 Tim Wilkinson
Tim WilkinsonAfter some experimentation with the first ESC configuration, it turned out that simply controlling the maximum rate the motor velocity changed was not quiet enough to stop it resetting when rapidly switching from forward to backward; I needed to add a "pause at neutral" time as well.
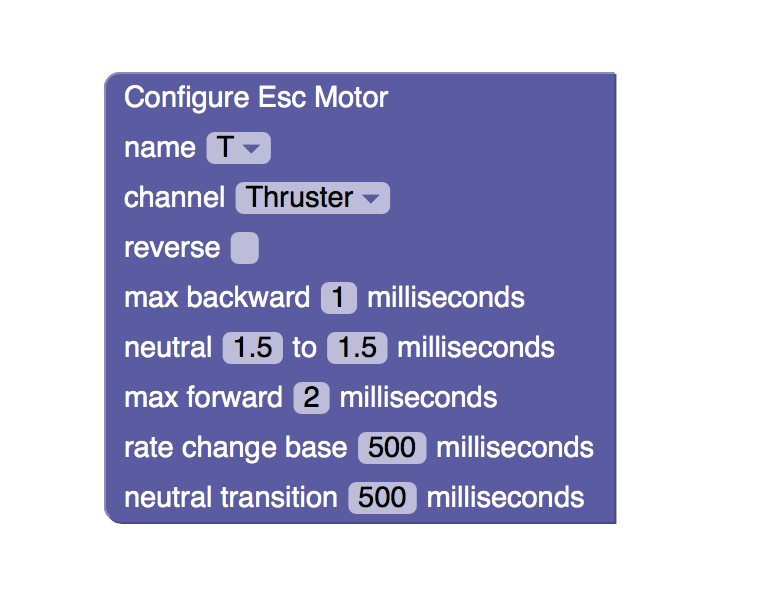
The new configuration, seen above, is very like the pervious one except now there's a "rate change base" which controls the fastest rate at which the velocity can change, and a "neutral transition" time which pauses the motor - momentarily - when passing through neutral.
Of course, I'm testing these values running my motors in air when they will ultimately be running in water. Given that, I expect I can decrease the rate and neutral times to improve robot responsiveness once everything gets wet.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.