Laio Athos Nevar Fonseca
Laio Athos Nevar Fonseca-
The fail
10/30/2018 at 02:30 • 1 comment![]()
Yes! That's a good pic. But i have some problems on the voltage to the robot.
I used 12v but I make a mistake on the wiring. So, I didn't make the test.
In the next week I will try make a new test.
-
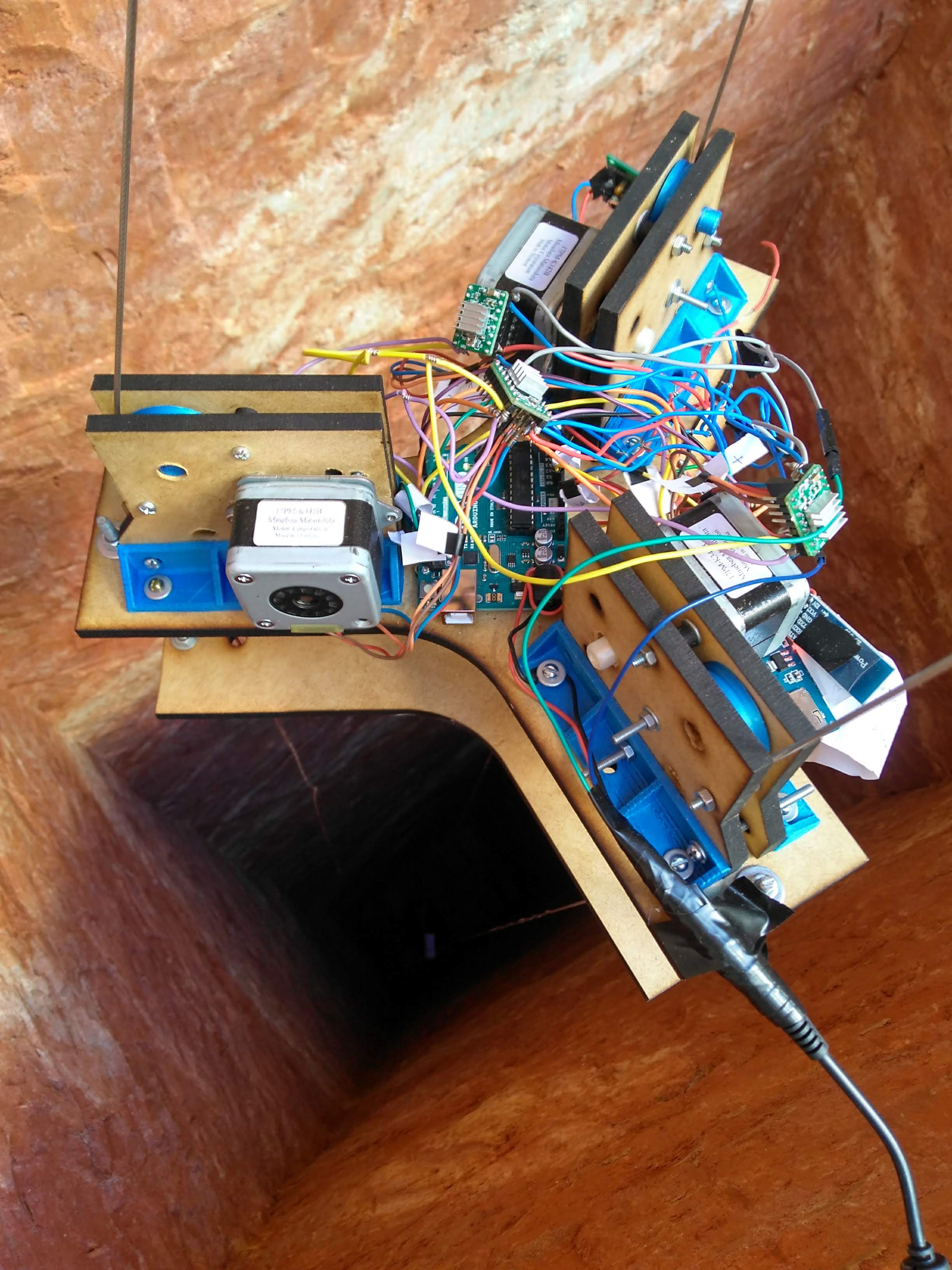
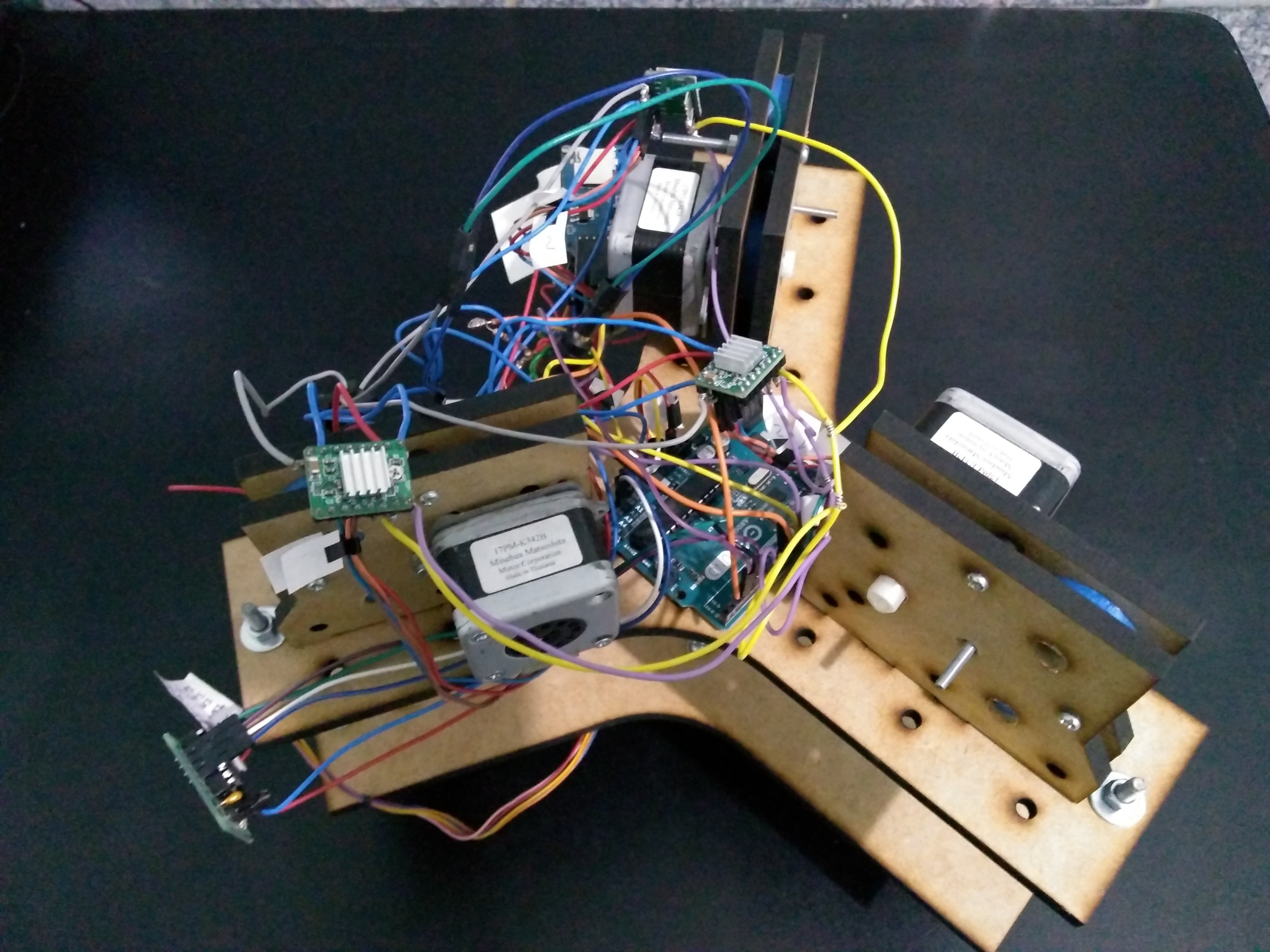
The assembly
10/15/2018 at 02:40 • 0 commentsHi!
A few days ago I started the assembly and now I'm close to get this project done and use it in a real situation
![]()
-
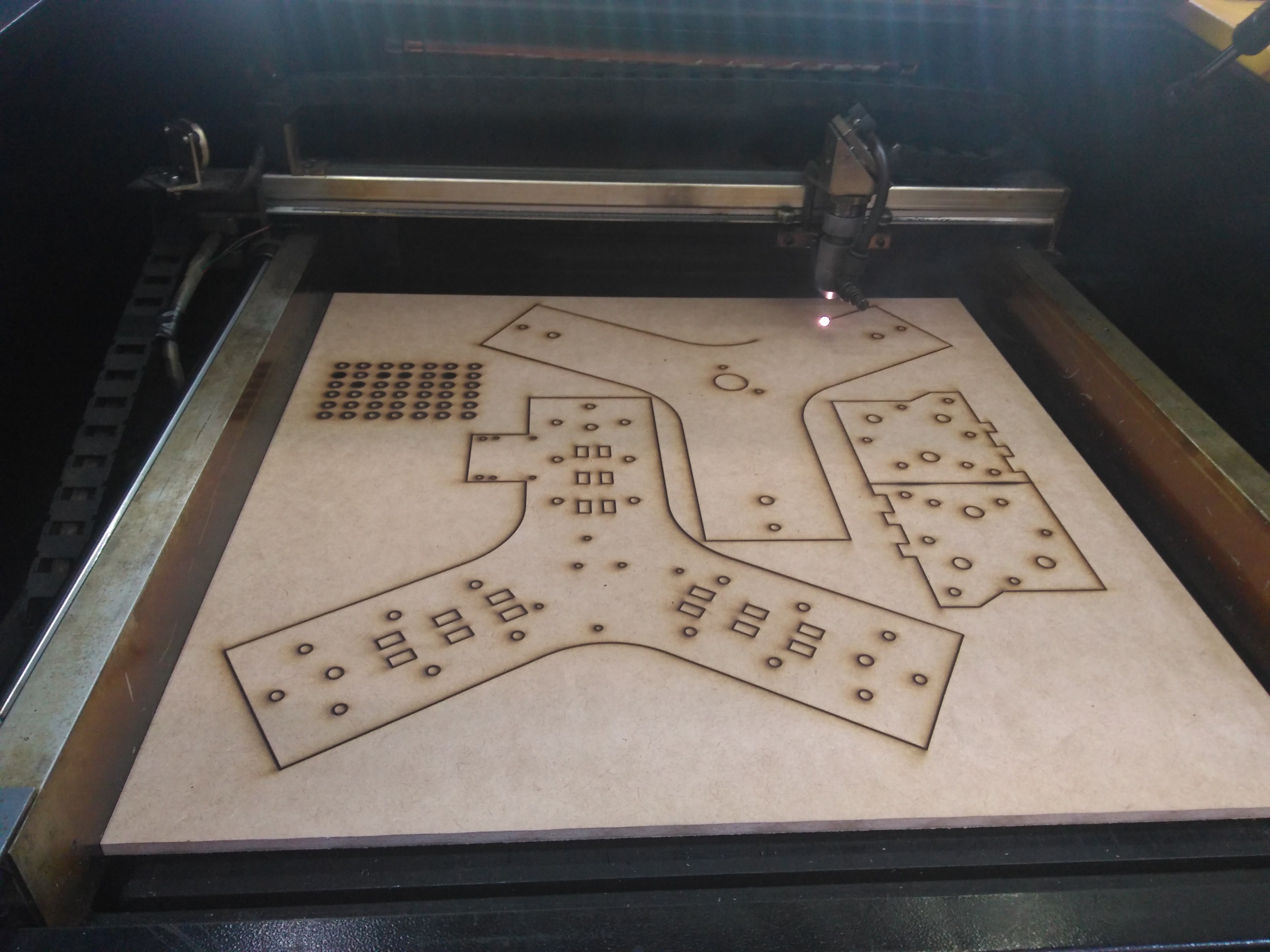
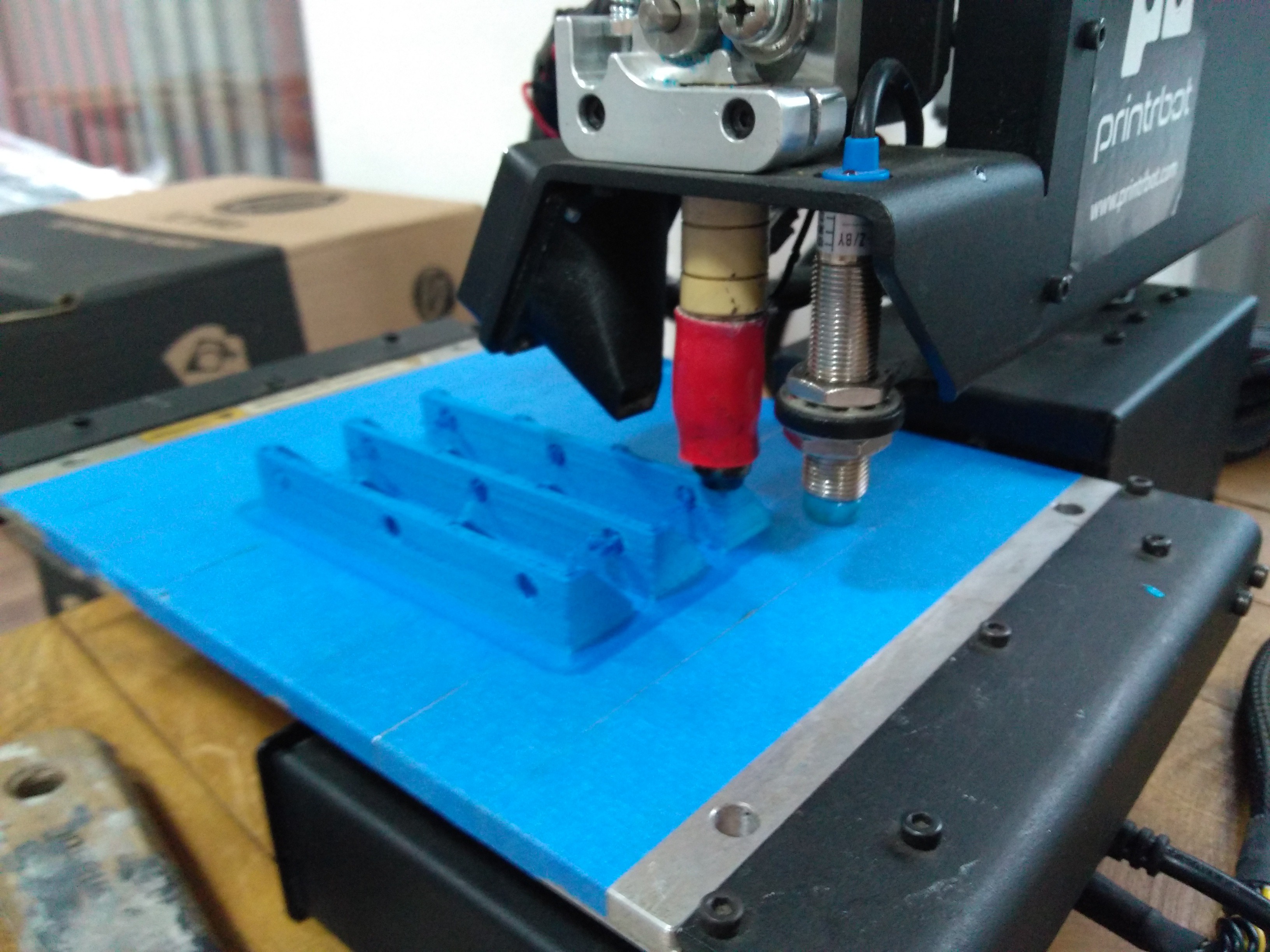
Turning real
09/26/2018 at 11:43 • 0 commentsHi!
This update is about the fabrication of the robot's parts.
![]()
![]()
So, that's all.
-
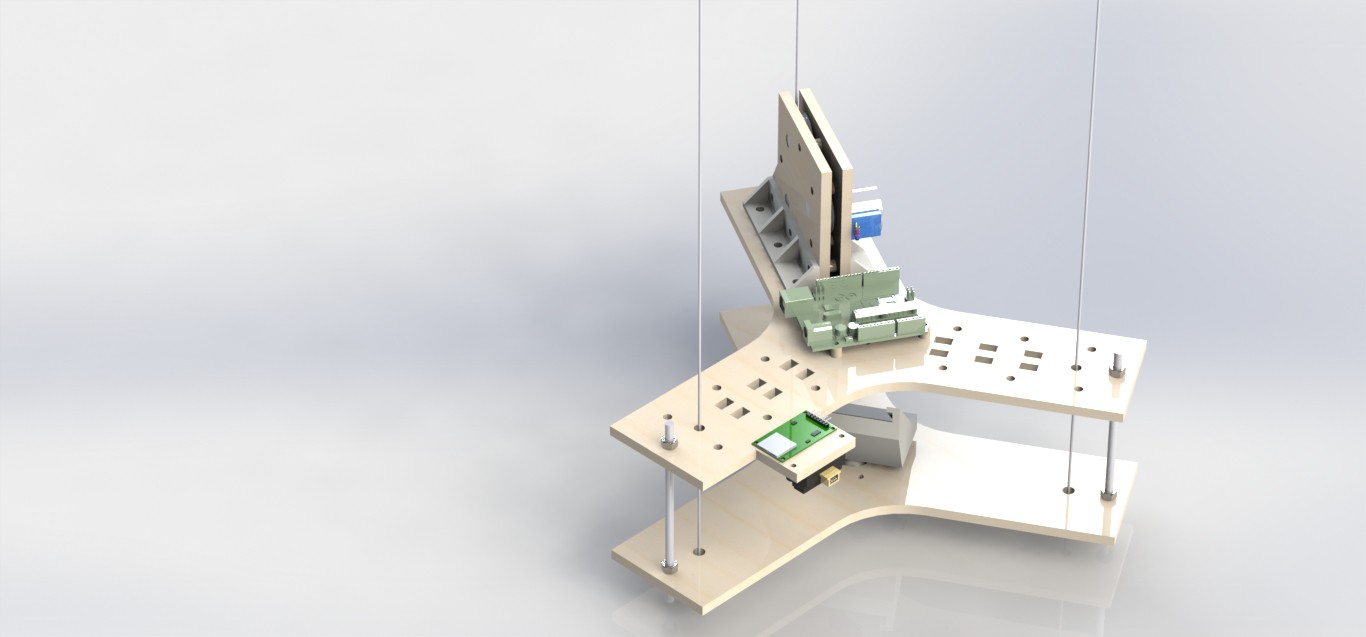
New design
09/10/2018 at 02:17 • 0 commentsToday I finished the new design of the prototype.
I revised the design to simplify the fabrication. The fabrication is scheduled to this week.
![]()
-
The VL53L0X test
08/28/2018 at 02:37 • 0 commentsThat's a lesson learned about the first sensor(sharp). I need to test the application of the sensor and verify if it works.
To do this, I built a paper box with known dimensions and placed the sensor on the center of the box.
![]()
That's not beautiful but runs well.
![]()
I built a mirror support and rotated the mirror around the axis sensor. And now it's fine. 360° covered by the sensor.
![]()
-
Updates
08/26/2018 at 17:41 • 0 commentsHi!
In the last 2 months, I did some updates in the project. But, I'm little busy with the work and graduation so, I using the leftover time to sleep and work on this project.
Therefore, I will try update this page in the next days.
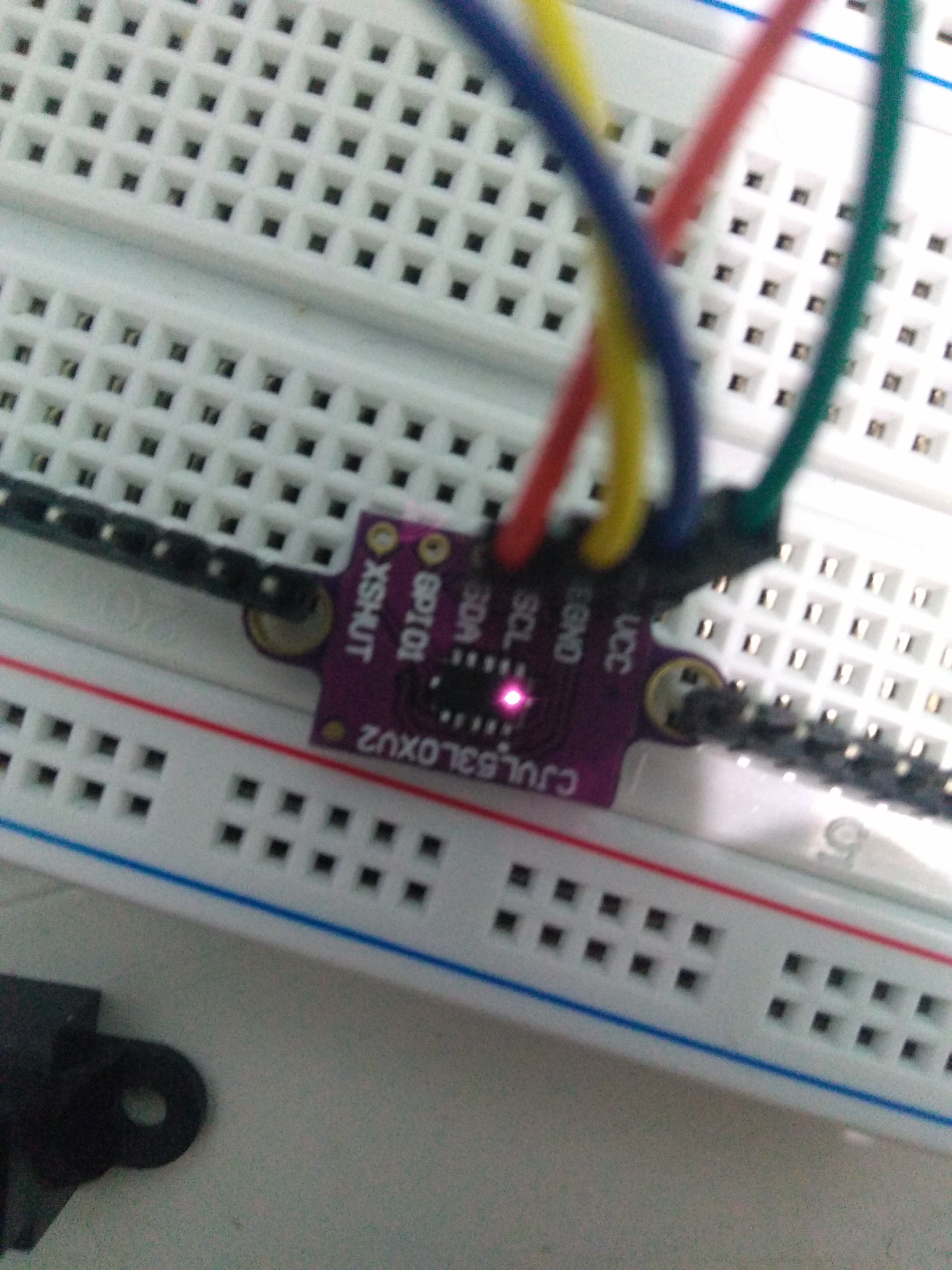
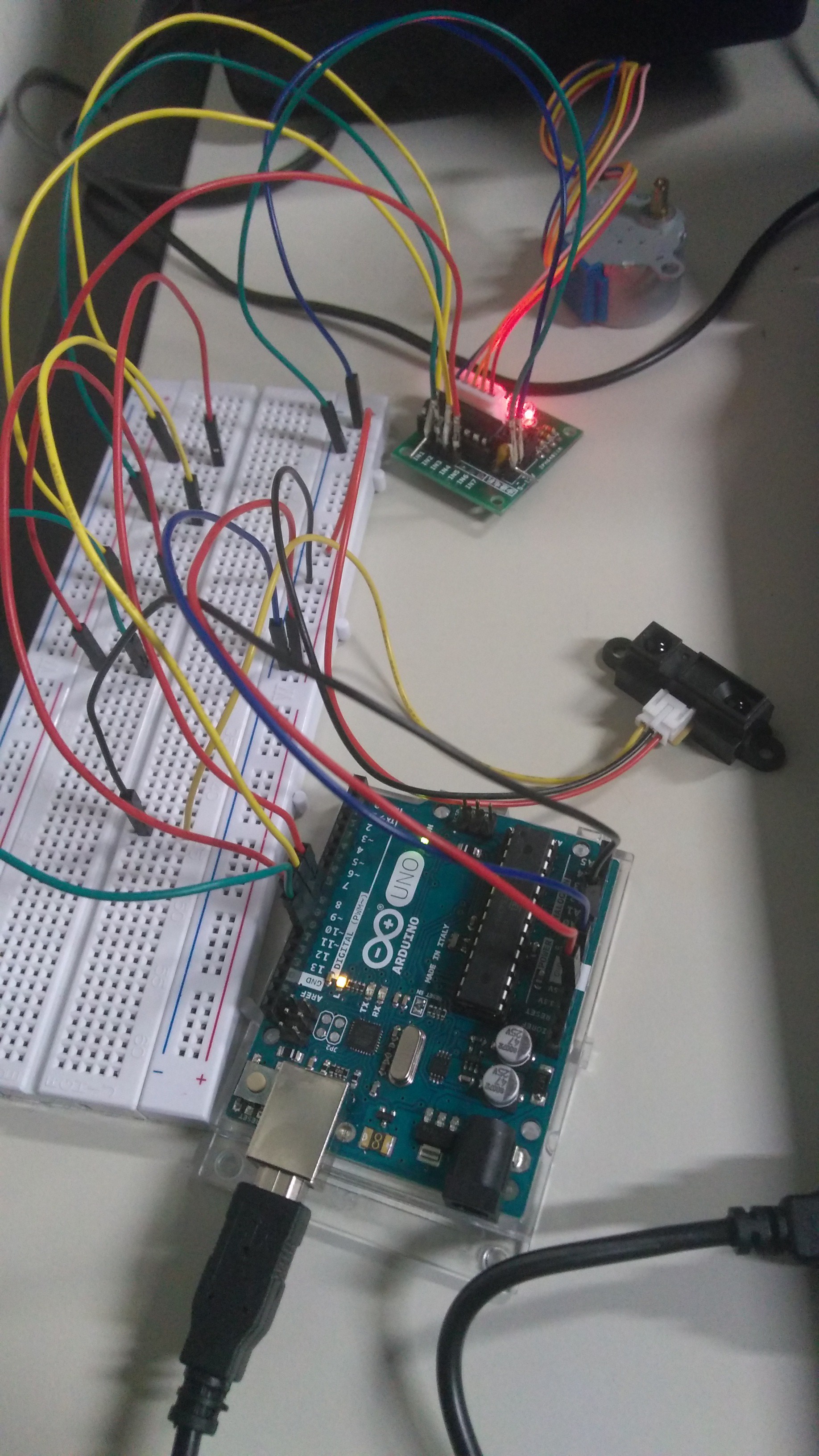
About the VL53L0X:
That's a cool TOF sensor and it runs like I imagined.
![]()
-
Mishaps
06/01/2018 at 16:53 • 0 commentsFor two weeks I have been waiting for delivery of the new sensor.
But, in brazil, we have a big strike of the truck drivers at now. And any delivery need more time that foreseen.
So, I can't done my project on the time that I have planned.
I don't have any progress to show now(sorry) but, this it's a part of the project R&D.
-
The good, the bad and the (probably) good news.
05/18/2018 at 03:13 • 0 comments![]()
I don't know exactly how it's works...
When I did the first test with the Sharp sensor on a mirror, I don't know, or I can't remenber if I did all the tests that could be possible. Or if I did one test and it worked well and I jumped the other tests. But now, I bought a lot of mirrors and neither of then works well.
I bought a dieletric mirros and normal mirrors.
![]()
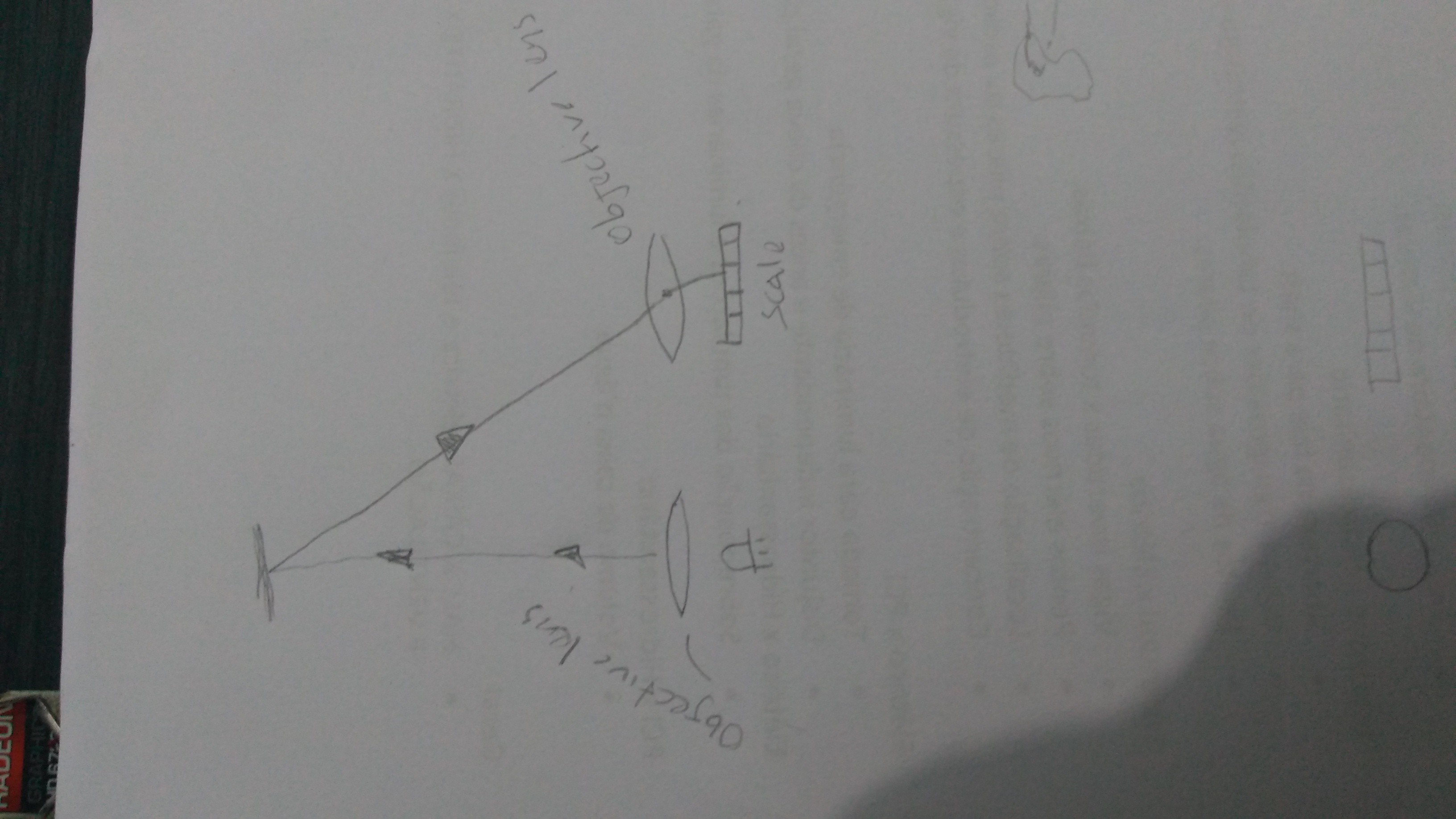
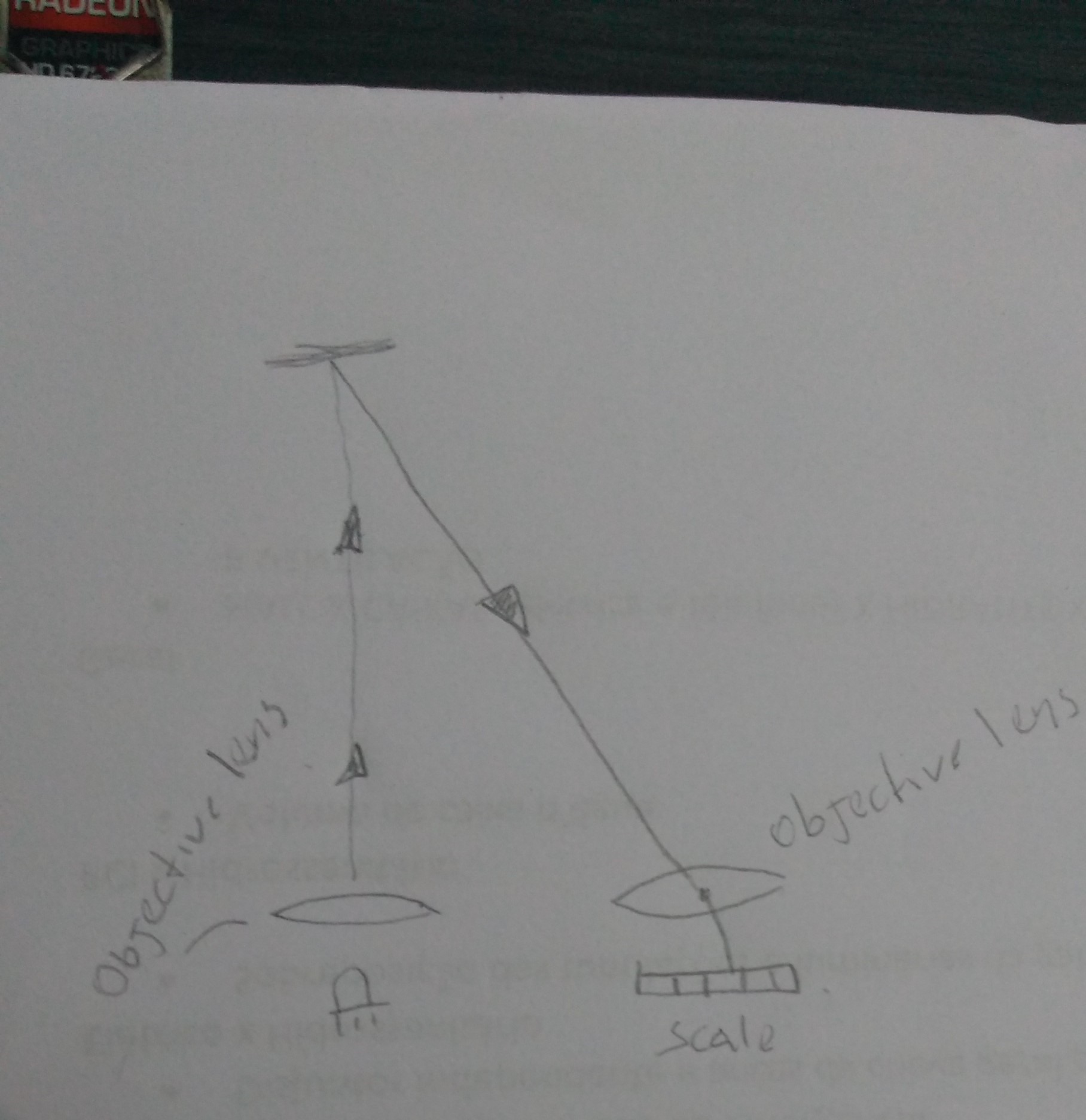
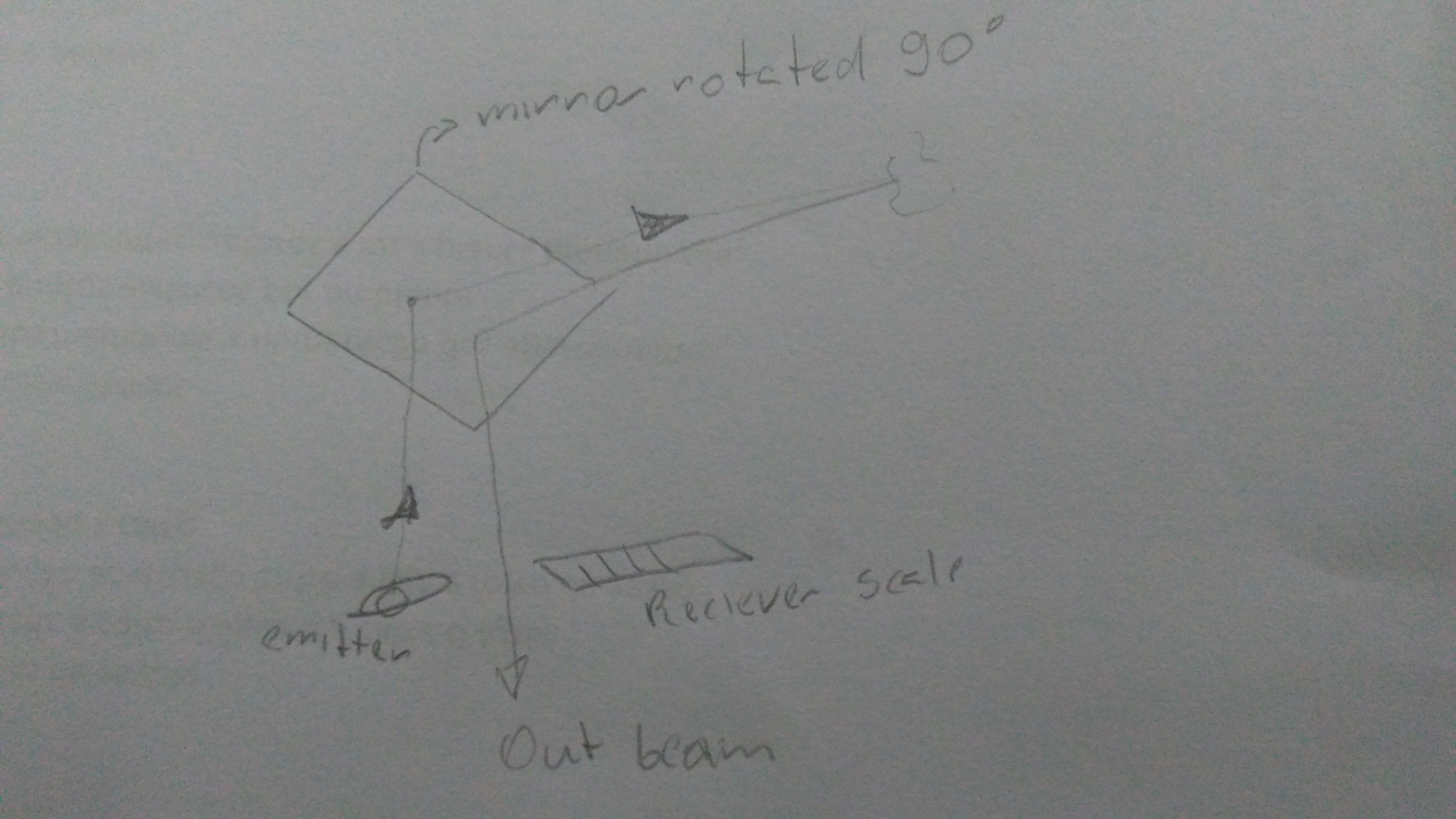
The cause:
![]()
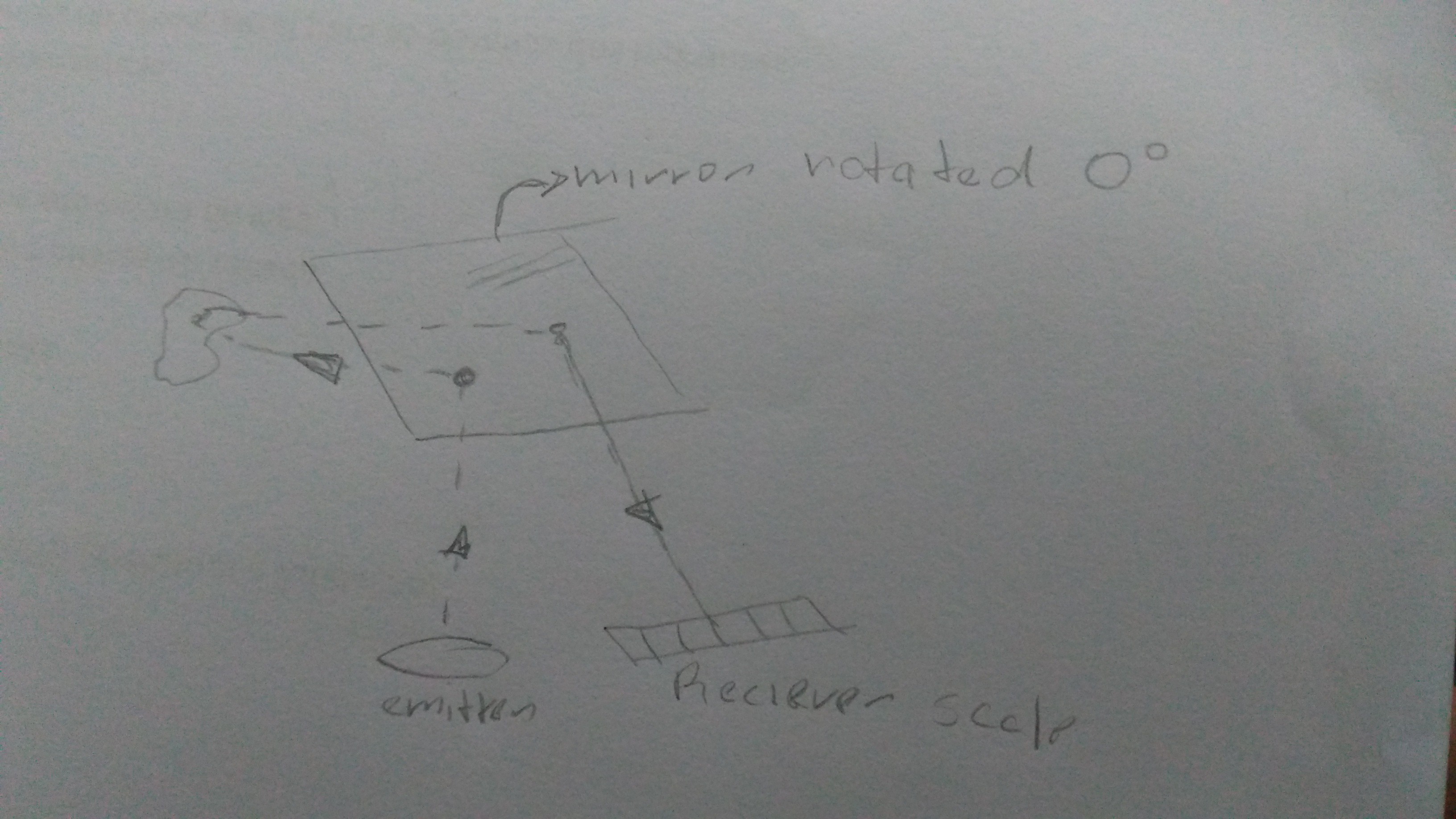
The Sharp sensor works by a triangulation of the emitter and a scale on the reciever. When I use a rotating mirror, these results can't be registered on the scale.
![]()
![]()
![]()
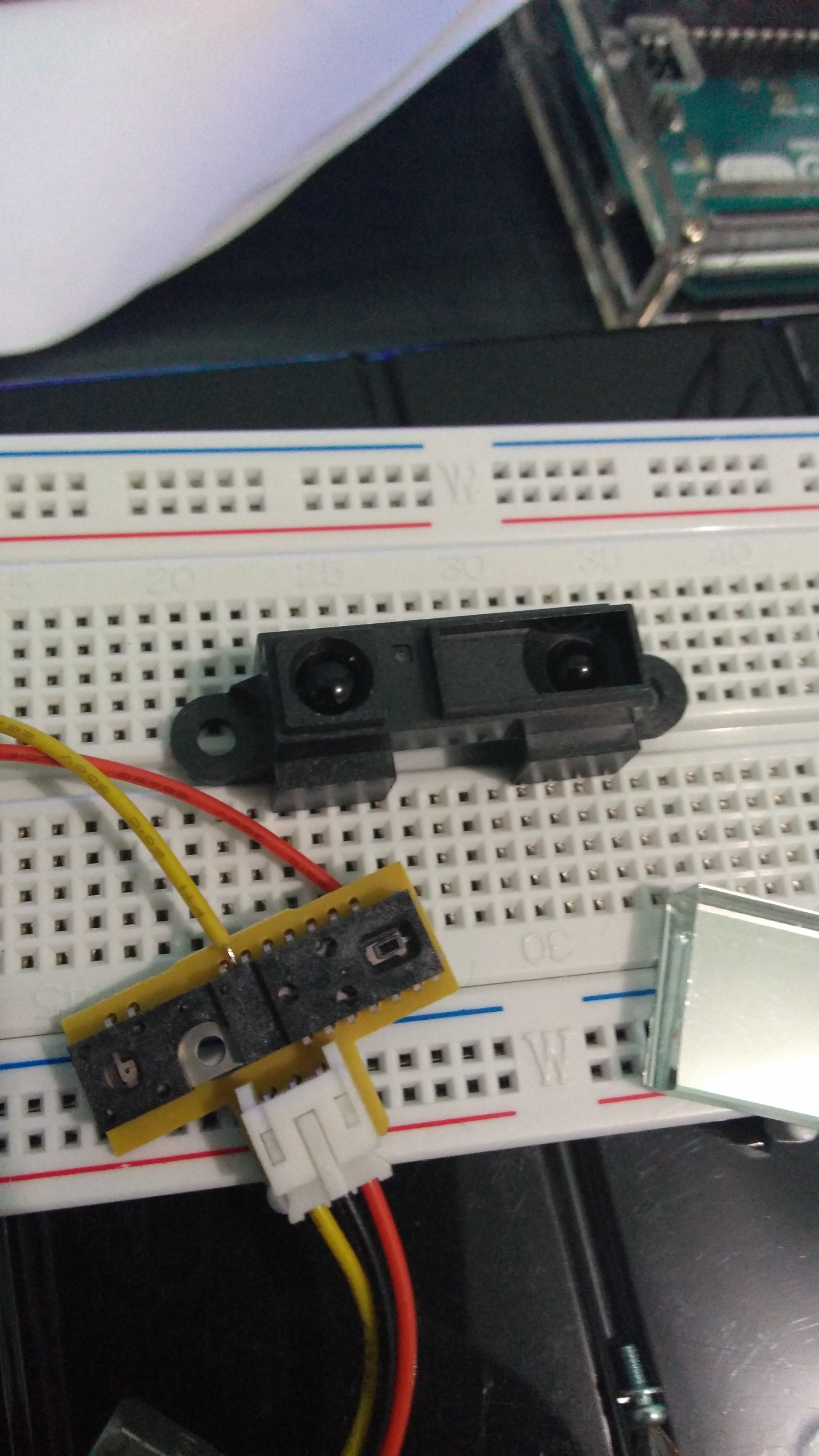
The solution:
I will change the Sharp sensor to the gy-530-vl53l0x
![]()
I will purchase this sensor and make a lot of tests.
-
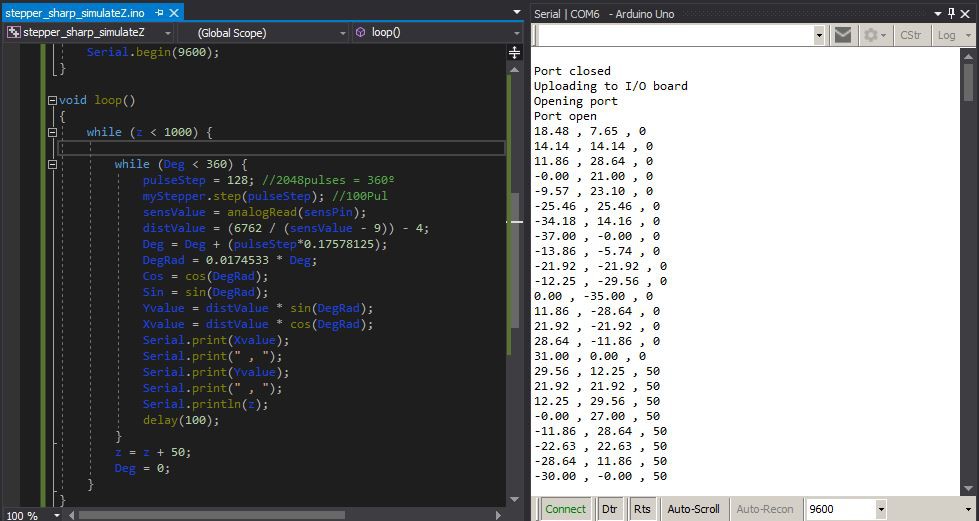
First complete mesh ( simulating Z axis)
05/04/2018 at 23:49 • 0 commentsToday I'm simulating the operation ( I keep on my mind ideas to solving the Z and pendulum problem).
![]()
![]()
I'm considering an turn for a 50cm in -Z axis.
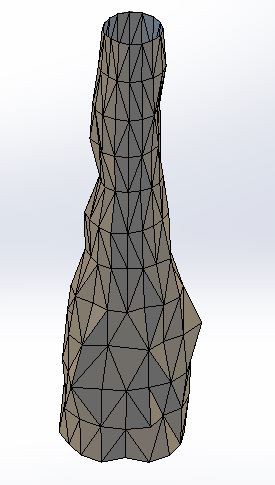
... And, I get the points! \o/
![]()
... And created the mesh
![]()
![]()
With this results, I finished the first tests and solve the main concern.
-
GPS coordinates on the scanner and BIM application
05/03/2018 at 23:20 • 0 commentsWhen I begined to imagine the application for the scanner (in the commercial point of view), I have the idea to provide an as-built about the excavation to a BIM software. It's looking good, because this show an professional application to the project. Is a simple process:
Before a start of the scan, the GPS sensor will get the coordinates and archieve this information to input on BIM. Therefore, making the scan unique.
In the next week, I will receive more sensors to make a test of this idea.
Deep Foundation Laser Scanner
This project try get the dimensions about a deep foundation without a danger to the responsible for the excavation survey.