 Mike Rigsby
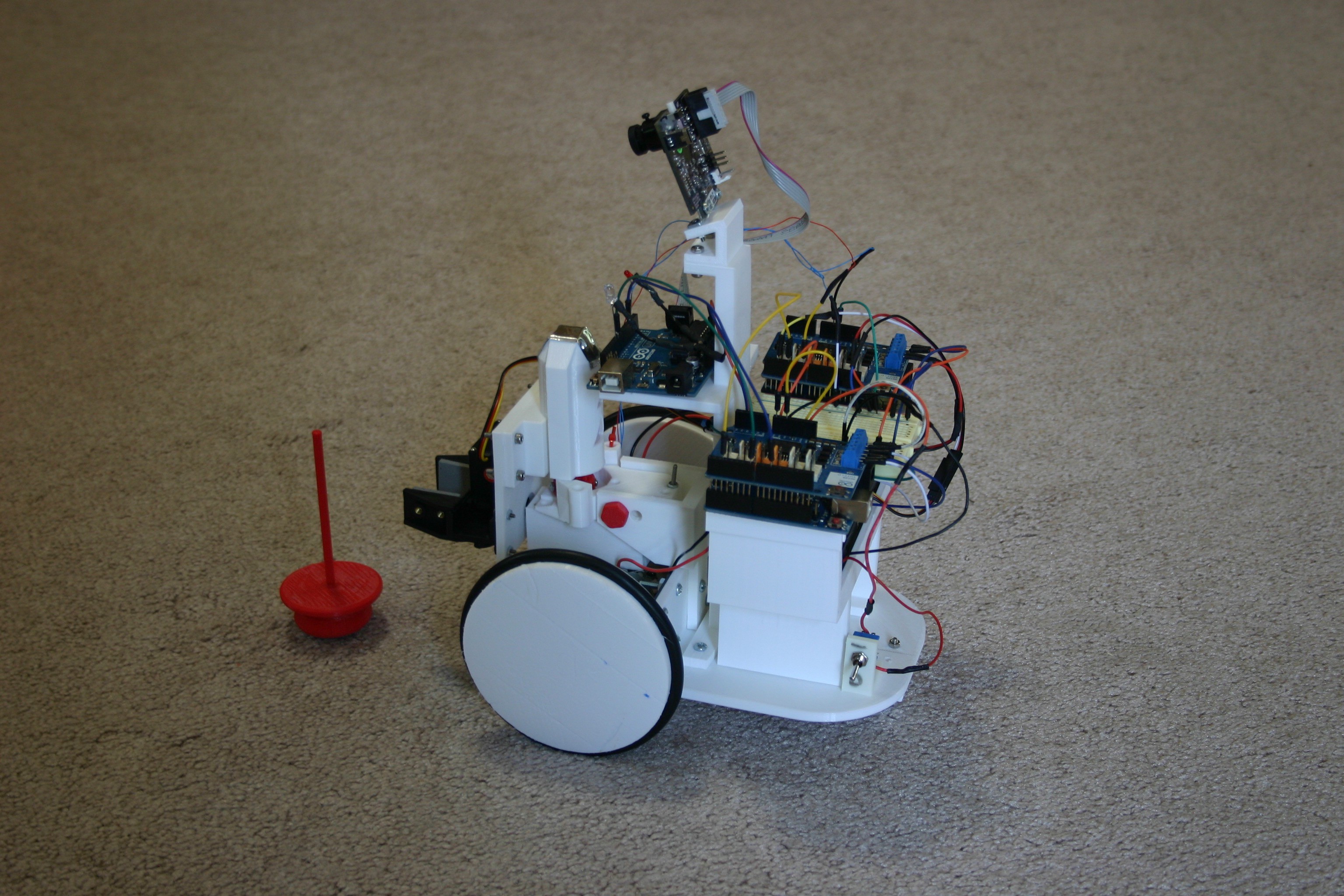
Mike RigsbyNow the robot will seek the target "thing" and lift it off the ground.
This is accomplished by using the vision controller, ping controller and motor controller.
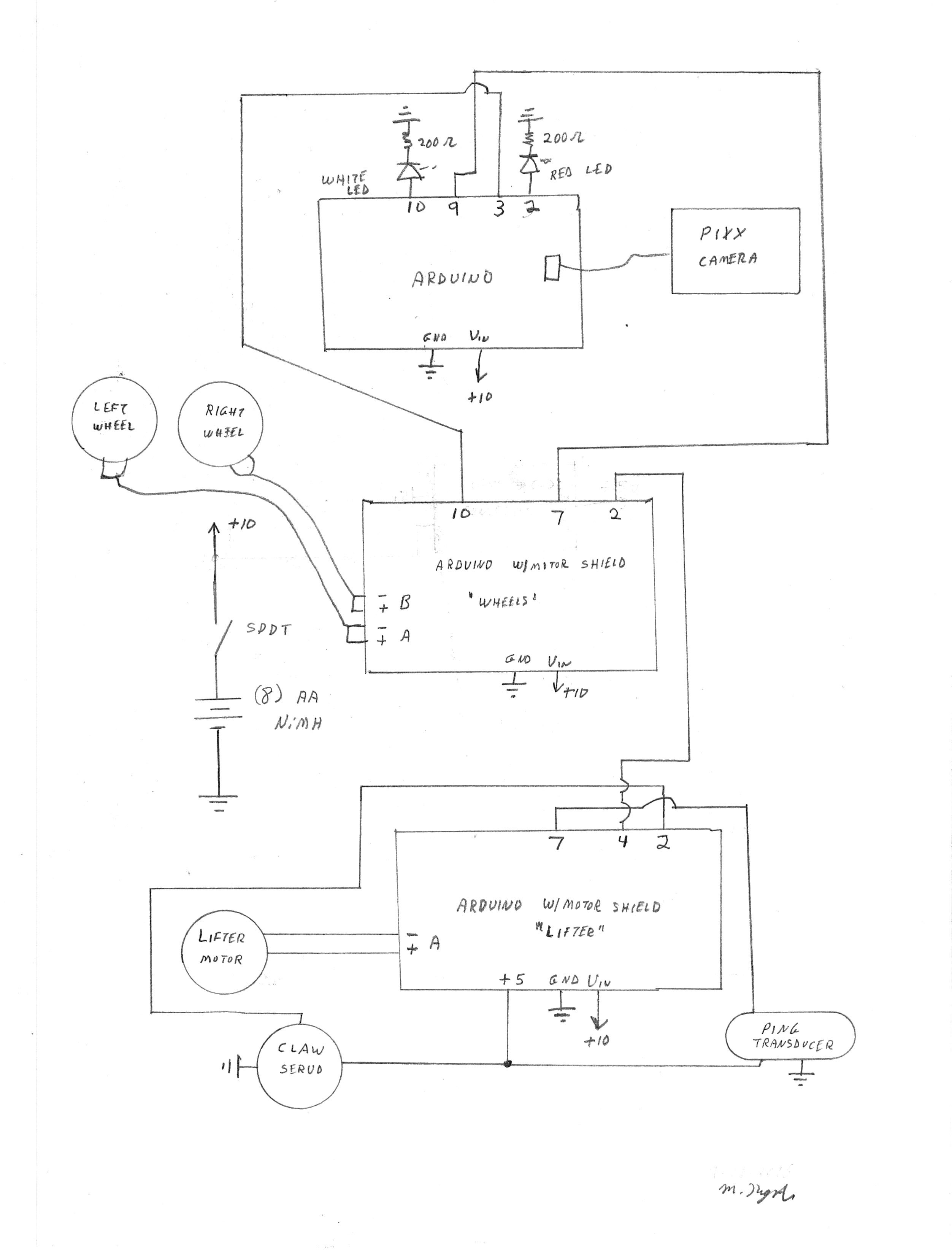
Wire as shown in the schematic and install the Arduino sketches (available on this site).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.