 Álvaro Bátrez
Álvaro Bátrez-
1Step 1
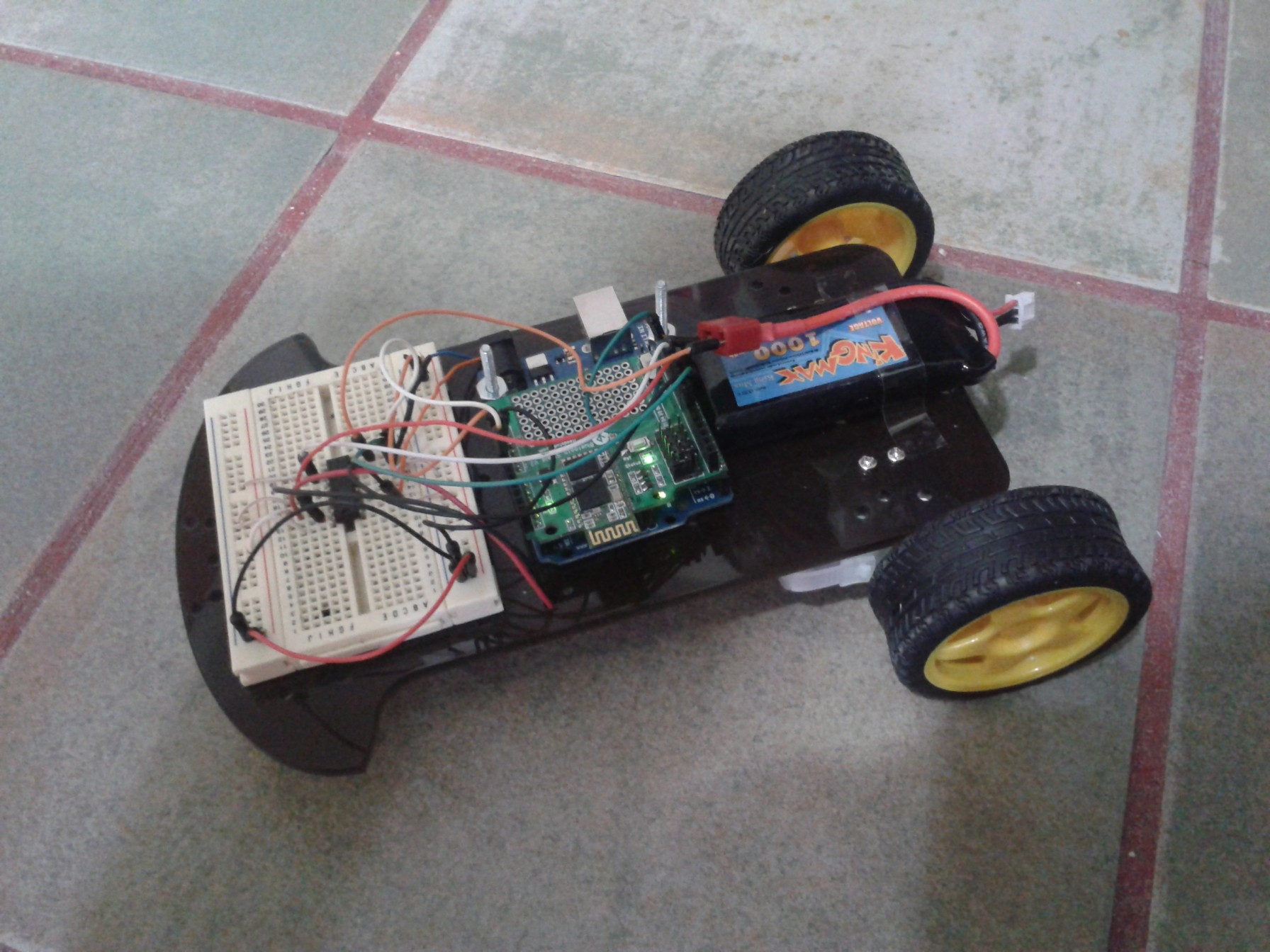
You can us any RC car or you can build one. If you haven't one, you only need to put the 2 geared motors, the caster wheels, one protoboard and the li-po battery in the acrylic chassis. I use a bluetooth controlled car like base for HandBot.
![]()
-
2Step 2
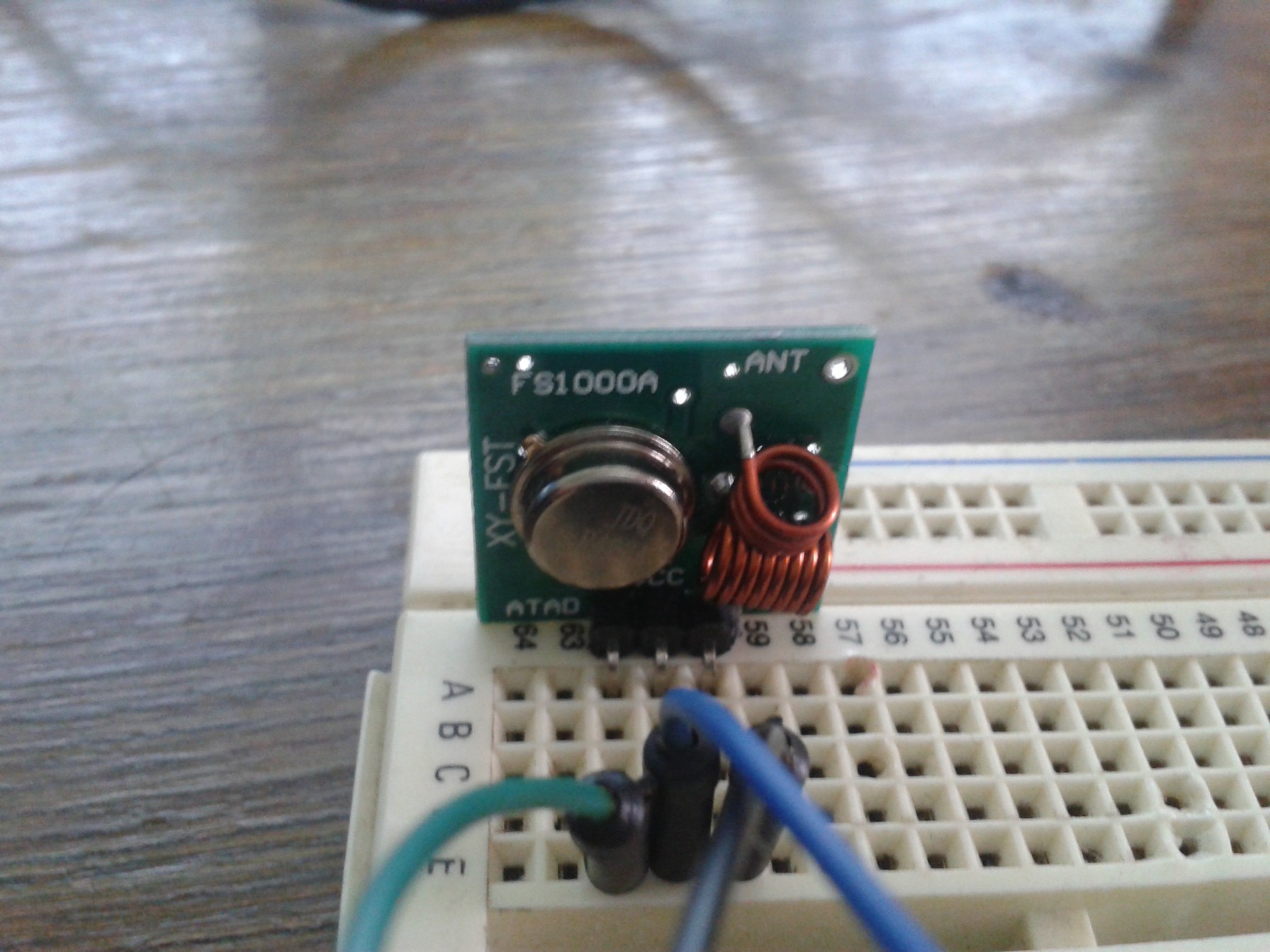
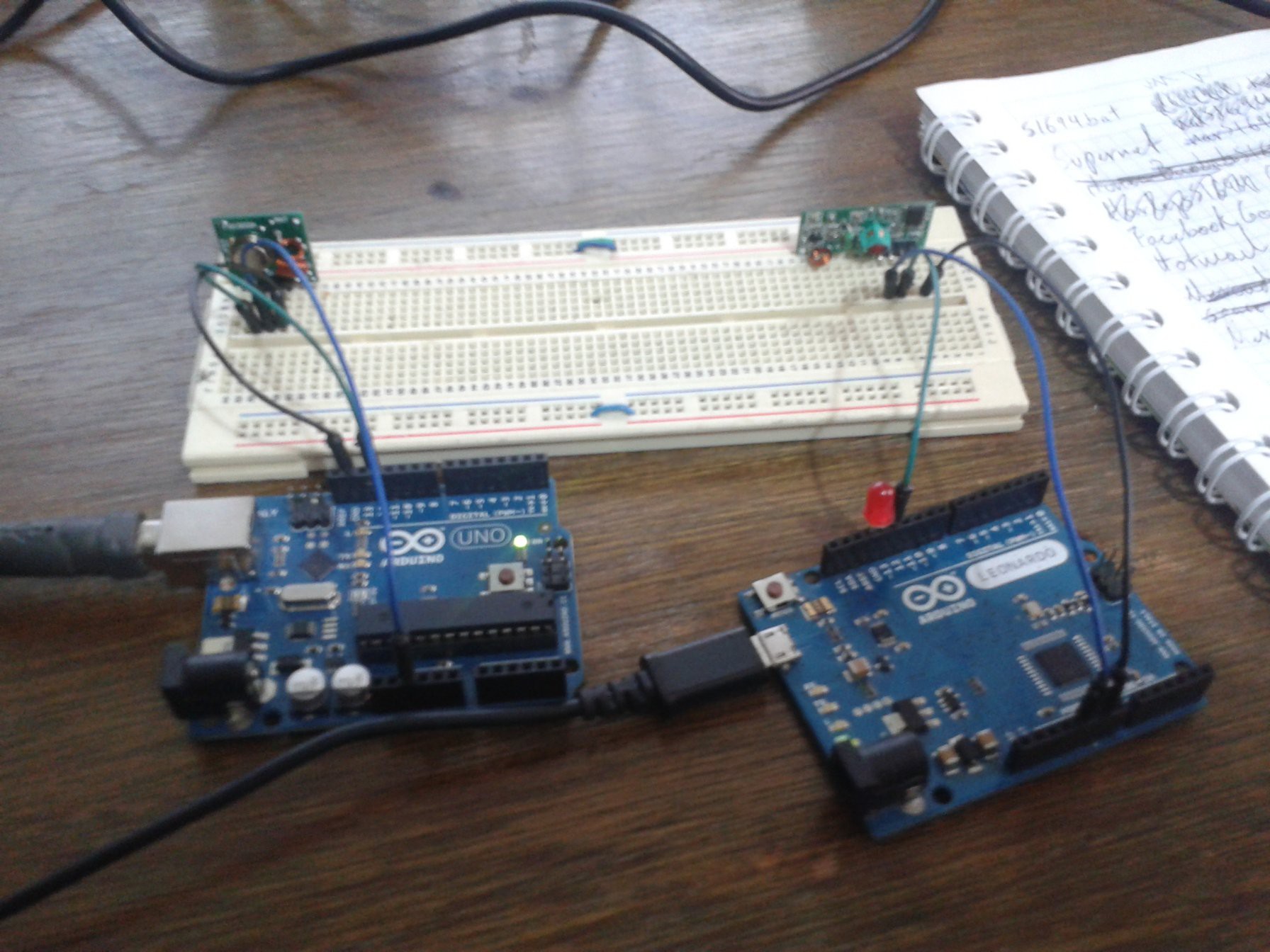
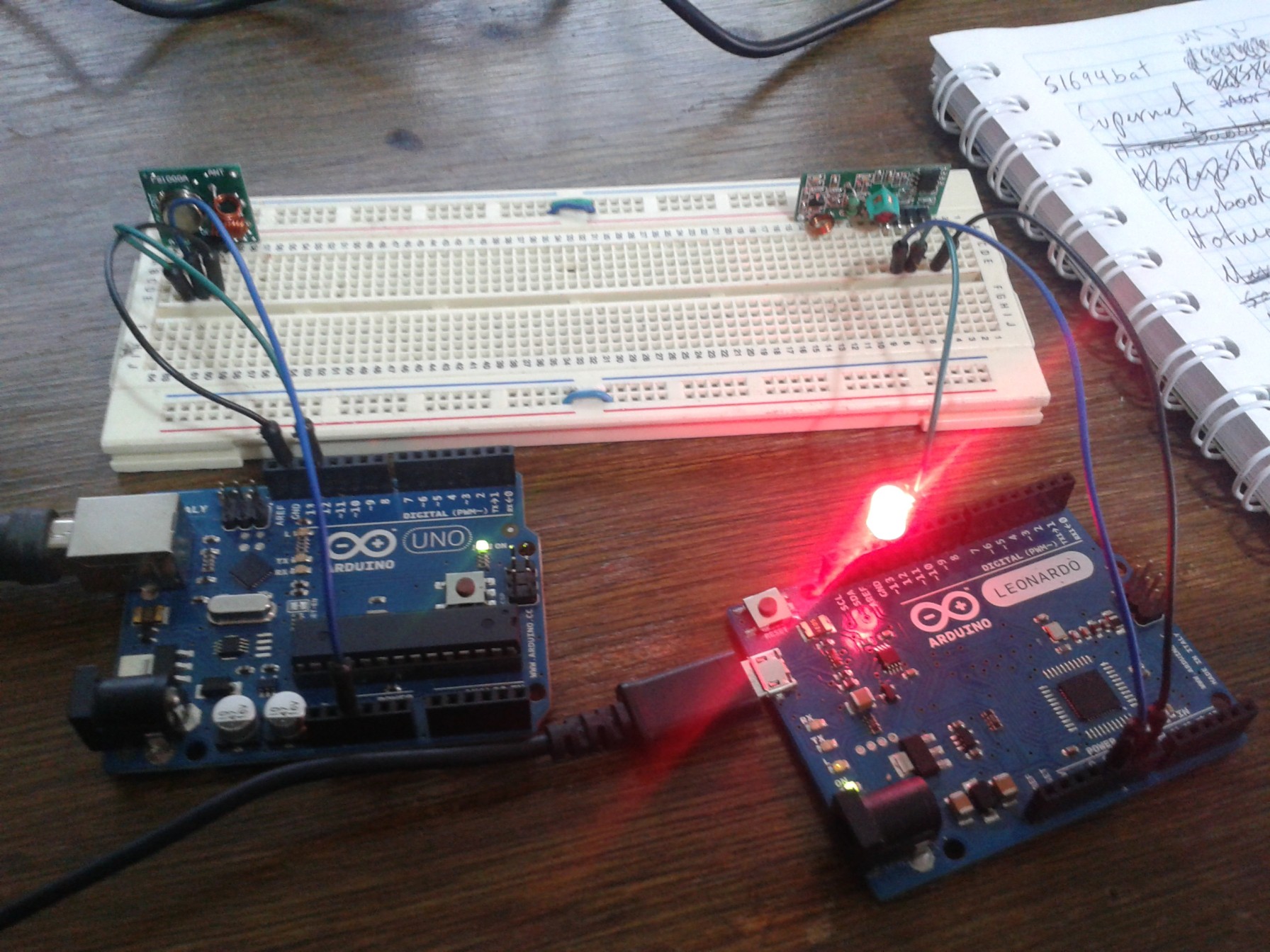
First you need to verify to correct operation of the RF devices. This will be easy by a LED indicator, the control will be managed by two keys "w" and "s" of your computer's keyboard.
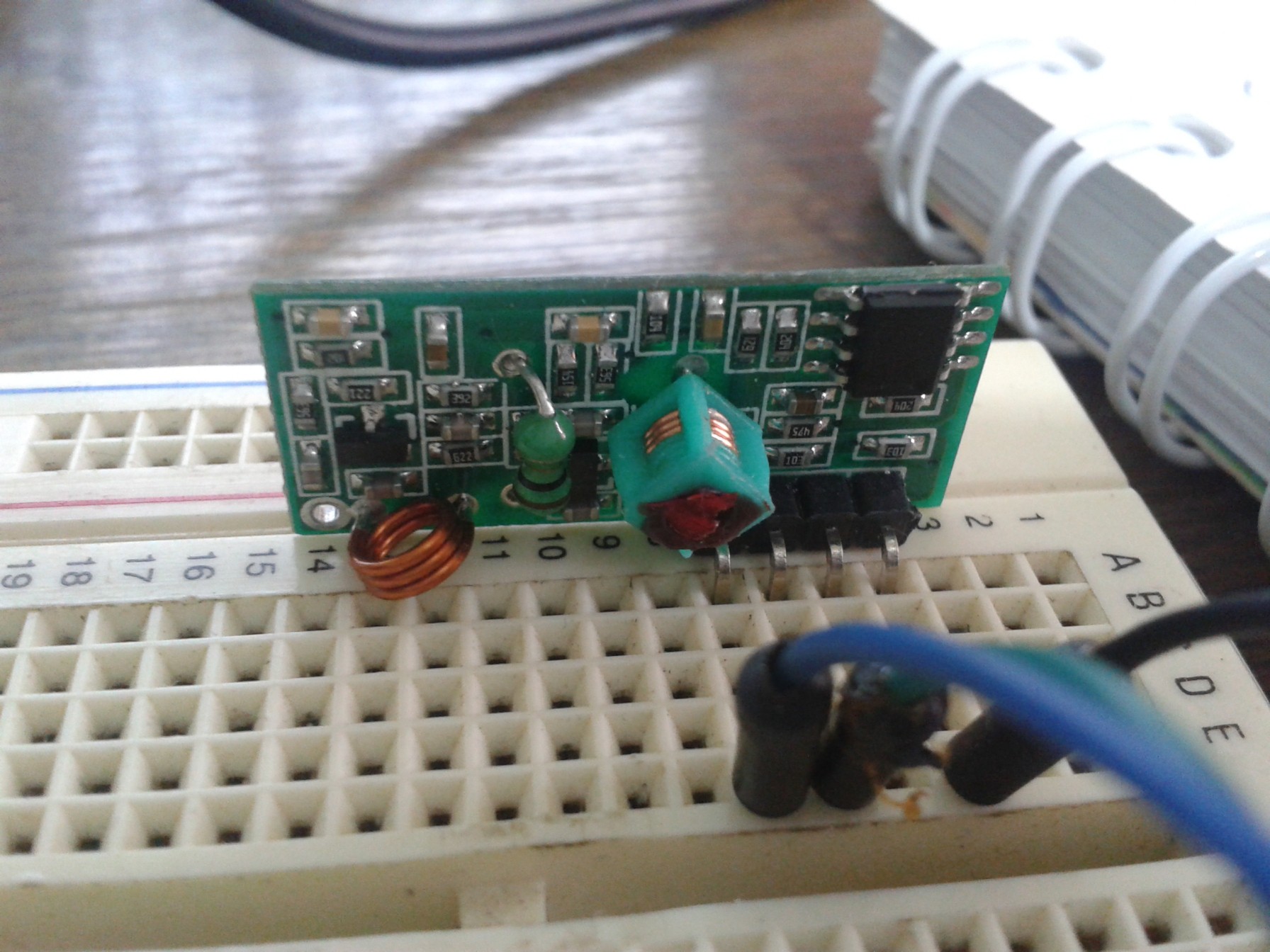
Connect VCC to 5V pin.
GND to GND pin.
Data to pin 12 in both Arduinos.
LED to pin 13 in the receptor Arduino.
Transmitter module:
![]()
Receiver module:
![]()
LED off:
![]()
LED on:
![]()
You need to download VirtualWire library.
Code for TX:
#include<VirtualWire.h>
int key = 0;
char *controller;
void setup(){
Serial.begin(9600);
vw_set_ptt_inverted(true);
vw_set_tx_pin(12);
vw_setup(4000);
}
void loop(){
if(Serial.available() > 0){
key = Serial.read();
switch(key){
case 'w': controller = "1";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
break;
case 's': controller = "0";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
break;
}
}
}
Code for RX:
#include <VirtualWire.h>
void setup(){
vw_set_ptt_inverted(true);
vw_set_rx_pin(12);
vw_setup(4000);
pinMode(13,OUTPUT);
vw_rx_start();
}
void loop(){
uint8_t buf[VW_MAX_MESSAGE_LEN];
uint8_t buflen = VW_MAX_MESSAGE_LEN;
if(vw_get_message(buf, &buflen)){
if(buf[0]=='1'){
digitalWrite(13,HIGH);
delay(1000);
}
if(buf[0]=='0'){
digitalWrite(13,LOW);
delay(1000);
}
}
}
-
3Step 3
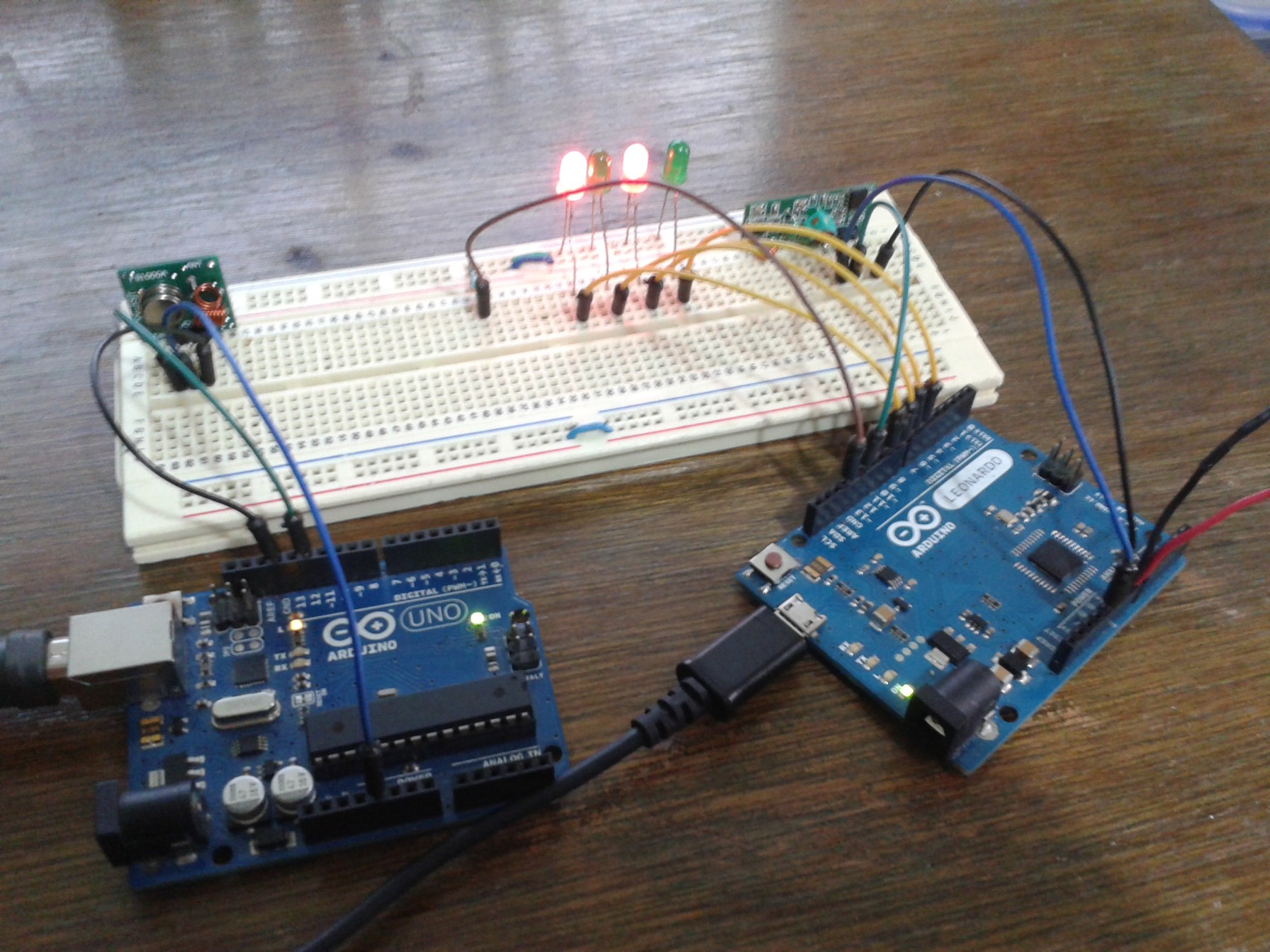
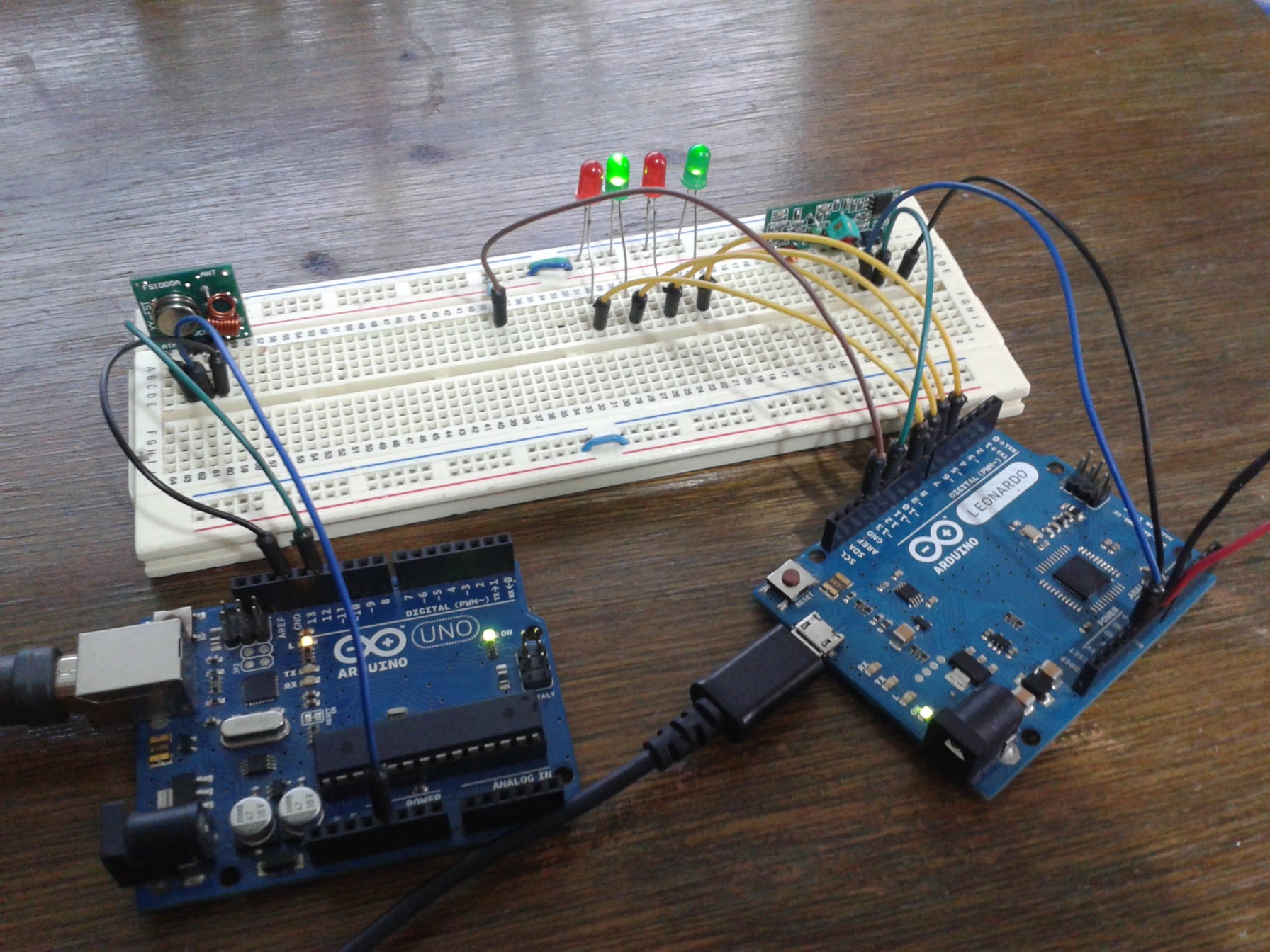
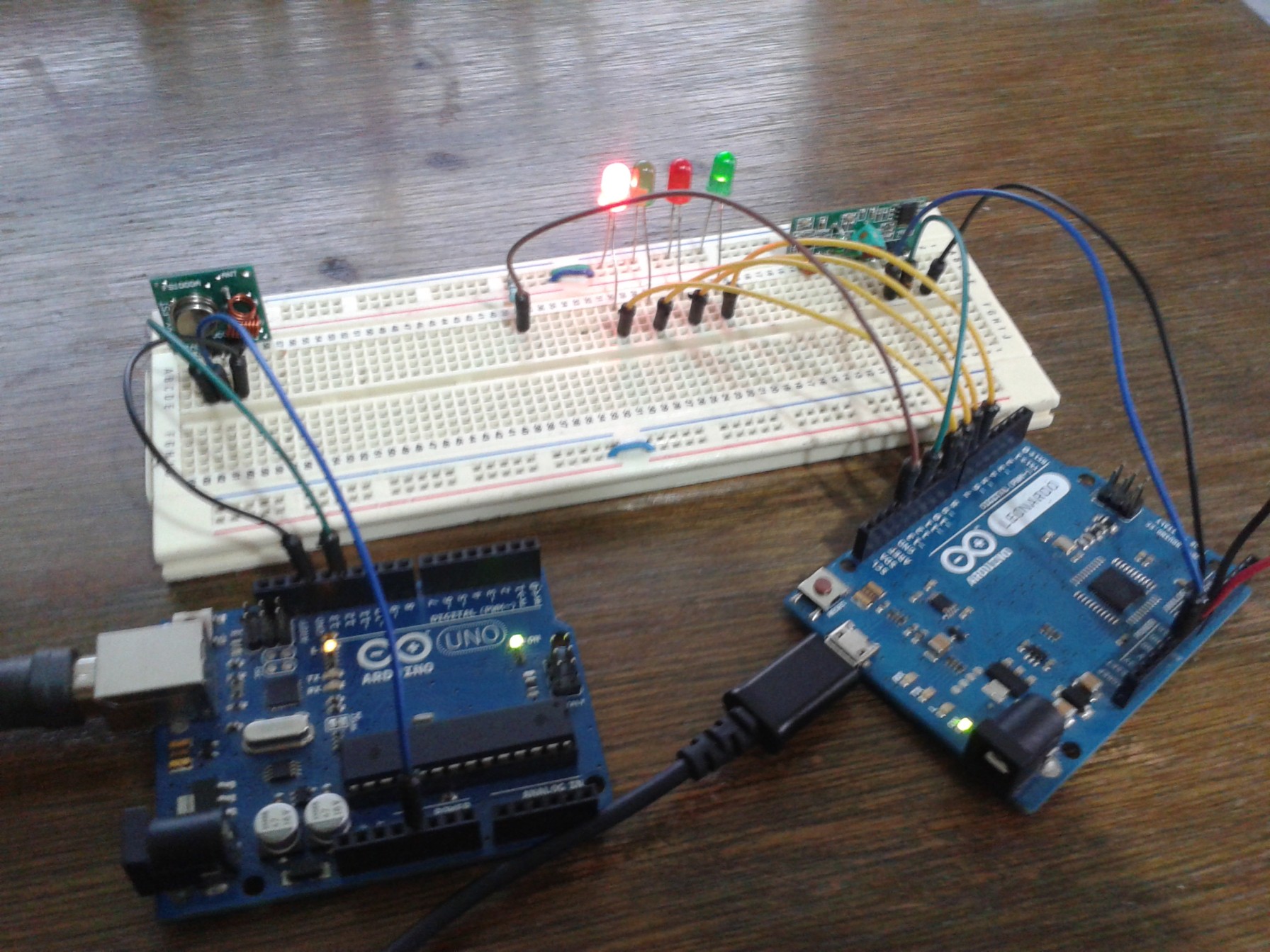
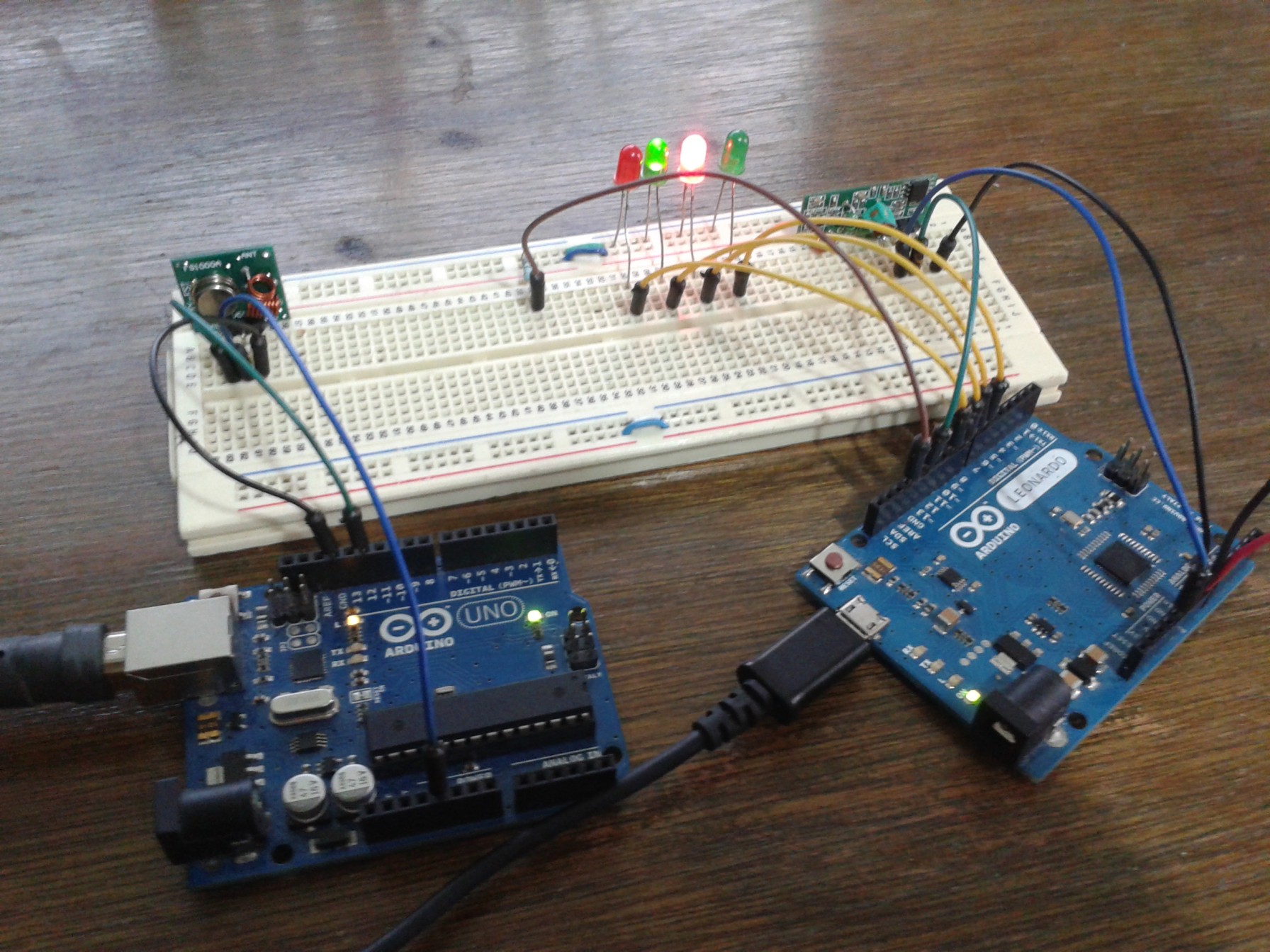
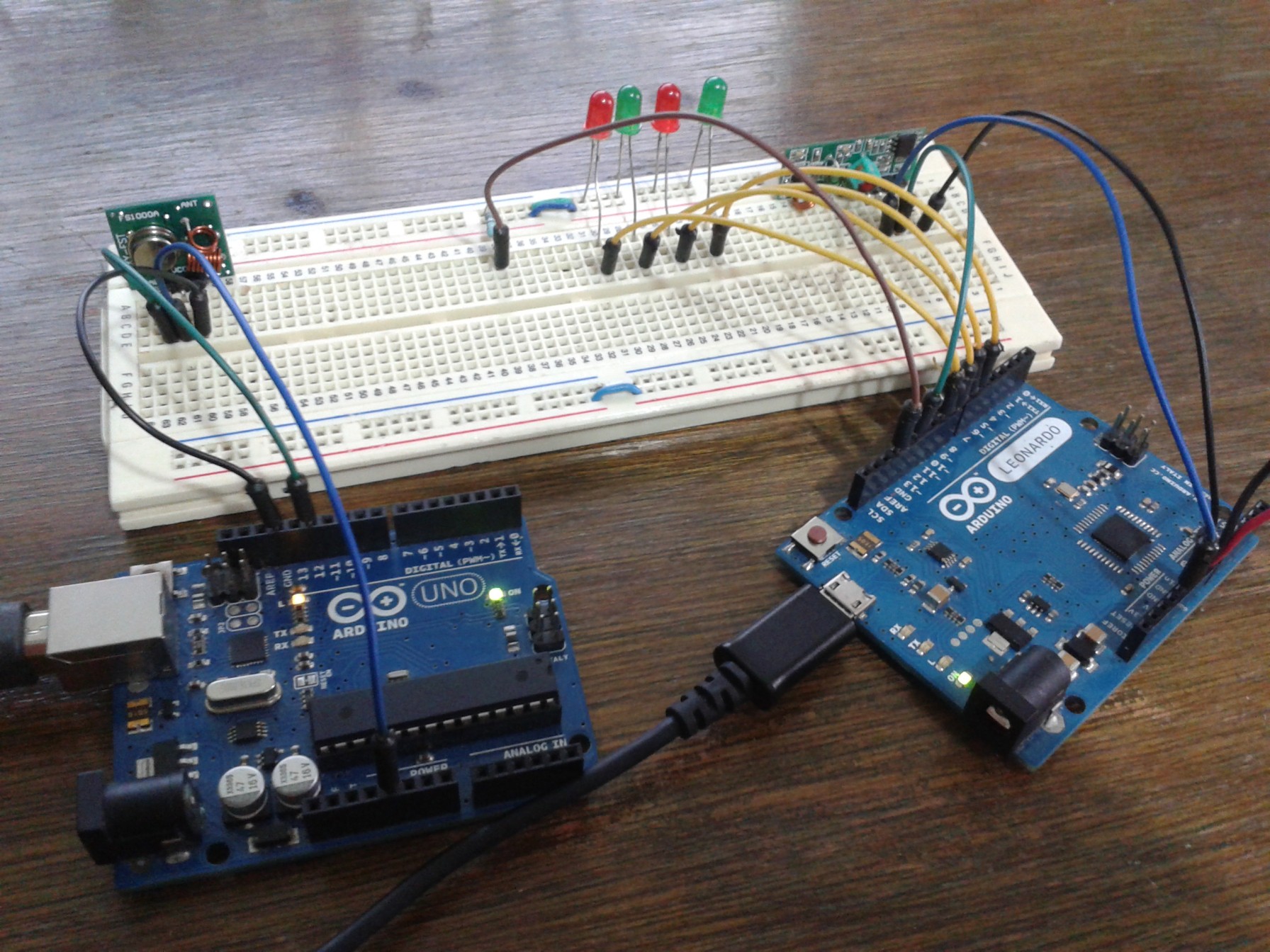
Now, you need to verify visually with LEDs the four outputs that should go to the H bridge, reds colors indicate forward, greens colors indicate backward, one red and one green colors indicate the turn left or right respectively. The control will be by the keyboard of your computer "8" fordward, "2" backward, "6" turn right, "4" turn left, "5" stop.
Connect the red LEDs to pin 9 and 7, the green LEDs to pin 8 and 6.
Forward key "8":
![]()
Backward key "2":
![]()
Turn right key "6":
![]()
Turn left key "4":
![]()
Stop key "5":
![]()
Code for TX:
#include<VirtualWire.h>
int key = 0;
char *controller;
void setup(){
Serial.begin(9600);
vw_set_ptt_inverted(true);
vw_set_tx_pin(12);
vw_setup(4000);
}
void loop(){
if(Serial.available() > 0){
key = Serial.read();
switch(key){
case '8':controller = "8";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
break;
case '2': controller = "2";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
break;
case '6':controller = "6";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
break;
case '4':controller = "4";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
break;
case '5':controller = "5";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
break;
}
}
}
Code for RX:
#include <VirtualWire.h>
void setup(){
vw_set_ptt_inverted(true);
vw_set_rx_pin(12);
vw_setup(4000);
pinMode(9,OUTPUT);
pinMode(8,OUTPUT);
pinMode(7,OUTPUT);
pinMode(6,OUTPUT);
vw_rx_start();
}
void loop(){
uint8_t buf[VW_MAX_MESSAGE_LEN];
uint8_t buflen = VW_MAX_MESSAGE_LEN;
if(vw_get_message(buf, &buflen)){
if(buf[0]=='8'){
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
}
if(buf[0]=='2'){
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
digitalWrite(7, LOW);
digitalWrite(6, HIGH);
}
if(buf[0]=='6'){
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
digitalWrite(7, LOW);
digitalWrite(6, HIGH);
}
if(buf[0]=='4'){
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
}
if(buf[0]=='5'){
digitalWrite(9, LOW);
digitalWrite(8, LOW);
digitalWrite(7, LOW);
digitalWrite(6, LOW);
}
}
}
-
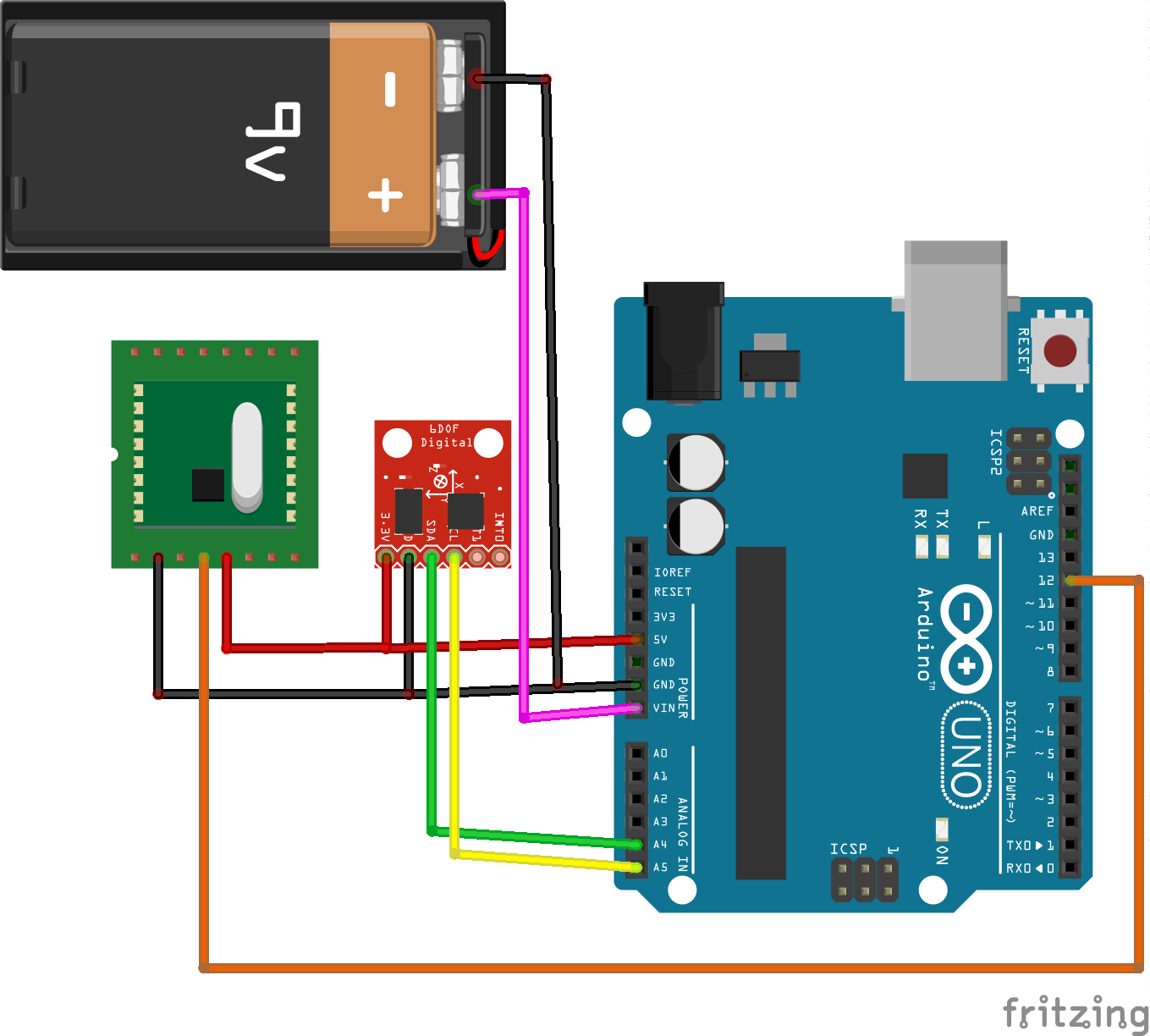
4Step 4
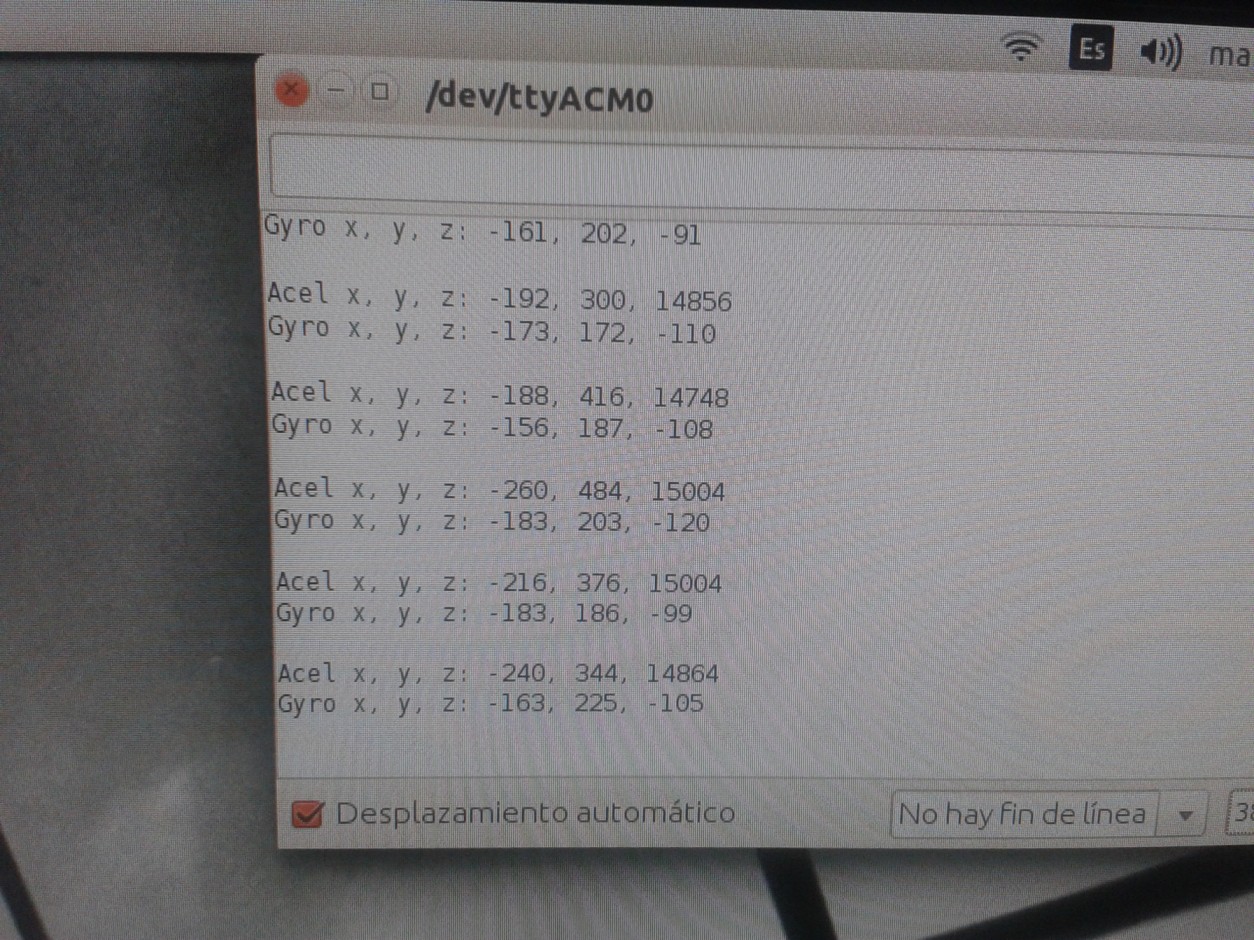
Once you have the correct programming of what will be the engine performance you need review the functioning and values of the MPU-6050 accelerometer. The X and Y axes are as the device is marked on the card.
VCC to 5V pin.
GND to GND pin.
SCL to A5 pin.
SDA to A4 pin.
Accelerometer sensor:
![]()
Values of the accelerometer and gyro:
![]()
Code for read values:
//SDA a A4, SCL a A5
#include<MPU6050.h>
#include<I2Cdev.h>
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include<Wire.h>
#endif
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
#define OUTPUT_READABLE_ACCELGYRO
//#define OUTPUT_BINARY_ACCELGYRO
void setup(){
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
Serial.begin(38400); //38400 es la velocidad optima pero puede modificarse
accelgyro.initialize();
Serial.println(accelgyro.testConnection() ? "GY-521 conexion exitosa" : "GY-521 conexion fallida");
}
void loop(){
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
#ifdef OUTPUT_READABLE_ACCELGYRO
Serial.print("Acel x, y, z: ");
Serial.print(ax);
Serial.print(", ");
Serial.print(ay);
Serial.print(", ");
Serial.println(az);
Serial.print("Gyro x, y, z: ");
Serial.print(gx);
Serial.print(", ");
Serial.print(gy);
Serial.print(", ");
Serial.println(gz);
Serial.println();
#endif
#ifdef OUTPUT_BINARY_ACCELGYRO
Serial.write((uint8_t)(ax >> 8));
Serial.write((uint8_t)(ax & 0xFF));
Serial.write((uint8_t)(ay >> 8));
Serial.write((uint8_t)(ax & 0xFF));
Serial.write((uint8_t)(az >> 8));
Serial.write((uint8_t)(ax & 0xFF));
Serial.write((uint8_t)(gx >> 8));
Serial.write((uint8_t)(ax & 0xFF));
Serial.write((uint8_t)(gy >> 8));
Serial.write((uint8_t)(ax & 0xFF));
Serial.write((uint8_t)(gz >> 8));
Serial.write((uint8_t)(ax & 0xFF));
#endif
delay(3000);
}
-
5Step 5
Once the correct reading of the accelerometer is verified, you will need to set values of operation and you are going to insert this code in the visual engine performance code. Operation will be visually checked by the LEDs before connecting to the the circuit.
Check the change of the outputs while turning the sensor:
![]()
![]()
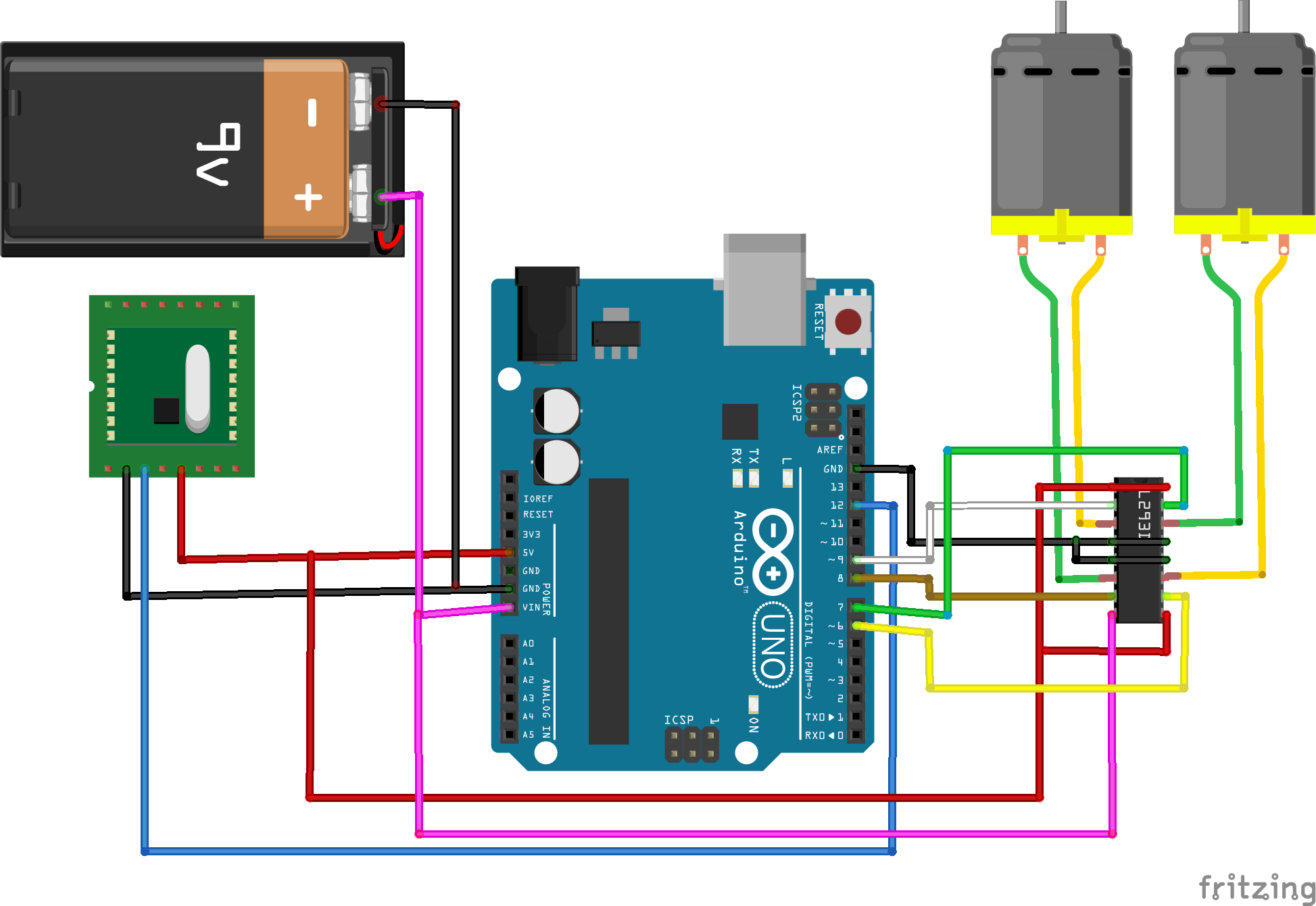
Before you can connect the outputs of the arduino to the motors, you need a H bridge L293D, this device can manage high voltage to power the motors (max 36V). Check its datasheet before you connect it.
Complete transmitter circuit:
![]()
Complete receiver circuit:
![]()
Main TX code:
#include<VirtualWire.h>
#include<MPU6050.h>
#include<I2Cdev.h>
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include<Wire.h>
#endif
MPU6050 accelgyro;
int16_t ax, ay, az;
int16_t gx, gy, gz;
#define OUTPUT_READABLE_ACCELGYRO
int key = 0;
char *controller;
void setup(){
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
Serial.begin(9600);
accelgyro.initialize();
vw_set_ptt_inverted(true);
vw_set_tx_pin(12);
vw_setup(4000);
}
void loop(){
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
#ifdef OUTPUT_READABLE_ACCELGYRO
if(ax <= -10000){
controller = "8";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
}else{
if(ax >= 10000){
controller = "2";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
}else{
if(ay >= 10000){
controller = "6";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
}else{
if(ay <= -10000){
controller = "4";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
}else{
controller = "5";
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx();
}
}
}
}
#endif
}
Main RX Code:
#include <VirtualWire.h>
void setup(){
vw_set_ptt_inverted(true);
vw_set_rx_pin(12);
vw_setup(4000);
pinMode(9,OUTPUT);
pinMode(8,OUTPUT);
pinMode(7,OUTPUT);
pinMode(6,OUTPUT);
vw_rx_start();
}
void loop(){
uint8_t buf[VW_MAX_MESSAGE_LEN];
uint8_t buflen = VW_MAX_MESSAGE_LEN;
if(vw_get_message(buf, &buflen)){
if(buf[0]=='8'){
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
}
if(buf[0]=='2'){
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
digitalWrite(7, LOW);
digitalWrite(6, HIGH);
}
if(buf[0]=='6'){
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
digitalWrite(7, LOW);
digitalWrite(6, HIGH);
}
if(buf[0]=='4'){
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
digitalWrite(7, HIGH);
digitalWrite(6, LOW);
}
if(buf[0]=='5'){
digitalWrite(9, LOW);
digitalWrite(8, LOW);
digitalWrite(7, LOW);
digitalWrite(6, LOW);
}
}
}
-
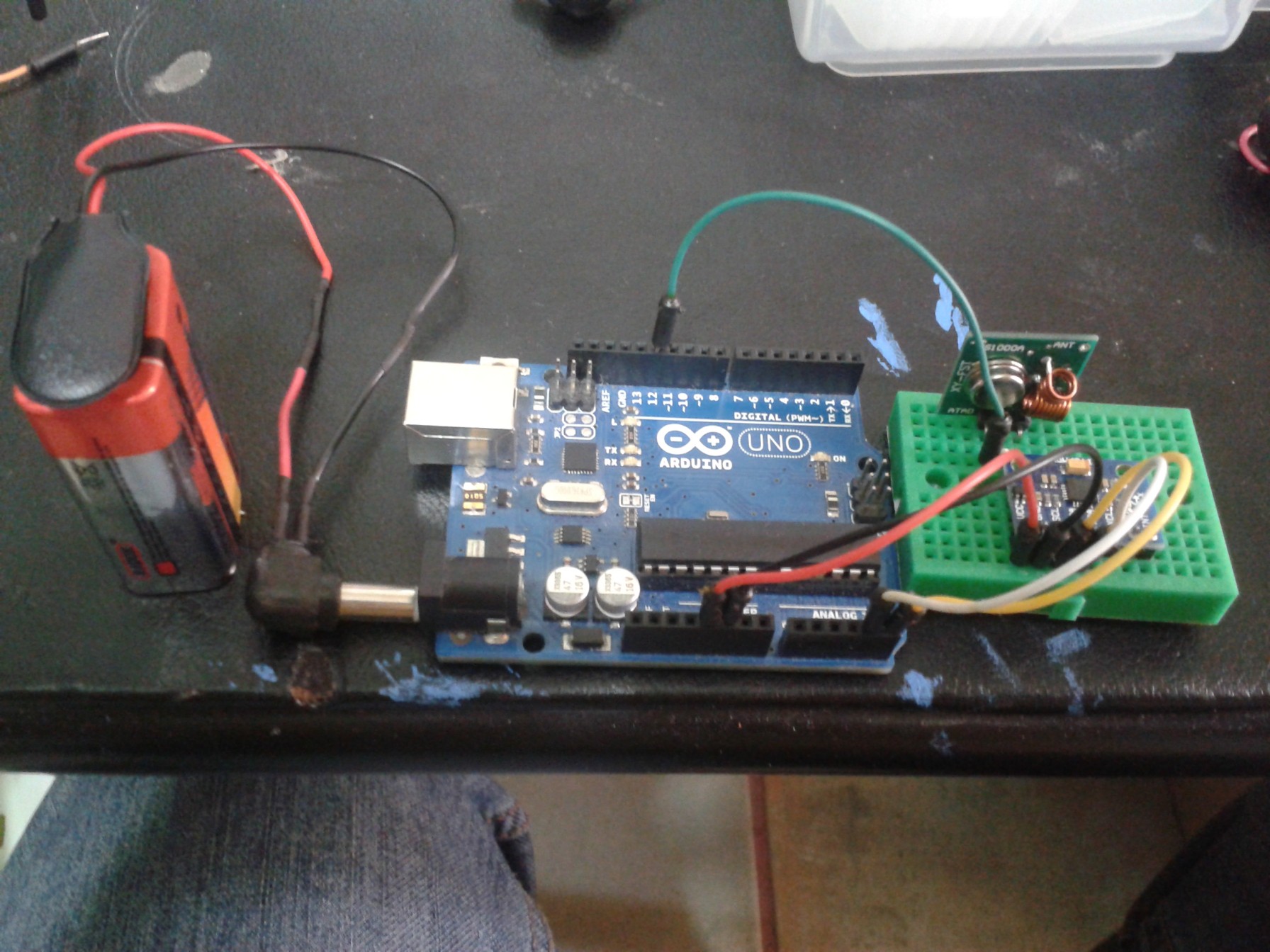
6Step 6
Finally you put the controll circuit inside the fabric wristband and put it in the hand or arm of the user.
Transmitter circuit:
![]()
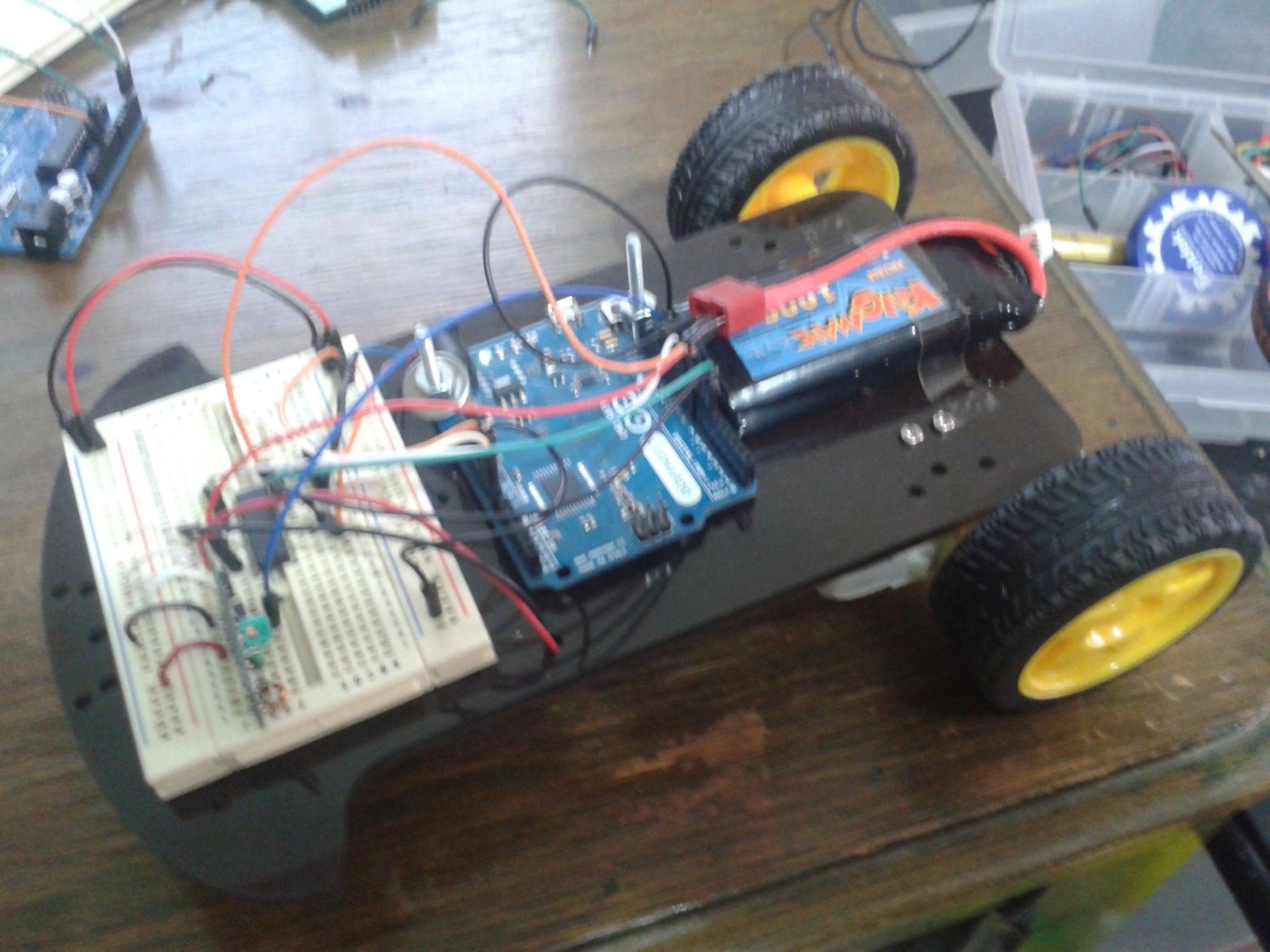
Car:
![]()
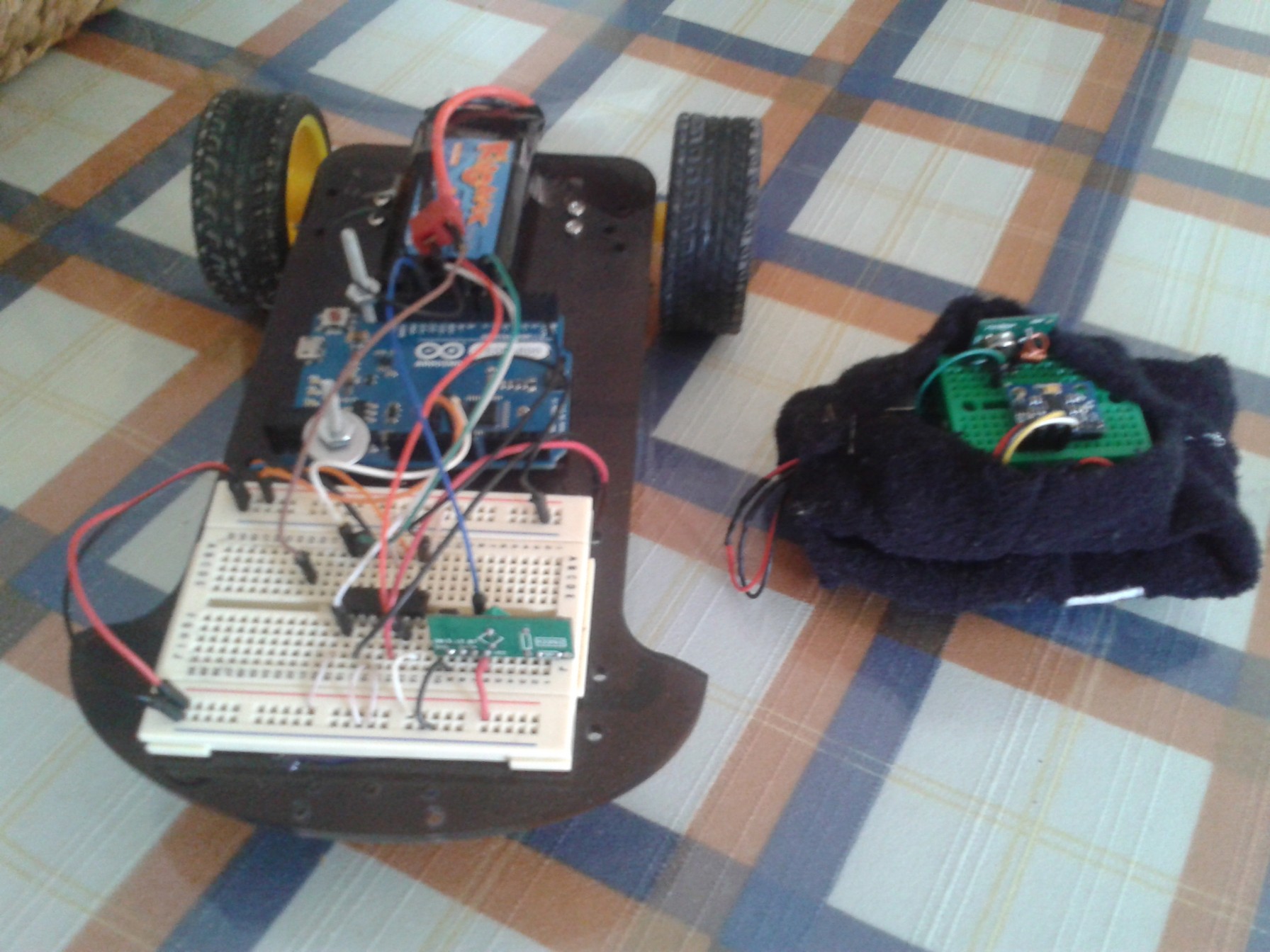
Control band:
![]()
HandBot complete!
![]()


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.