, and powered by a solar collector.